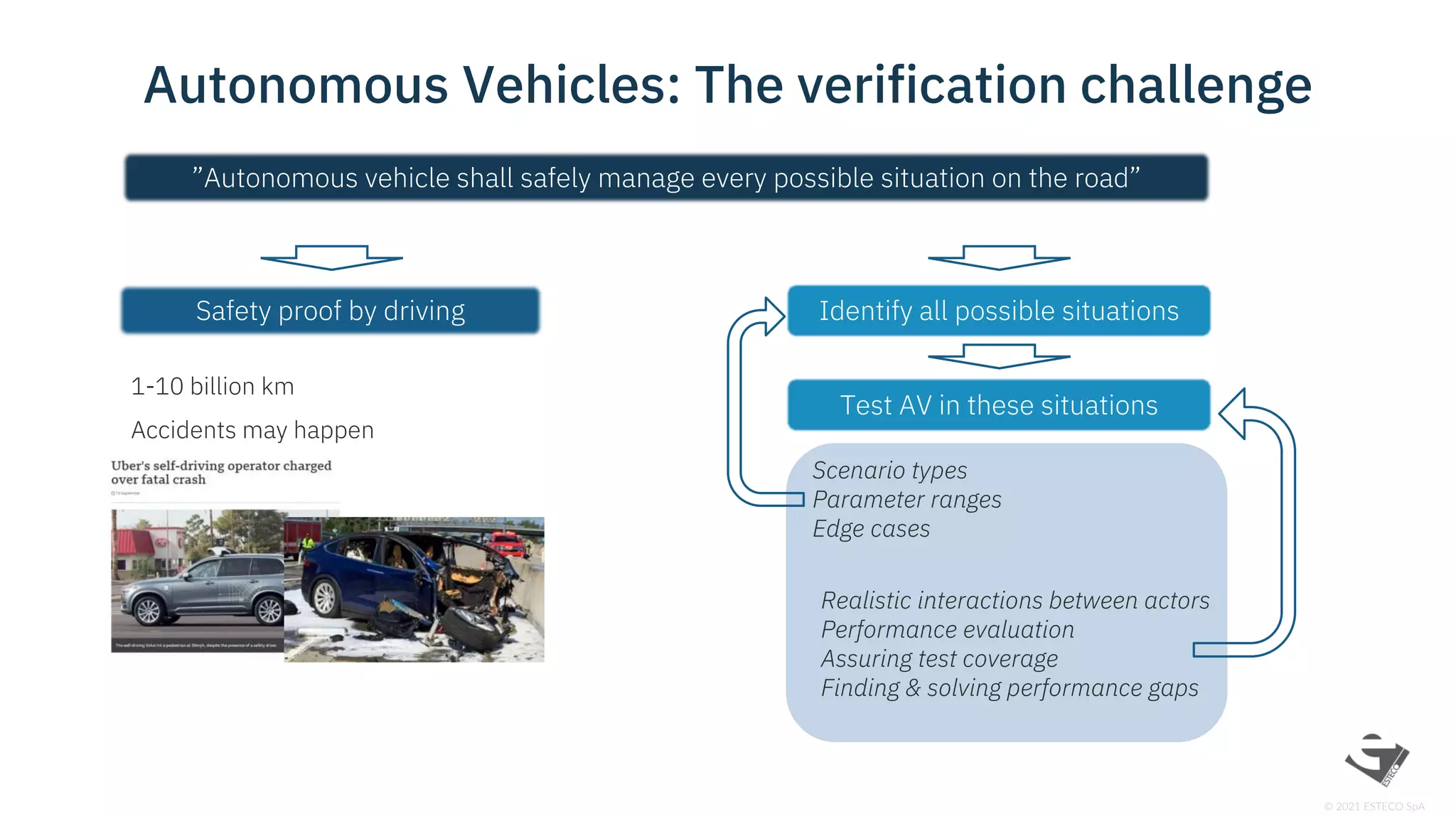
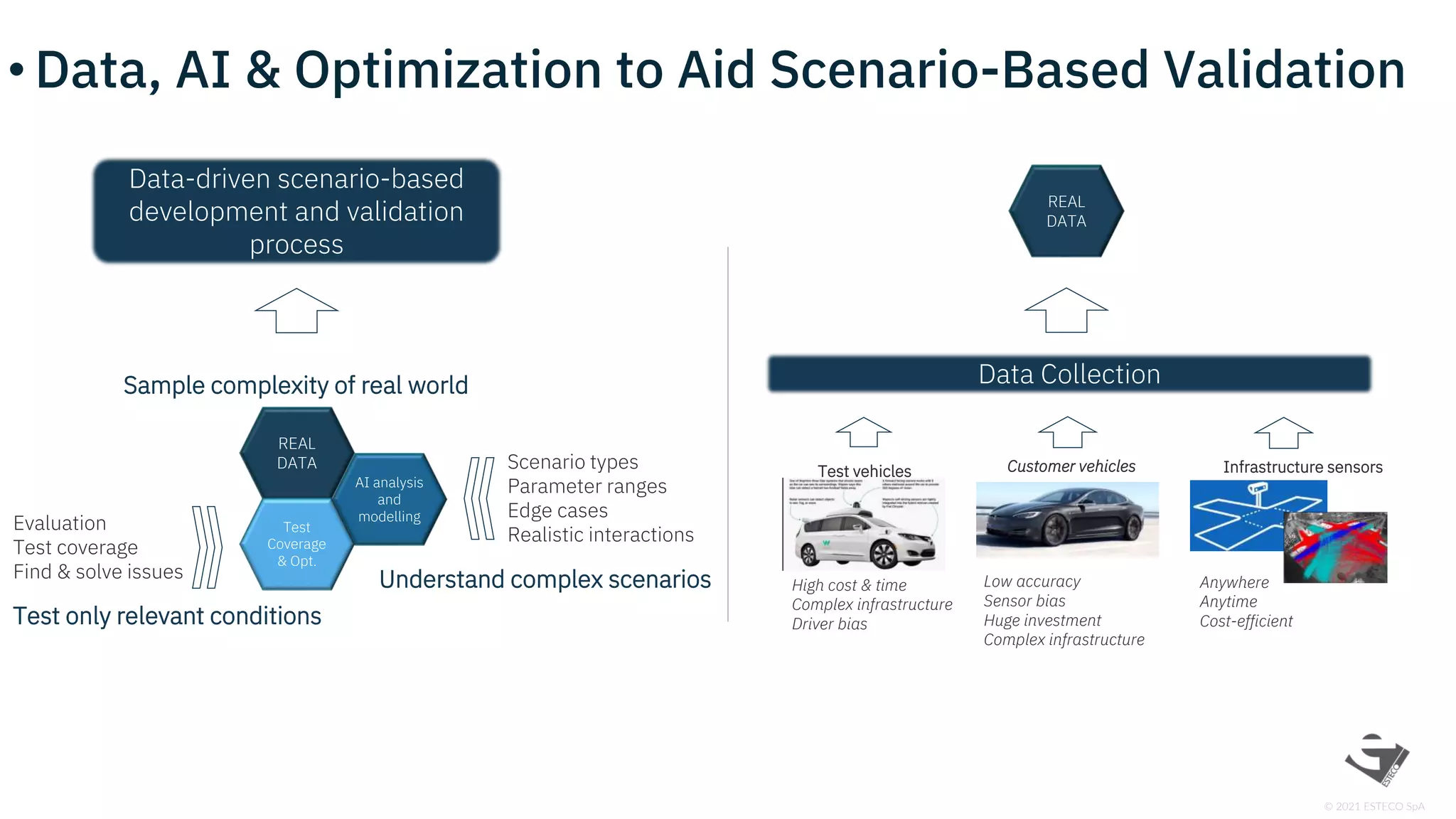
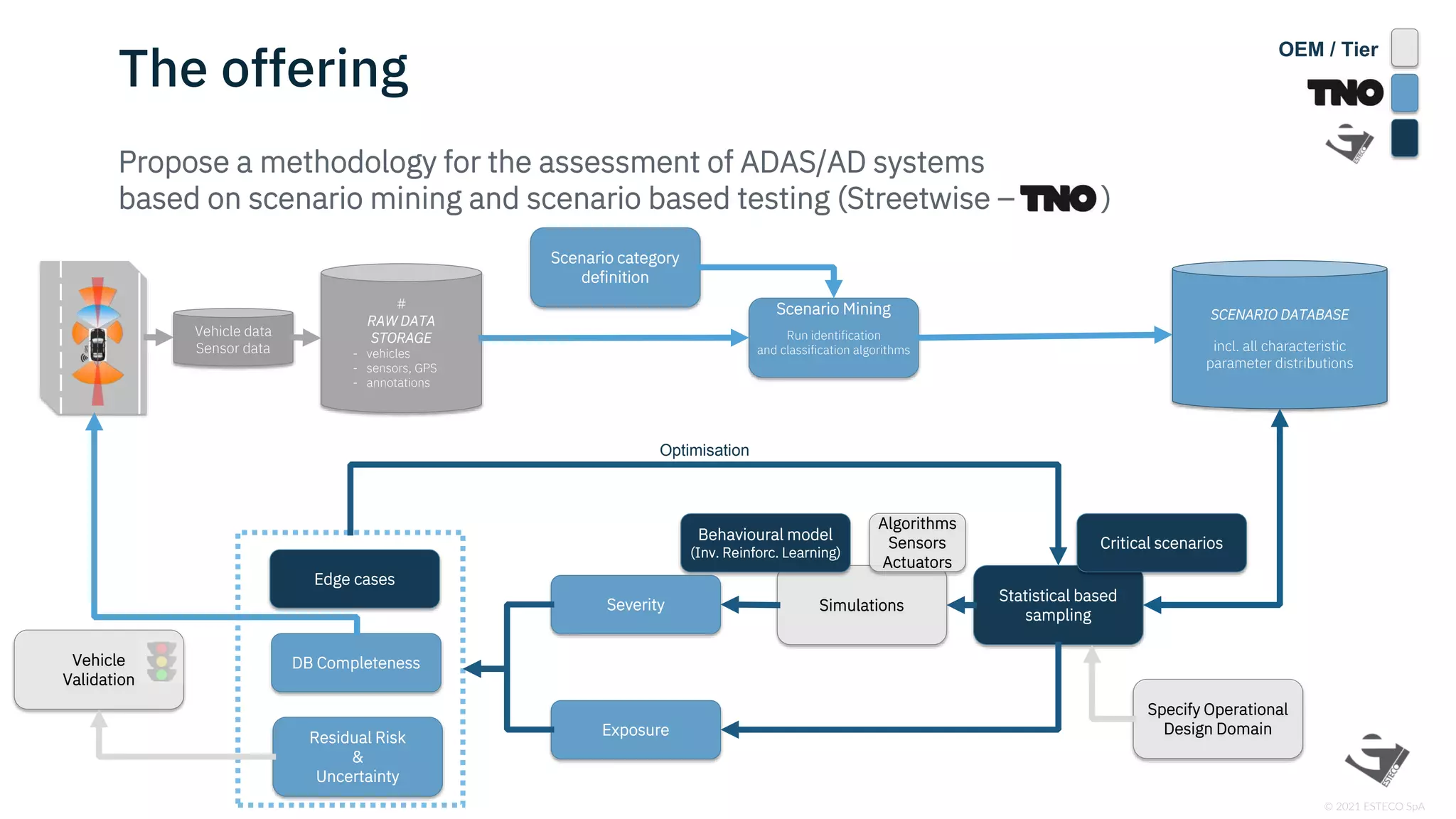
