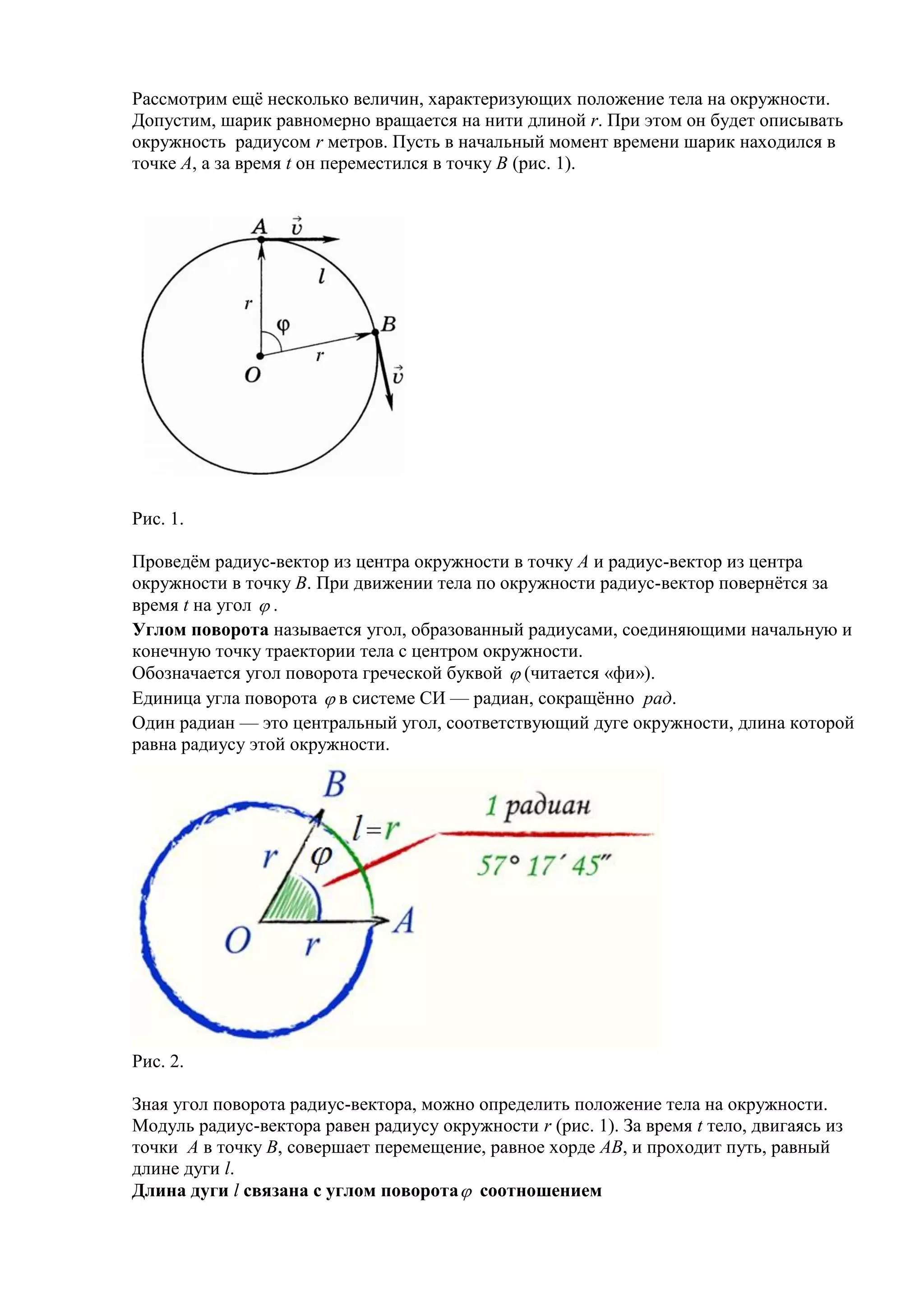
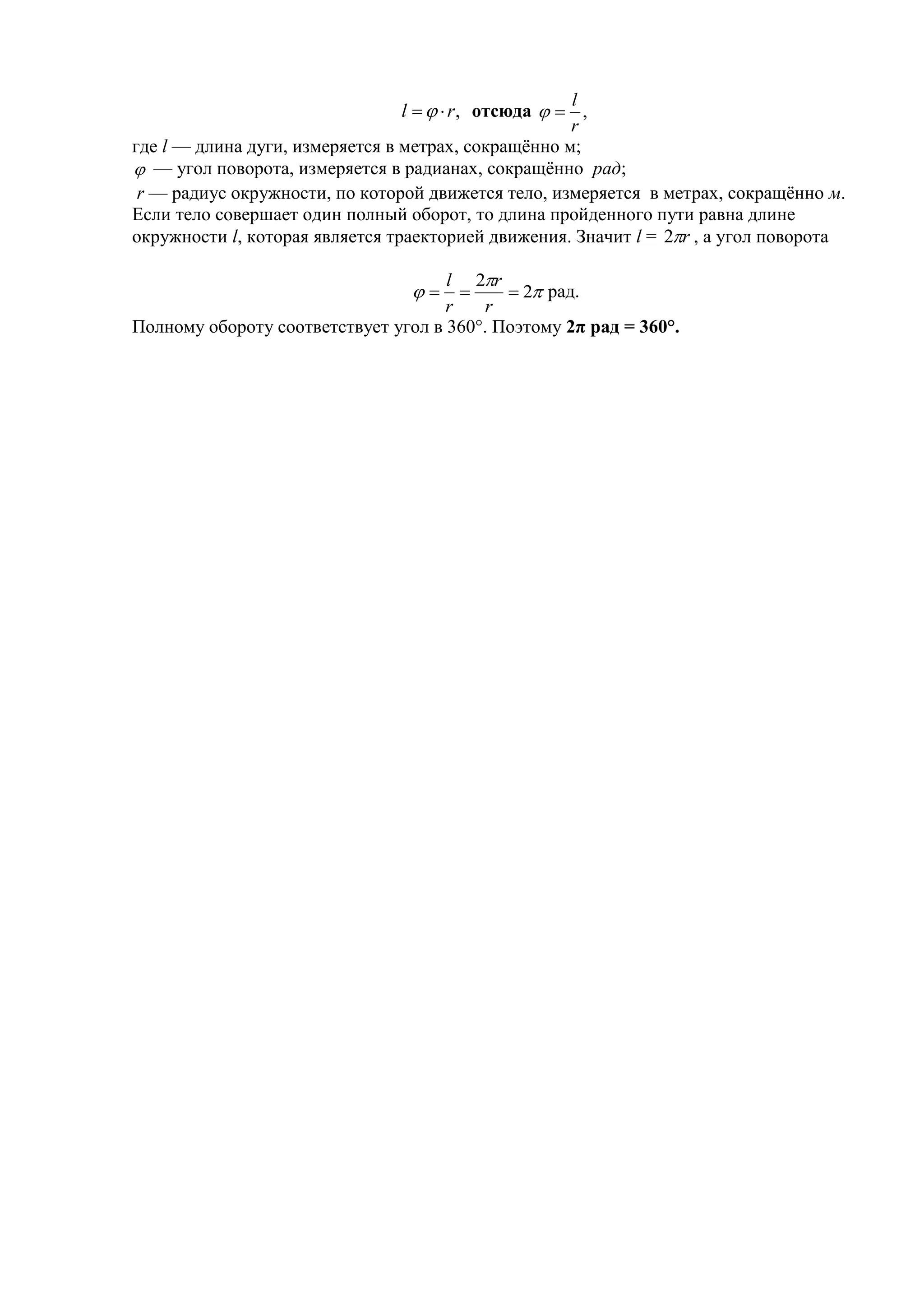
Документ описывает движение тела по окружности, включая понятия радиус-вектора, угла поворота и длины дуги. Угол поворота обозначается греческой буквой φ и измеряется в радианах, причем один радиан соответствует дуге длиной, равной радиусу окружности. При одном полном обороте длина пути равна длине окружности, что соответствует углу в 360° или 2π радиан.