The document discusses various algorithms that use dynamic programming. It begins by defining dynamic programming as an approach that breaks problems down into optimal subproblems. It provides examples like knapsack and shortest path problems. It describes the characteristics of problems solved with dynamic programming as having optimal subproblems and overlapping subproblems. The document then discusses specific dynamic programming algorithms like matrix chain multiplication, string editing, longest common subsequence, shortest paths (Bellman-Ford and Floyd-Warshall). It provides explanations, recurrence relations, pseudocode and examples for these algorithms.

![12
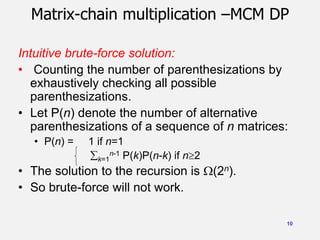
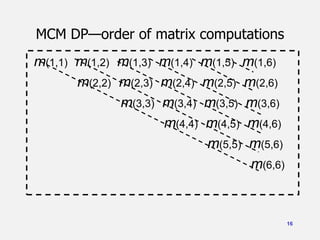
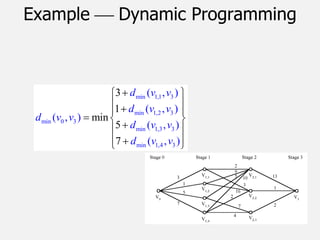
MCP DP Steps
• Step 2: a recursive relation
• Let m[i,j] be the minimum number of
multiplications for AiAi+1…Aj
• m[1,n] will be the answer
If the final multiplication for Aij is Aij= AikAk+1,j
then
• m[i,j] = 0 if i = j
min {m[i,k] + m[k+1,j] +pi-1pkpj } if i<j
ik<j](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-12-320.jpg)
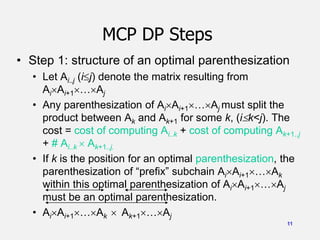
![Step 3: Algorithm
• Array m[1..n,1..n], with m[i,j] records the
optimal cost for AiAi+1…Aj .
• Array s[1..n,1..n], s[i,j] records index k
which achieved the optimal cost when
computing m[i,j].
• Suppose the input to the algorithm is p=<
p0 , p1 ,…, pn >.](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-14-320.jpg)
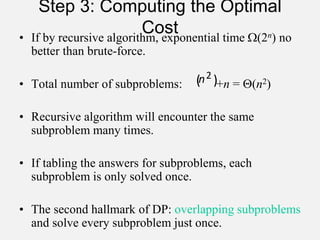
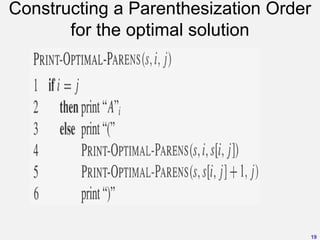
![MCM DP Steps
• Step 4, constructing a parenthesization
order for the optimal solution.
• Since s[1..n,1..n] is computed, and s[i,j] is
the split position for AiAi+1…Aj , i.e, Ai…As[i,j]
and As[i,j] +1…Aj , thus, the parenthesization
order can be obtained from s[1..n,1..n]
recursively, beginning from s[1,n].](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-18-320.jpg)
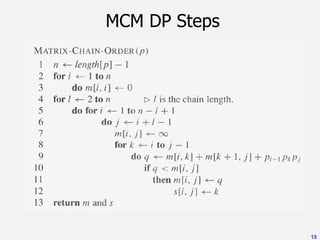
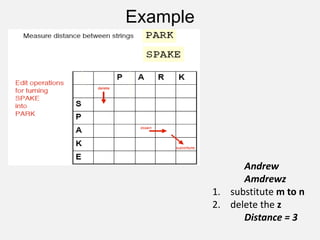
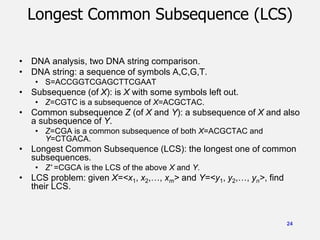
![String Editing
• Two string are given: X= x₁, x₂, x₃,…,xn and
Y=y₁, y₂, …, ym.
– xi, 1<i<n and yj, 1<j<m are members of Alphabet, a
finite set of symbols.