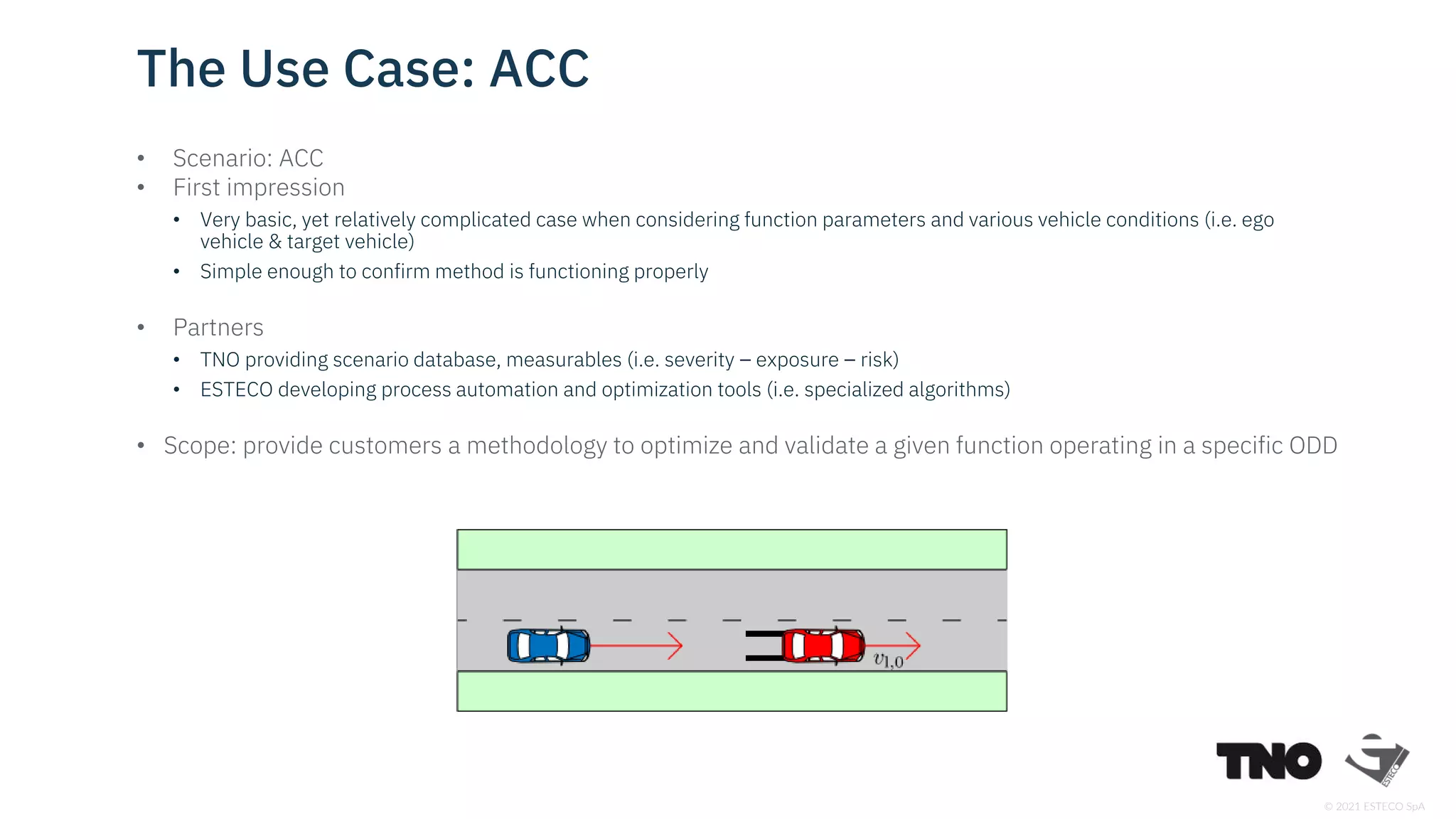
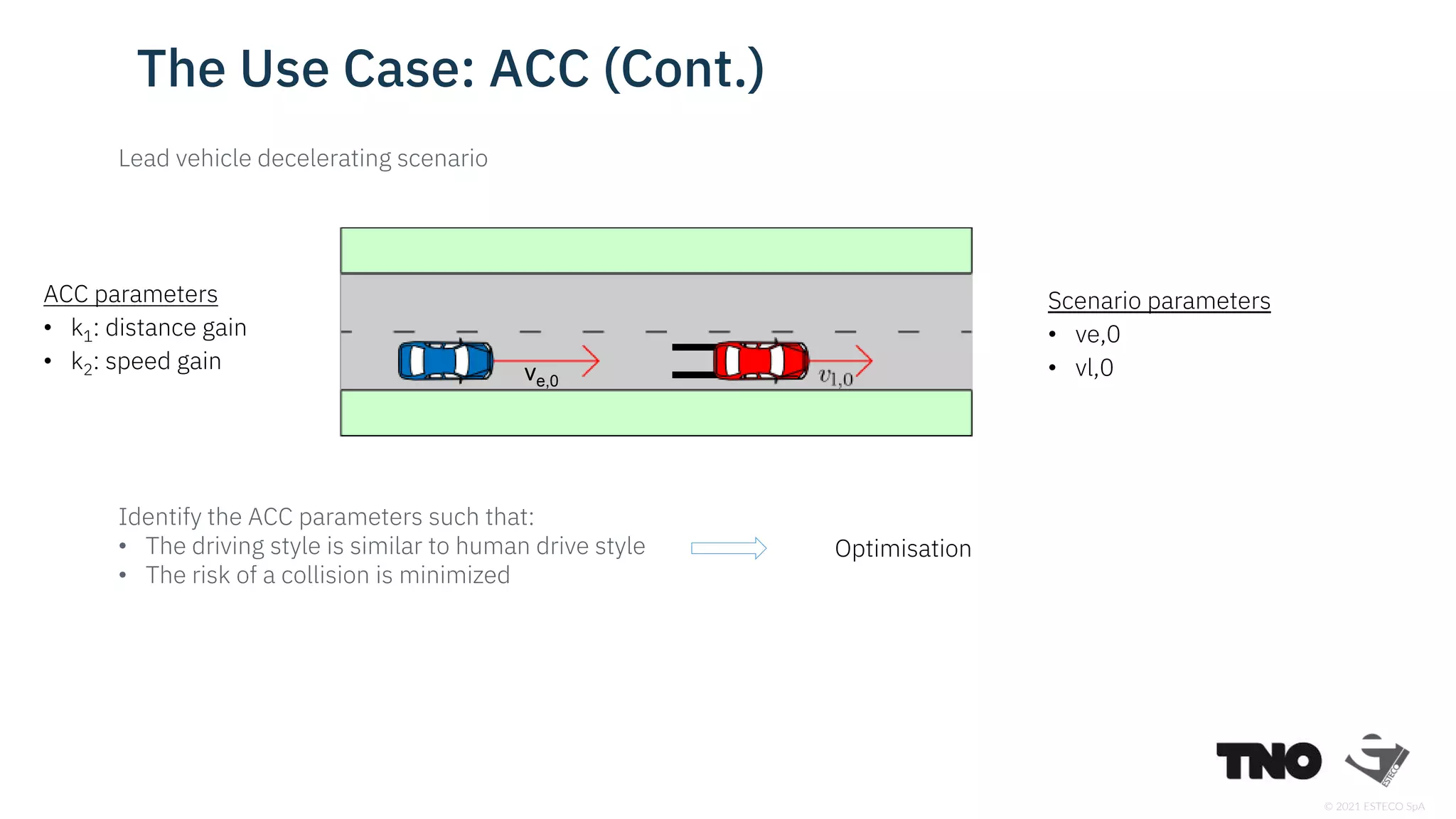
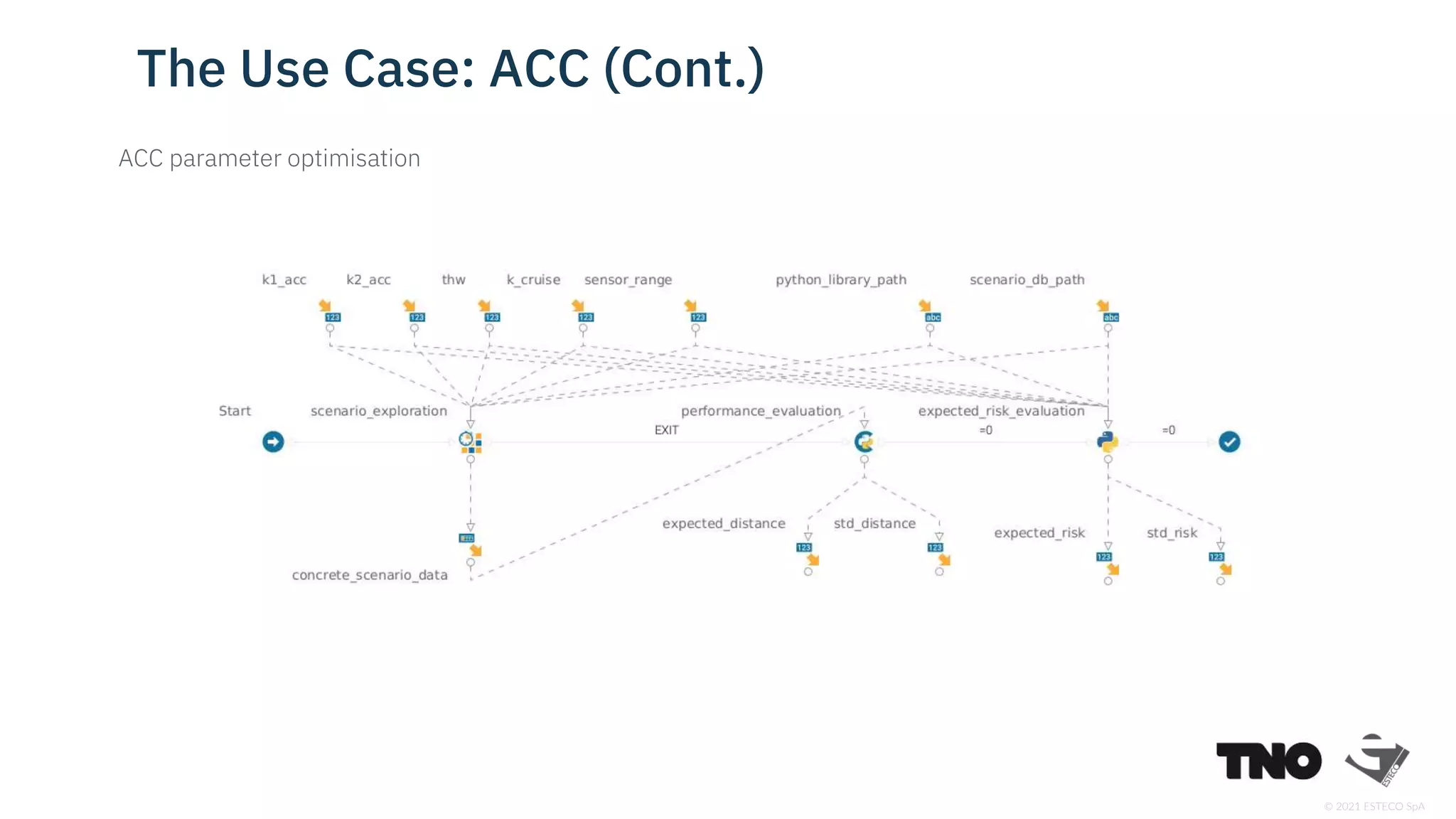
