Download to read offline
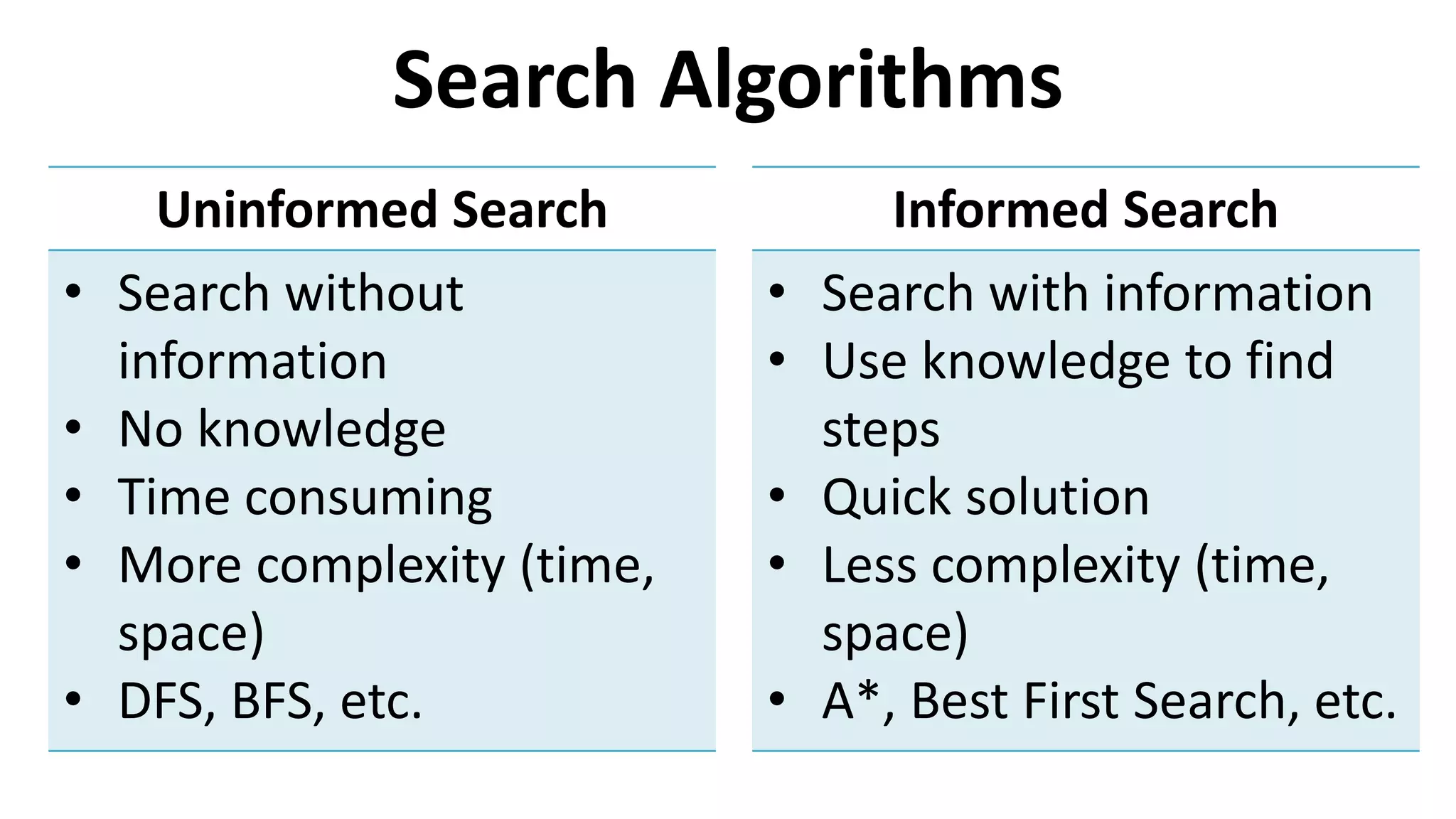
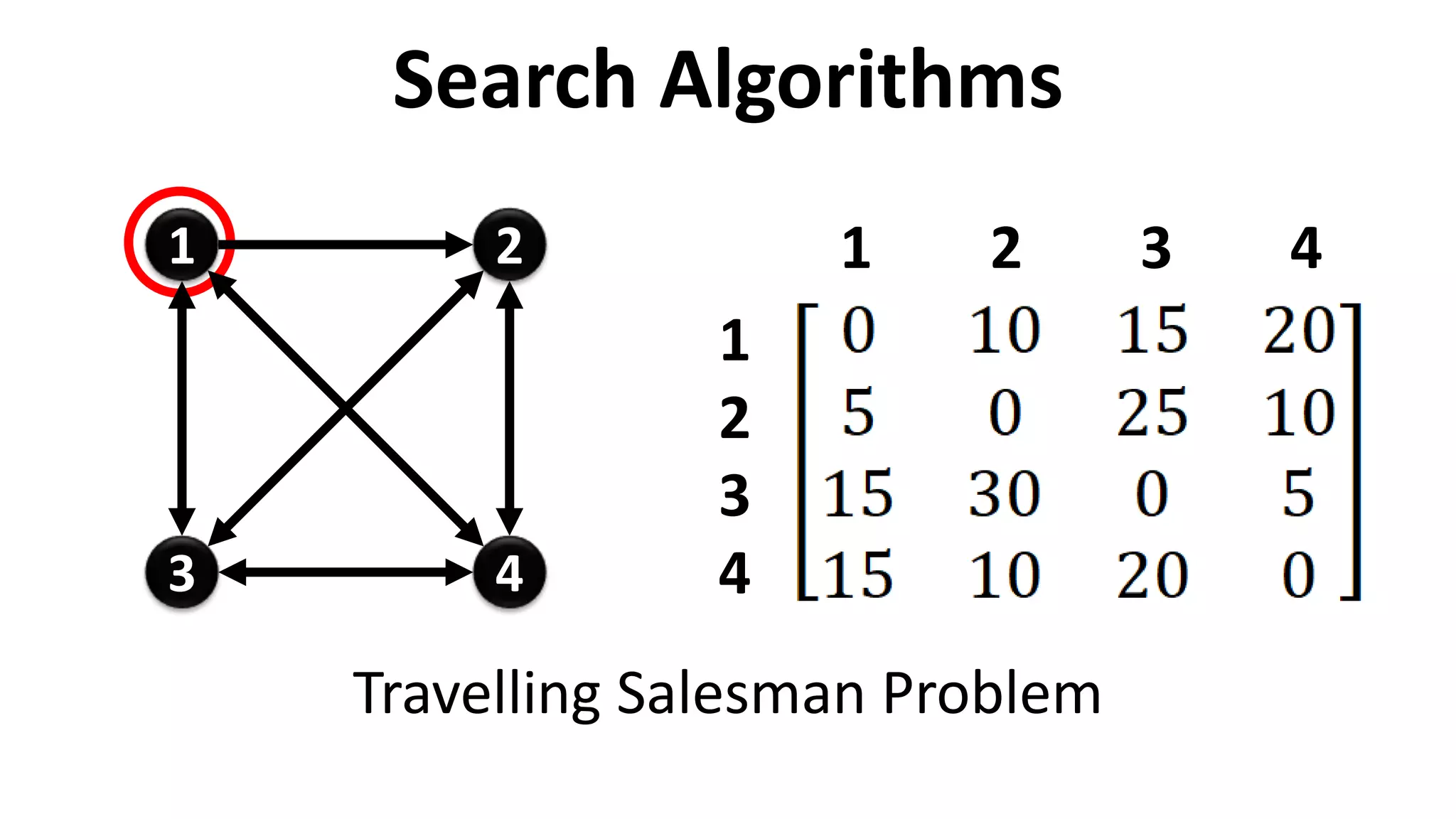