• Transform X into Y using a sequence of edit
operations on X.
• Set of Edit operations available: Insert[I(xi)],
Delete[D(xi)] and Change[C(xi, yj)].
• Cost associated with each operation.
• Total cost of the sequence of operations is the
sum of cost of each edit operation in sequence.
• Problem: Identify a minimum-cost edit sequence
that transforms X into Y.](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-20-320.jpg)
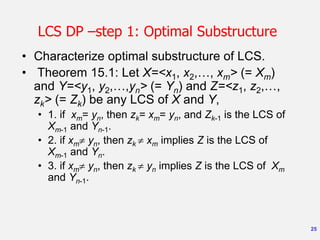
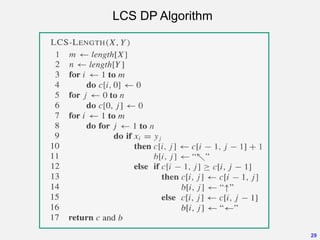
![26
LCS DP –step 2:Recursive Solution
• What the theorem says:
• If xm= yn, find LCS of Xm-1 and Yn-1, then append xm.
• If xm yn, find LCS of Xm-1 and Yn and LCS of Xm and Yn-
1, take which one is longer.
• Overlapping substructure:
• Both LCS of Xm-1 and Yn and LCS of Xm and Yn-1 will
need to solve LCS of Xm-1 and Yn-1.
• c[i,j] is the length of LCS of Xi and Yj .](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-26-320.jpg)
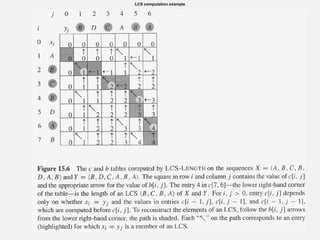
![27
LCS DP-- step 3:Computing the Length of LCS
• c[0..m,0..n], where c[i,j] is defined as
above.
• c[m,n] is the answer (length of LCS).
• b[1..m,1..n], where b[i,j] points to the
table entry corresponding to the optimal
subproblem solution chosen when
computing c[i,j].
• From b[m,n] backward to find the LCS.](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-27-320.jpg)
![Dijikstra’s Shortest Path Algorithm
DIJKSTRA (G, w, s)
{
INITIALIZE SINGLE-SOURCE (G, s)
S ← { } // S will ultimately contains vertices of final
shortest-path weights from s
Initialize priority queue Q i.e., Q ← V[G]
while priority queue Q is not empty do
u ← MIN(Q) // Pull out new vertex
S ← S + {u}
// Perform relaxation for each vertex v adjacent to u
for each vertex v in Adj[u] do
Relax (u, v, w)
}
37](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-37-320.jpg)
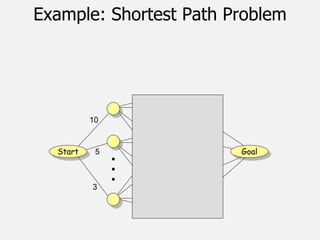
![The All-Pairs Shortest Path Problem:
Floyd-Marshall Algorithm
• Input: A weighted graph, represented by its
weight matrix W.
• Problem: Find the distance between every pair of
nodes.
• Dynamic programming Design:
– Notation: A(k)(i,j) = length of the shortest path from
node i to node j where the label of every intermediary
node is <= k.
• A(0)(i,j) = W[i,j].](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-46-320.jpg)
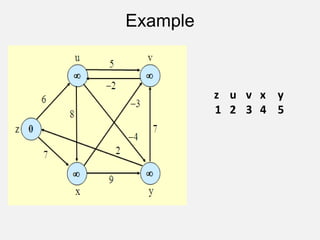
![• The shortest path in the two groups is the
shorter of the shortest paths of the two groups,
we get
• The algorithm follows:
A(k)(i,j)=min(A(k-1)(i,j), A(k-1)(i,k) + A(k-1)(k,j))
Algorithm AllPaths(cost, a, n)
{
for i=1 to n do
for j=1 to n do
A(0)(i,j) := cost[i,j];
for k=1 to n do
for i=1 to n do
for j=1 to n do
A(k)(i,j)=min(A(k-1)(i,j),A(k-1)(i,k) + A(k-1)(k,j))
}](https://image.slidesharecdn.com/aacch3advancestrategiesdynamicprogramming-221129141504-758f43ce/85/AAC-ch-3-Advance-strategies-Dynamic-Programming-pptx-49-320.jpg)