Arduino adalah platform prototipe open-source berbasis mikrokontroler Atmel AVR yang memungkinkan pemrograman yang lebih mudah. Meskipun banyak library membuat kode lebih dapat dipahami, hal ini dapat mengurangi pemahaman mendalam pengguna tentang mikrokontroler. Dokumentasi ini mencakup berbagai fitur dan pengaturan untuk pemrograman Arduino, termasuk konfigurasi timer dan penggunaan interrupt.














![SERIAL READ – PARSE / SPLIT DATA
FUNCTION :
String getValue(String data, char separator, int index)
{
int found = 0;
int strIndex[] = { 0, -1 };
int maxIndex = data.length() - 1;
for (int i = 0; i <= maxIndex && found <= index; i++){
if (data.charAt(i) == separator || i == maxIndex){
found++;
strIndex[0] = strIndex[1] + 1;
strIndex[1] = (i == maxIndex) ? i + 1 : i;
}
}
return found>index ? data.substring(strIndex[0], strIndex[1]) : "";
}](https://image.slidesharecdn.com/arduino-170219183228/85/Arduino-Basic-19-320.jpg)






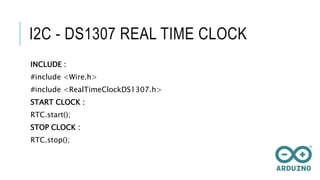
![TIMER – INTERRUPT CTC
Langkah selanjutnya menentukan CTC value. Untuk menentukannya
dapat menggunakan rumus :
compare match register = [ 16,000,000Hz/ (prescaler * desired
interrupt frequency) ] – 1
Nilai dari CTC untuk timer0 dan timer2 adalah 8 Bit yang artinya
diantara 0 – 255
Nilai dari CTC untuk timer1 adalah 16 bit yang artinya diantara 0 -
65536](https://image.slidesharecdn.com/arduino-170219183228/85/Arduino-Basic-26-320.jpg)






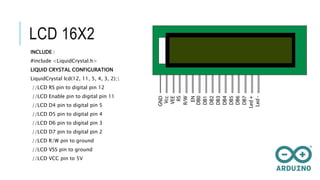
![CONTOH KONFIGURASI
Timer mengunakan timer 0 dengan interrupt CTC setiap 2 ms
Frekuensi interrupt = 1/(2 * 10^-3) ms =1000/2 = 500 Hz
compare match register = [ 16,000,000Hz/ (prescaler * desired
interrupt frequency) ] – 1
Prescaler ditentukan 1024
CTC Value = [16000000/(1024*500)]-1
= 30.5 = 30
Maka OCR0A = 30;](https://image.slidesharecdn.com/arduino-170219183228/85/Arduino-Basic-33-320.jpg)

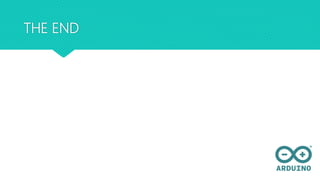
![CONTOH KONFIGURASI 2
Timer mengunakan timer 0 dengan interrupt CTC setiap 1 s
Frekuensi interrupt = 1/1 = 1 Hz
compare match register = [ 16,000,000Hz/ (prescaler * desired interrupt
frequency) ] – 1
Prescaler ditentukan 1024
CTC Value = [16000000/(1024*1)]-1
= 15624
Value CTC lebih besar dari 255 maka untuk konfigurasi ini tidak dapat
menggunakan timer0. untuk itu memerlukan timer dengan nilai CTC yang
lebih besar yaitu timer1 16 bit](https://image.slidesharecdn.com/arduino-170219183228/85/Arduino-Basic-35-320.jpg)






![CONTOH KONFIGURASI 2
Timer mengunakan timer 1 dengan interrupt CTC setiap 1 s
Frekuensi interrupt = 1/1 = 1 Hz
compare match register = [ 16,000,000Hz/ (prescaler * desired
interrupt frequency) ] – 1
Prescaler ditentukan 1024
CTC Value = [16000000/(1024*1)]-1
= 15624](https://image.slidesharecdn.com/arduino-170219183228/85/Arduino-Basic-43-320.jpg)









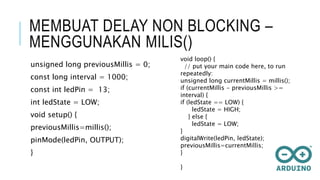
![MEMBUAT INTERRUPT SETIAP 1 MS
Timer mengunakan timer 0 dengan interrupt CTC setiap 1 ms
Frekuensi interrupt = 1/(1 * 10^-3) ms =1000/1 = 1000 Hz
compare match register = [ 16,000,000Hz/ (prescaler * desired
interrupt frequency) ] – 1
Prescaler ditentukan 256
CTC Value = [16000000/(256*1000)]-1
= 62.5 = 63
Maka OCR0A = 63;](https://image.slidesharecdn.com/arduino-170219183228/85/Arduino-Basic-54-320.jpg)