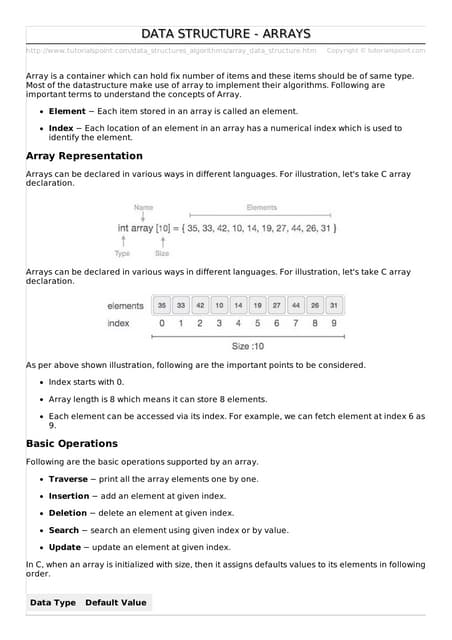
The document discusses different data structures and their properties. It explains that data structures can be linear or non-linear. Linear data structures like arrays have elements arranged in a sequence, while non-linear structures like trees and graphs do not. It then focuses on linear data structures and their representation in memory using arrays and linked lists. Key operations on linear structures like traversal, search, insertion and deletion are also summarized.
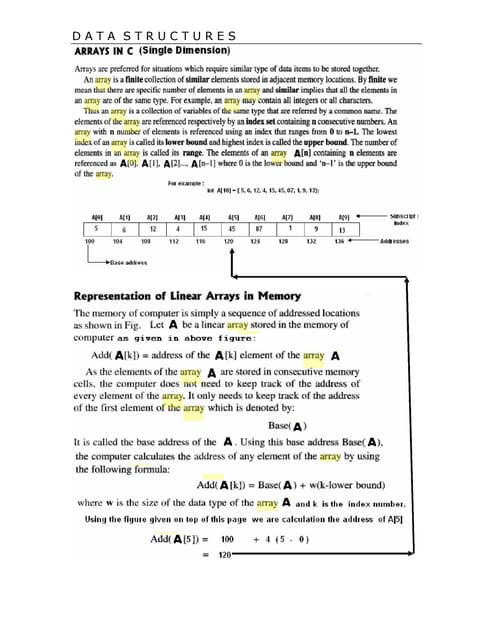
![REPRESENTATIONS IN MEMORY
As discussed earlier.
Computer does not keep track of each memory
location.
It only keeps track of the first memory location
of the array called BASE(LA).
Other memory locations are calculated by
formula:
LOC(LA[K])= base (LA) + w(k-lowerbound)
w=number of words per memory cell of array.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-9-2048.jpg)
![
Let LA be a linear array with N
elements. We want to insert an element
at Kth position.
1. Set J:=N.
2. Repeat steps 3 and 4 till J >=K
3. Set LA[J+1]:= LA[J]
4. Set J:=J-1
5. Set LA[K]:= ITEM.
6. Set N:=N+1](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-15-2048.jpg)
![DELETING
After deleting an element from Kth
position we will have to move each
element one position UP.
Let LA be a linear array with N number
of elements
1. Set ITEM:= LA[K].
2. Repeart for J=K to N-1.
3.Set LA[J] := LA[J+1].
4.Set N:= N-1](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-16-2048.jpg)
![BUBBLE SORT
Sorting means rearranging the elements
of array so that they are is
increasing/decreasing order.
Show an eg of sorting.
The concept behind bubble sort is that
suppose A is the array. First we
compare A[1] and A[2]. If A[1] is greater
than A[2] then we interchange the
positions of both, else not.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-17-2048.jpg)
![
Then we check A[2] and A[3]. If A[2] is
greater than A[3] then we interchange
their positions, else not.
So on till A[n]. this whole series of
comparison is called ONE PASS.
After completion of Pass 1, the largest
element will be at the end.
Means in Pass 1, N-1 comparisons
have been made.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-18-2048.jpg)
![
Here DATA us ab array with N elements.
1) Repeat steps 2 and 3 for K=1 to N-1.
(for keeping track of number of pass)
2) Set PTR:=1.
3) Repeat while PTR <= N-K(for
number of comparisons)
1) If DATA[PTR] > DATA[PTR-1], then
Interchange DATA[PTR] and
DATA[PTR+1].
1) Set PTR:=PTR+1
4) EXIT.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-20-2048.jpg)
![LINEAR SEARCH
Suppose DATA is a linear array with n
elements.
We want to search ITEM in DATA.
First we test whether DATA[1]=ITEM,
then we check whether DATA[2]=ITEM
and so on.
This method which traverses DATA
sequentially to loacate item is called
“linear search” or “sequential search”.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-23-2048.jpg)
![
We first insert ITEM to be searched at
DATA[n+1] location, ie, at the last
position of the array.
LOC denotes the location where ITEM
first occurs in DATA.
Means if at the end of algo we get LOC=
n+1, it means the search was
unsuccessful, cause WE have inserted
ITEM at n+1.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-24-2048.jpg)
![ALGO
1.Set DATA[N+1]= item.(insert at end)
2.Set LOC:=1
3.Repeat while DATA[LOC]!= ITEM.(search)
Set LOC:= LOC +1.
1.If LOC= N+1, Then set LOC:=0.
2.Exit.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-26-2048.jpg)

![BINARY SEARCH
Suppose data in array is sorted in
increasing numerical order.
There is an extremely efficient algo for
this called BINARY SEARCH.
Example of telephone directory.
Suppose following is the array DATA:
DATA[BEG], DATA[BEG+1], DATA[BEG+2],.....,
DATA[END].
Means we have to define a BEG and an END.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-29-2048.jpg)
![
During each stage our search is reduced
to a segment of DATA.
The algo compares ITEM with the
middle element DATA[MID] of the
segment, where MID =
int((BEG+END)/2).
INT used because we want an integer
value of MID.
If DATA[MID]= ITEM, then search is
successful, and LOC:=MID.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-30-2048.jpg)
![
Otherwise search is narrowed down to a
new segment, which is obtained as:
1. If ITEM< DATA[MID], then ITEM
appears in the left half, so reset END
as:
END= MID-1, and begin search again.
1. If ITEM> DATA[MID], then ITEM
appears in the right half, so reset BEG
as:
BEG= MID+1, and begin search
again.
First we begin with BEG=LB n END=UB.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-31-2048.jpg)
![1. Set BEG=LB, END=UB,
MID=int((BEG+END)/2).
2.Repeat steps 3 and 4 while BEG<=END and
DATA[MID]!=ITEM.
3. If ITEM < DATA[MID], then:
Set END:= MID - 1.
Else
Set BEG= MID + 1.
1. Set MID = int((BEG+END)/2).](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-33-2048.jpg)
![1. If DATA[MID] = ITEM, then
Set LOC=MID
Else
Set LOC=NULL.
1.END
When item doesnot appear in DATA, the
algorithm eventually arrives at a position
where BEG=END=MID.](https://image.slidesharecdn.com/15954arraysfinal-151213093747/75/arrays-34-2048.jpg)