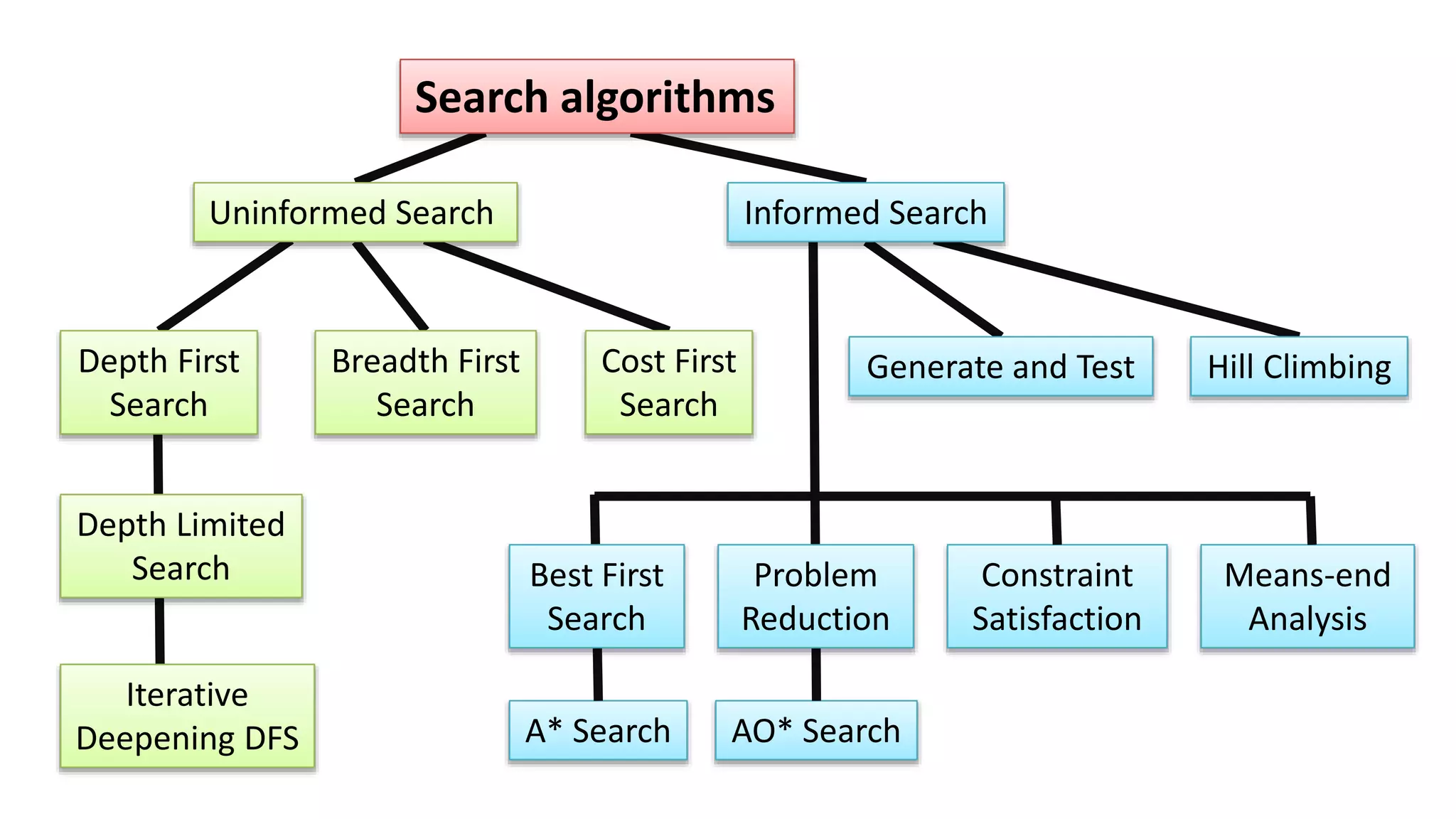
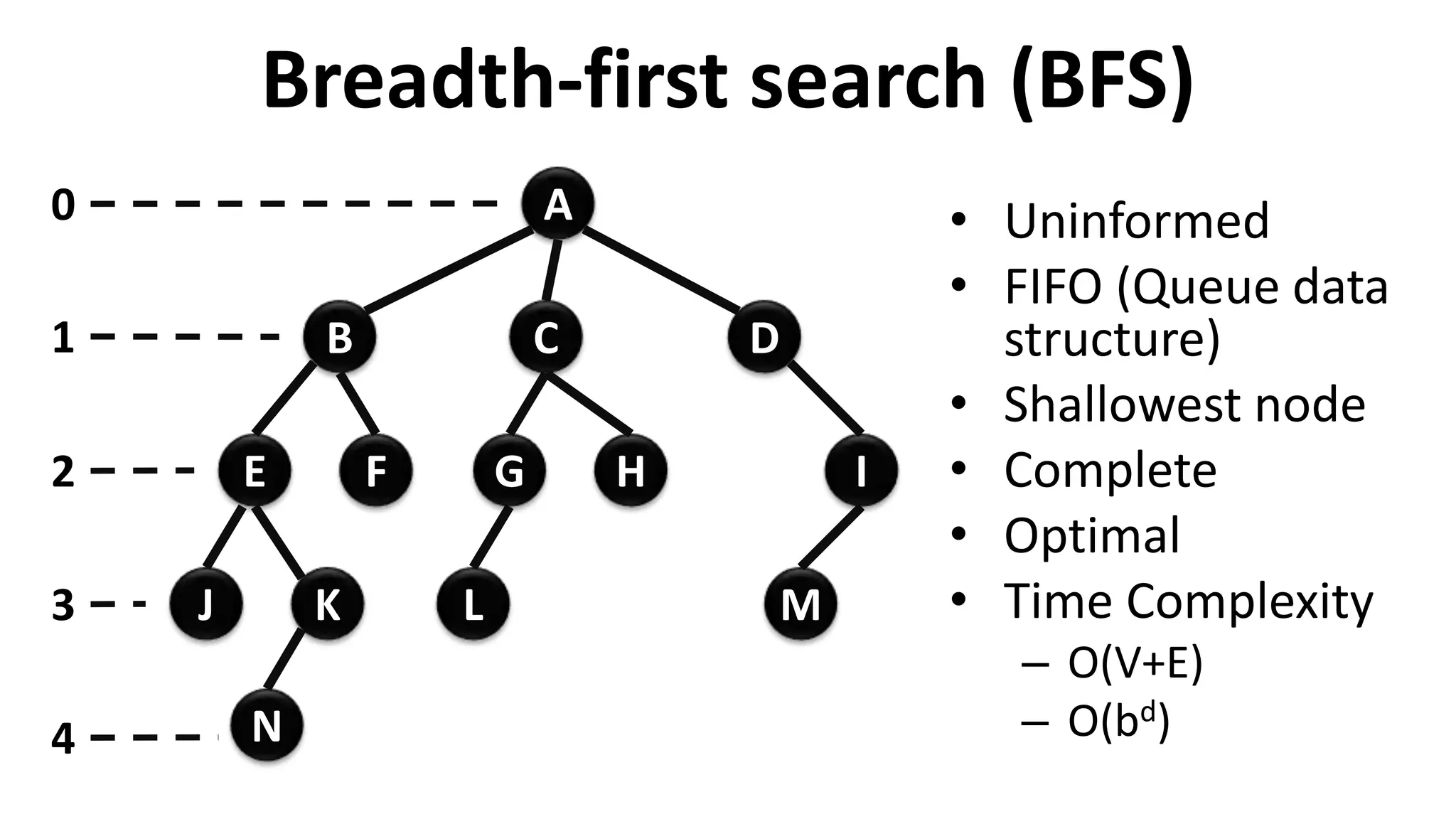