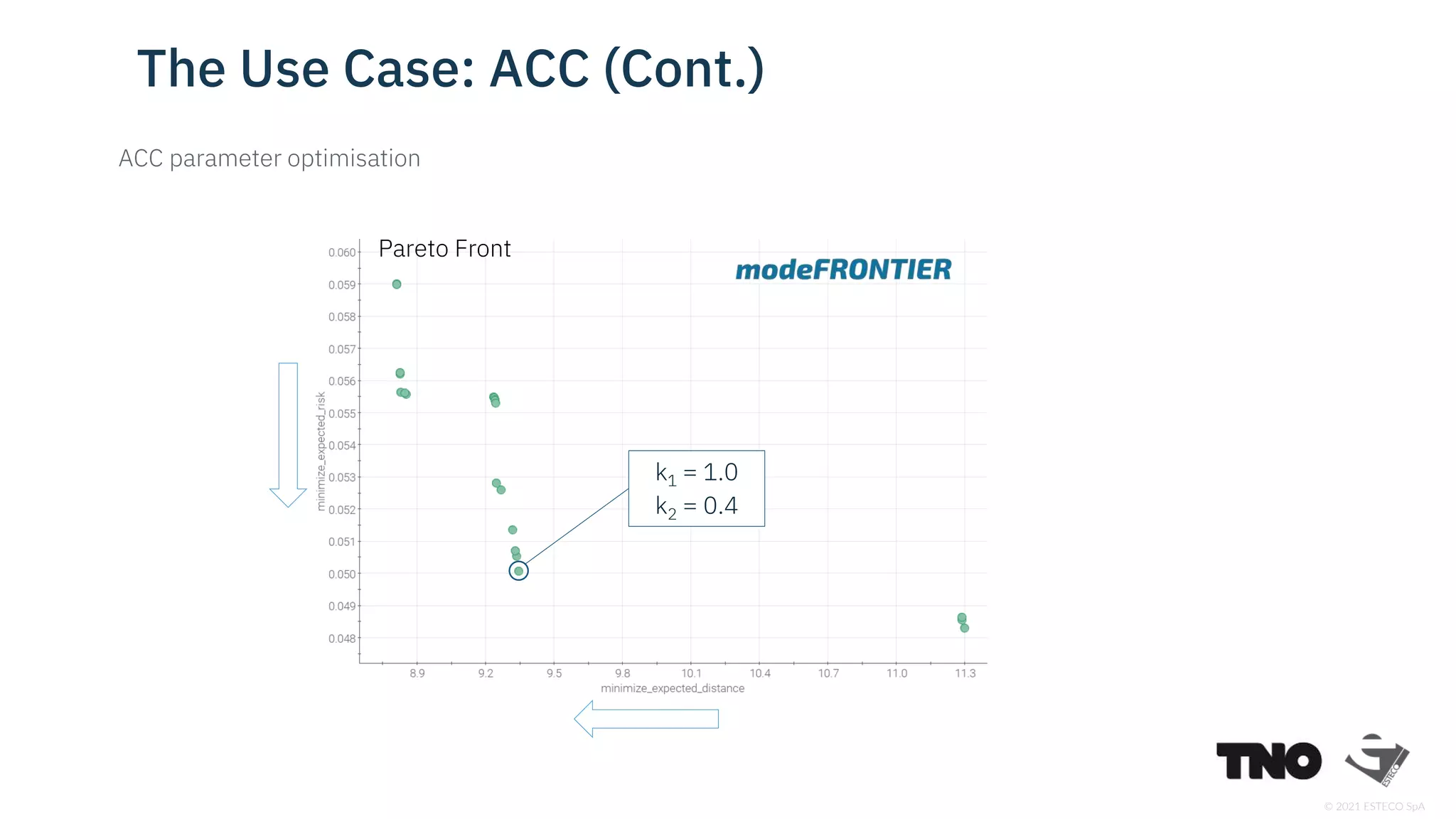
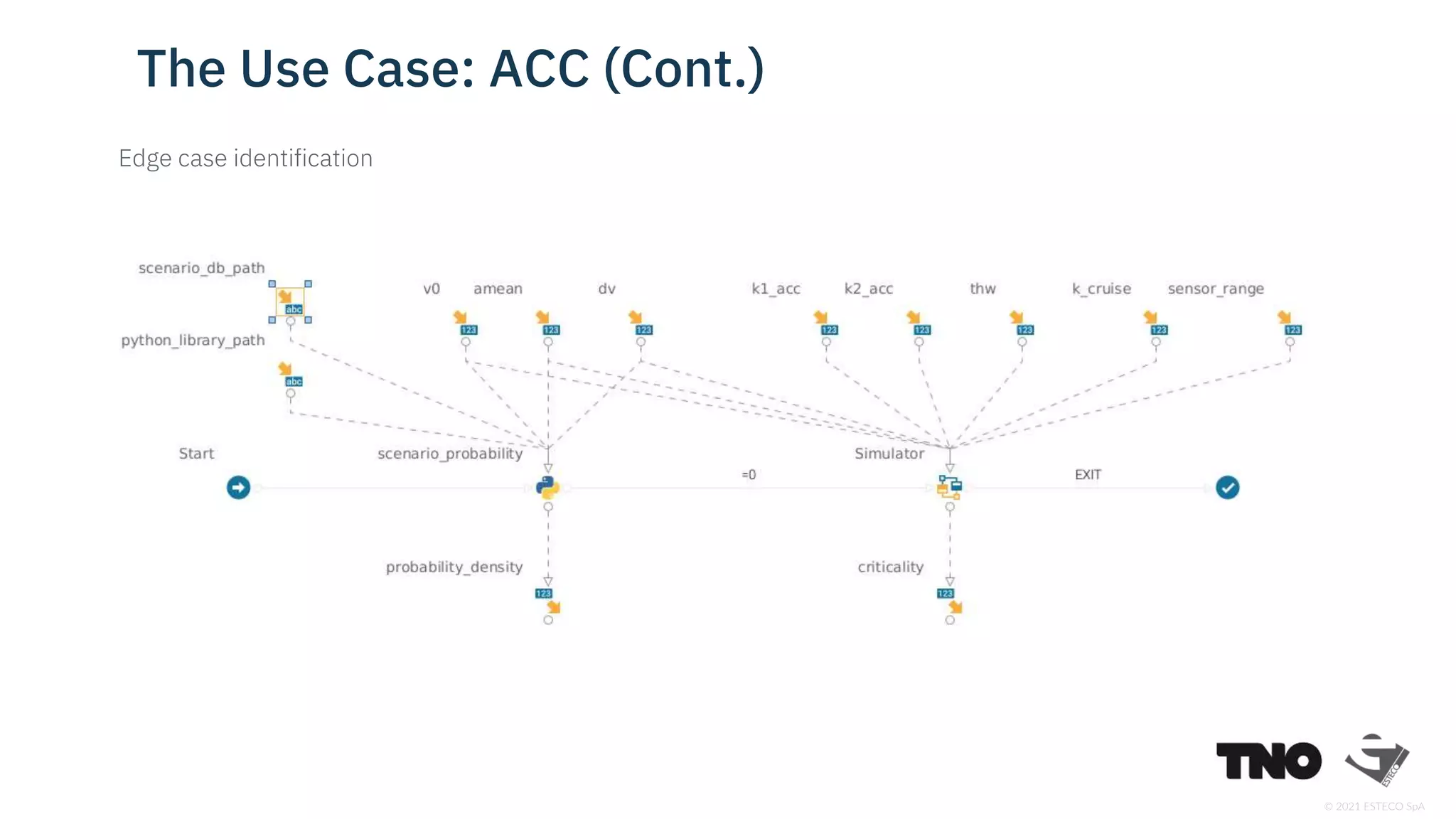
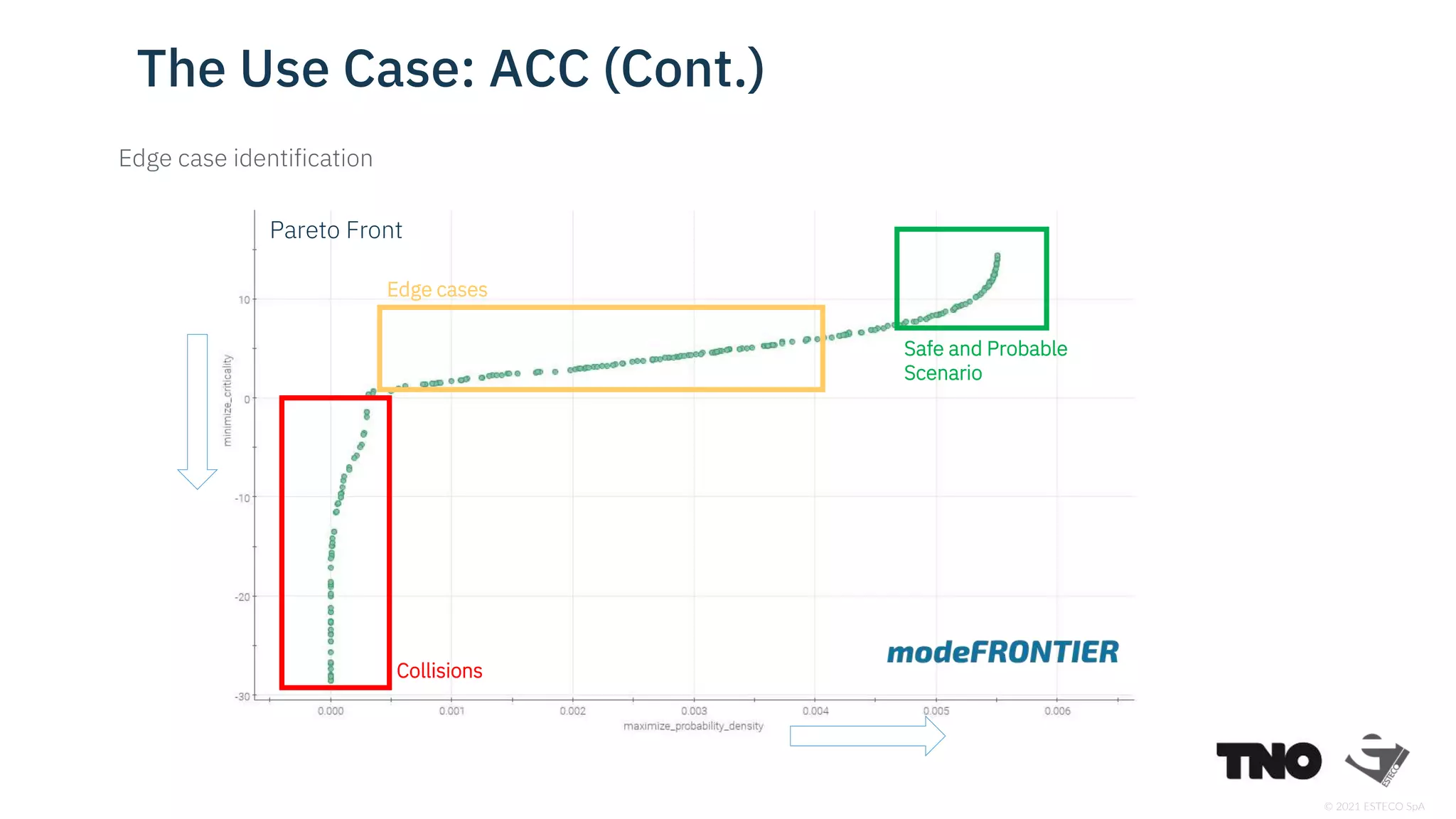
This document proposes a methodology for assessing autonomous vehicle performance using real-world data, artificial intelligence, and optimization. It uses scenario mining of sensor data to build a database of parameterized scenarios and distributions. Simulations are run to identify critical scenarios, optimize autonomous functions, and evaluate risk. This was applied to adaptive cruise control optimization, identifying edge cases, tuning control parameters, and evaluating safety performance. The approach aims to objectively validate functions using real-world data and optimize performance for autonomous systems' operational design domains.