Downloaded 22 times
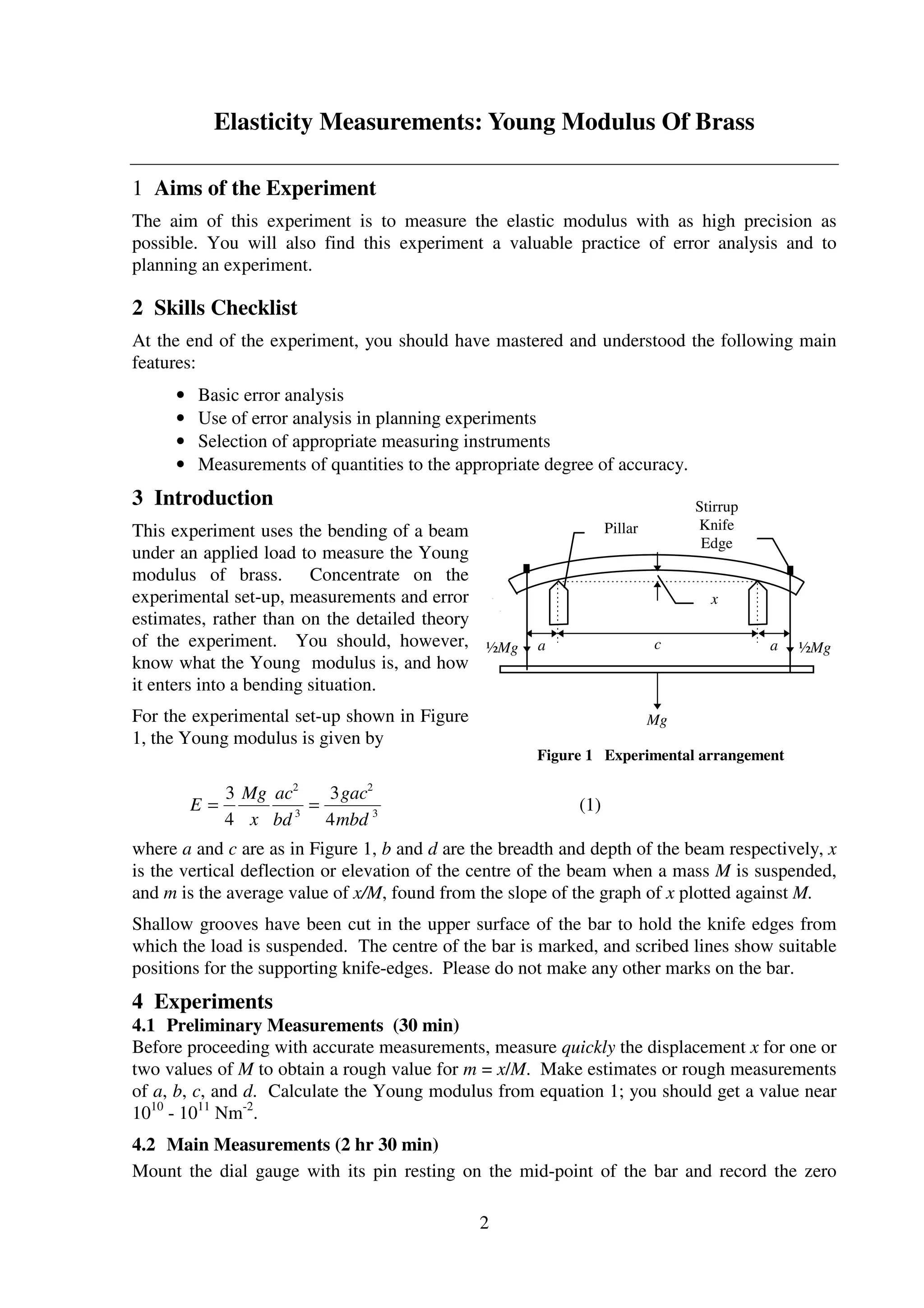
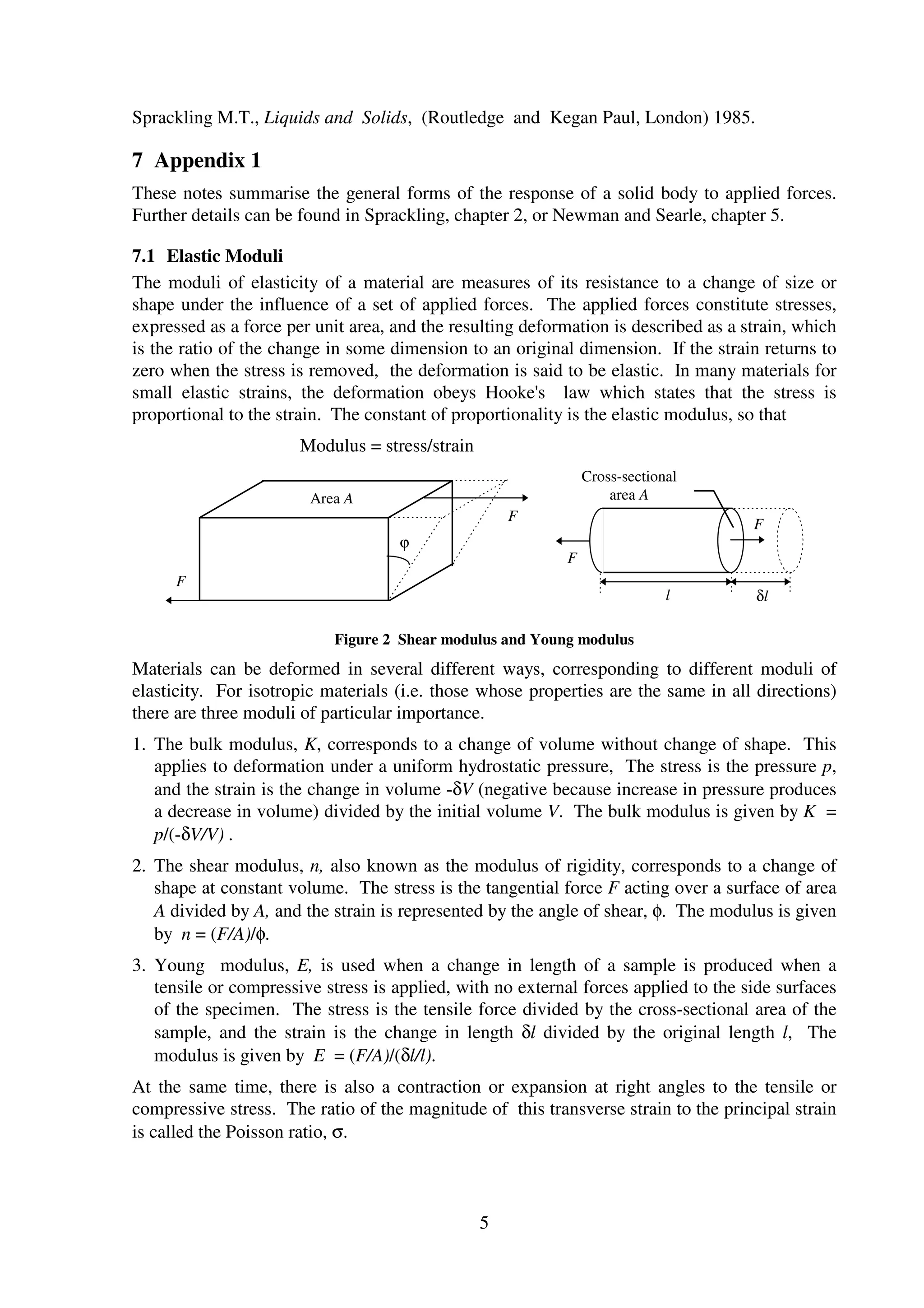

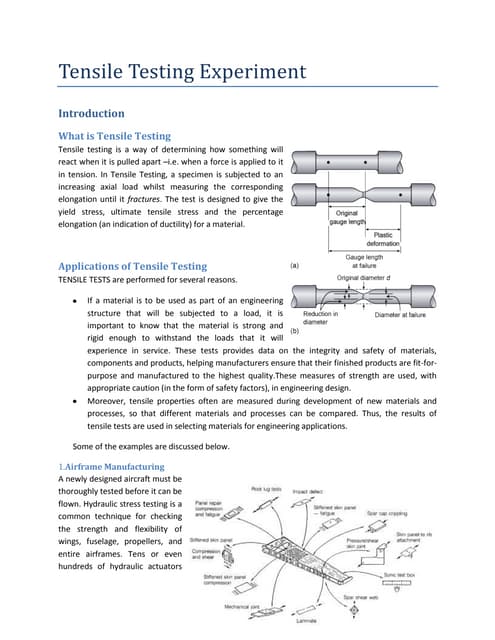
The document provides instructions for an experiment to measure the Young's modulus of brass using beam bending. Students are asked to: 1) Take preliminary measurements of a beam's deflection under different loads to estimate the Young's modulus. 2) Precisely measure the beam's deflection under varying loads and use the slope of a deflection vs. load graph to calculate Young's modulus. 3) Use error analysis to plan further measurements of beam dimensions to achieve a desired accuracy for calculating Young's modulus.