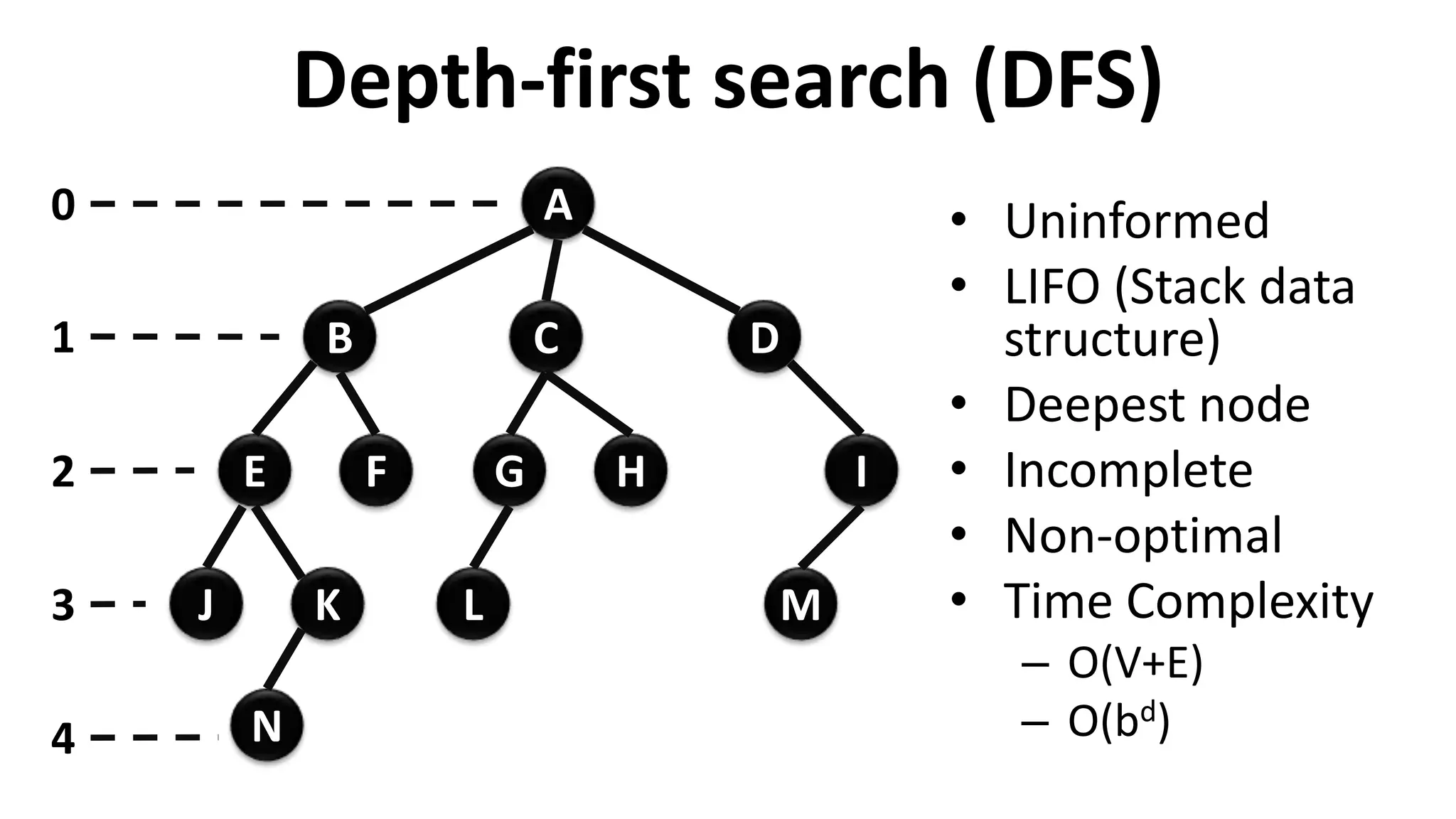
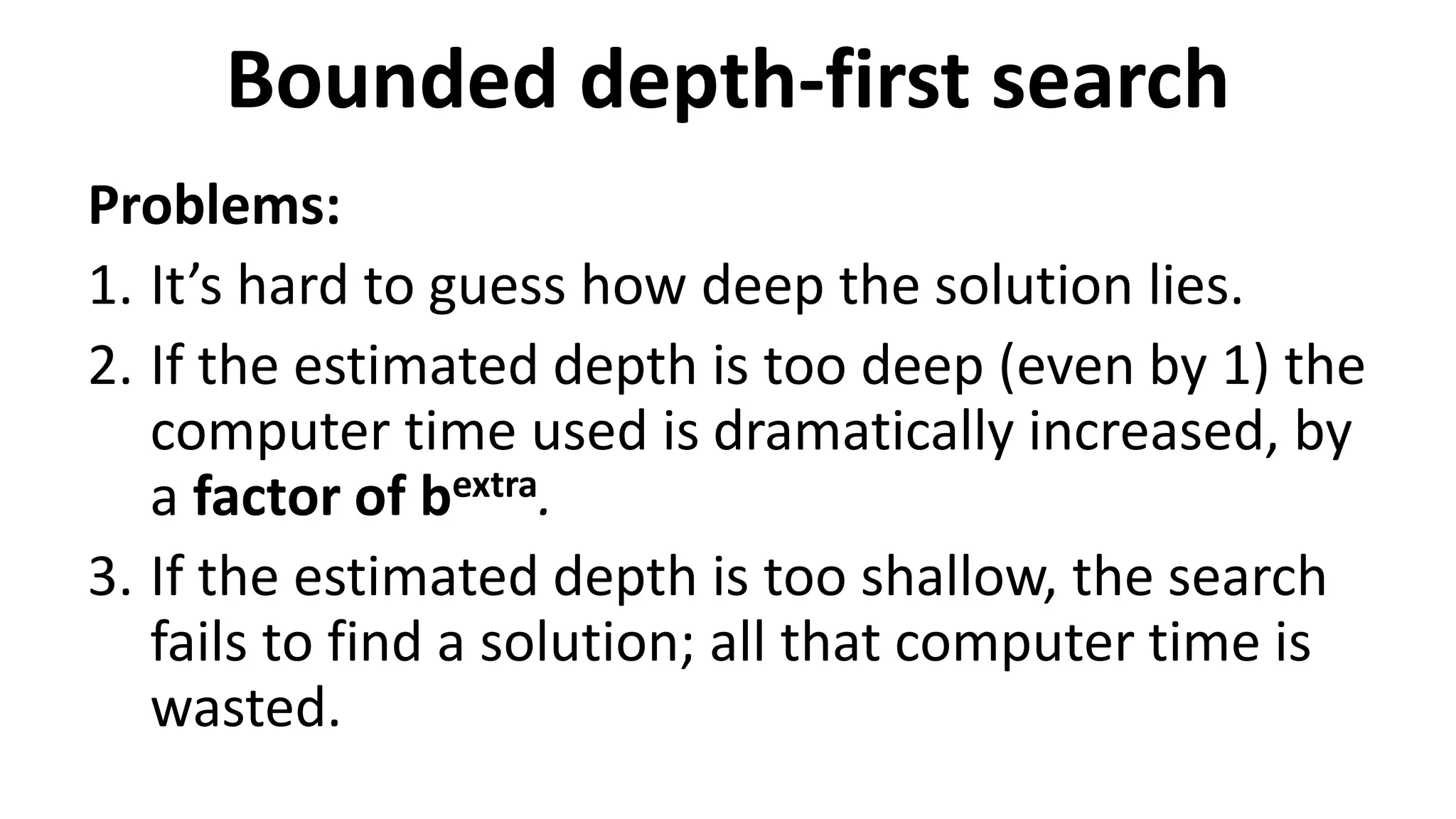
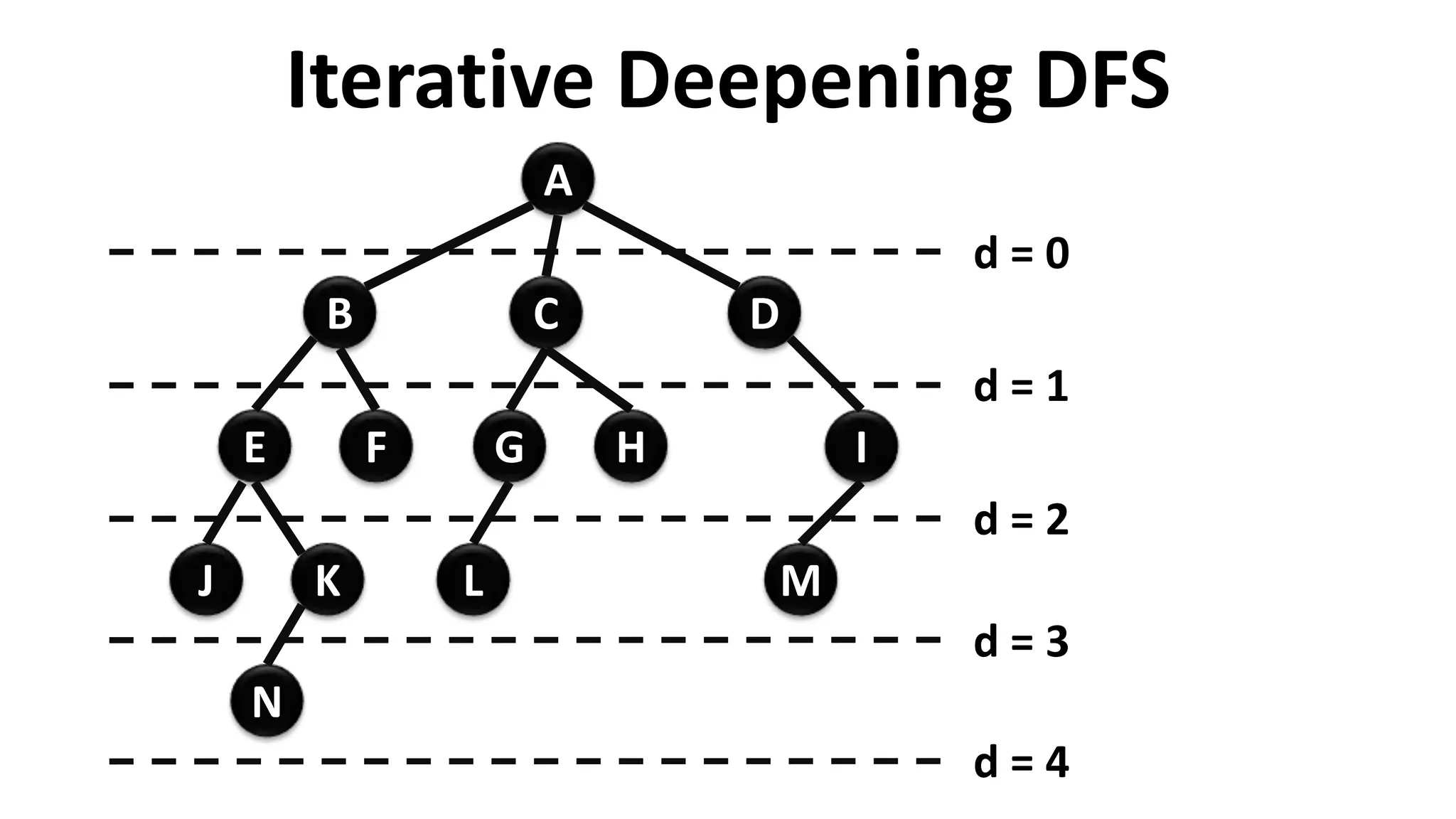
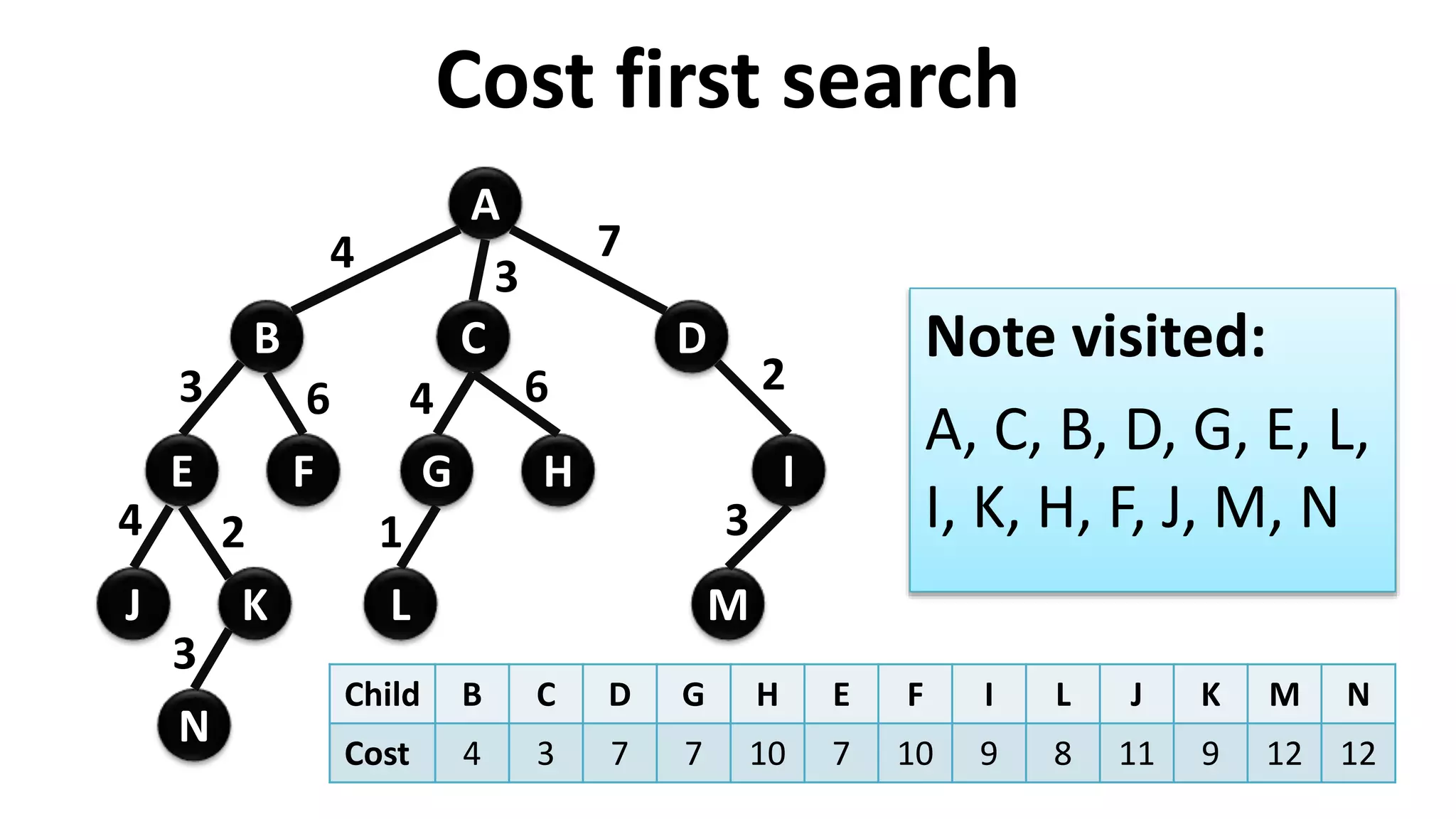

The document discusses various search algorithms used in artificial intelligence, categorized into uninformed and informed searches. It highlights key strategies such as breadth-first search (BFS) and depth-first search (DFS), detailing their advantages, disadvantages, and complexities. Additionally, the document touches on concepts like the travelling salesman problem and constraint satisfaction.