Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
sandai
PDF, PPTX
4,290 views
【学習メモ#3rd】12ステップで作る組込みOS自作入門
12ステップで作る組込みOS自作入門 http://www.amazon.co.jp/dp/4877832394/ 坂井 弘亮(著) カットシステム
Technology
◦
Read more
4
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 56
2
/ 56
3
/ 56
4
/ 56
5
/ 56
6
/ 56
7
/ 56
8
/ 56
9
/ 56
10
/ 56
11
/ 56
12
/ 56
13
/ 56
14
/ 56
15
/ 56
16
/ 56
17
/ 56
18
/ 56
19
/ 56
20
/ 56
21
/ 56
22
/ 56
23
/ 56
24
/ 56
25
/ 56
26
/ 56
27
/ 56
28
/ 56
29
/ 56
30
/ 56
31
/ 56
32
/ 56
33
/ 56
34
/ 56
35
/ 56
36
/ 56
37
/ 56
38
/ 56
39
/ 56
40
/ 56
41
/ 56
42
/ 56
43
/ 56
44
/ 56
45
/ 56
46
/ 56
47
/ 56
48
/ 56
49
/ 56
50
/ 56
51
/ 56
52
/ 56
53
/ 56
54
/ 56
55
/ 56
56
/ 56
More Related Content
PDF
【学習メモ#4th】12ステップで作る組込みOS自作入門
by
sandai
PDF
【学習メモ#1st】12ステップで作る組込みOS自作入門
by
sandai
PPTX
リアルタイムOSの必要性とTOPPERS/SSPの紹介
by
NSaitoNmiri
PDF
Page reclaim
by
siburu
PDF
CXL_説明_公開用.pdf
by
Yasunori Goto
PDF
The ideal and reality of NVDIMM RAS
by
Yasunori Goto
PDF
ディープラーニングの2値化(Binarized Neural Network)
by
Hideo Terada
PDF
SFO15-TR9: PSCI, ACPI (and UEFI to boot)
by
Linaro
【学習メモ#4th】12ステップで作る組込みOS自作入門
by
sandai
【学習メモ#1st】12ステップで作る組込みOS自作入門
by
sandai
リアルタイムOSの必要性とTOPPERS/SSPの紹介
by
NSaitoNmiri
Page reclaim
by
siburu
CXL_説明_公開用.pdf
by
Yasunori Goto
The ideal and reality of NVDIMM RAS
by
Yasunori Goto
ディープラーニングの2値化(Binarized Neural Network)
by
Hideo Terada
SFO15-TR9: PSCI, ACPI (and UEFI to boot)
by
Linaro
What's hot
PPTX
MikanOSと自作CPUをUSBで接続する
by
uchan_nos
PDF
ros_whillとROS2対応(ROS勉強会第28回LT大会)
by
Seiya Shimizu
PDF
計算量のはなし
by
徹 稲盛
PDF
강좌 07 ARM 프로세서용 아두이노
by
chcbaram
PPTX
Linux Kernel Booting Process (1) - For NLKB
by
shimosawa
PDF
BAS004-1_伺服器硬體基礎_v181026
by
rwp99346
PPTX
plotnetcfg入門 | Introduction to plotnetcfg
by
Kentaro Ebisawa
PPTX
小型安価なFPGAボードの紹介と任意波形発生器
by
uchan_nos
PDF
私のファミコンのfpsは530000です。もちろんフルパワーで(以下略
by
Hiroki Nakahara
PDF
Process Scheduler and Balancer in Linux Kernel
by
Haifeng Li
PPTX
ネットワークシミュレータで手軽にネットワークのお勉強(GNS3編)
by
Wataru NOGUCHI
PDF
Apstra AOSによるEVPN-VXLANの自動化
by
ApstraJapan
PDF
Building your own embedded system with Yocto
by
mmeisenzahl
PDF
Elastic Cloudを利用したセキュリティ監視の事例
by
Elasticsearch
PDF
Introduction to Modern U-Boot
by
GlobalLogic Ukraine
PDF
HKG15-107: ACPI Power Management on ARM64 Servers (v2)
by
Linaro
PDF
あなたの知らないAzure ~OpenStackと共存する冴えたやり方~
by
Toru Makabe
ODP
xrdpで変える!社内のPC環境
by
iCRAFT Corp. (アイクラフト株式会社)
PPTX
【DL輪読会】Semi-Parametric Neural Image Synthesis
by
Deep Learning JP
PDF
バイナリニューラルネットとハードウェアの関係
by
Kento Tajiri
MikanOSと自作CPUをUSBで接続する
by
uchan_nos
ros_whillとROS2対応(ROS勉強会第28回LT大会)
by
Seiya Shimizu
計算量のはなし
by
徹 稲盛
강좌 07 ARM 프로세서용 아두이노
by
chcbaram
Linux Kernel Booting Process (1) - For NLKB
by
shimosawa
BAS004-1_伺服器硬體基礎_v181026
by
rwp99346
plotnetcfg入門 | Introduction to plotnetcfg
by
Kentaro Ebisawa
小型安価なFPGAボードの紹介と任意波形発生器
by
uchan_nos
私のファミコンのfpsは530000です。もちろんフルパワーで(以下略
by
Hiroki Nakahara
Process Scheduler and Balancer in Linux Kernel
by
Haifeng Li
ネットワークシミュレータで手軽にネットワークのお勉強(GNS3編)
by
Wataru NOGUCHI
Apstra AOSによるEVPN-VXLANの自動化
by
ApstraJapan
Building your own embedded system with Yocto
by
mmeisenzahl
Elastic Cloudを利用したセキュリティ監視の事例
by
Elasticsearch
Introduction to Modern U-Boot
by
GlobalLogic Ukraine
HKG15-107: ACPI Power Management on ARM64 Servers (v2)
by
Linaro
あなたの知らないAzure ~OpenStackと共存する冴えたやり方~
by
Toru Makabe
xrdpで変える!社内のPC環境
by
iCRAFT Corp. (アイクラフト株式会社)
【DL輪読会】Semi-Parametric Neural Image Synthesis
by
Deep Learning JP
バイナリニューラルネットとハードウェアの関係
by
Kento Tajiri
Viewers also liked
PDF
【学習メモ#5th】12ステップで作る組込みOS自作入門
by
sandai
PDF
【学習メモ#6th】12ステップで作る組込みOS自作入門
by
sandai
PDF
【学習メモ#7th】12ステップで作る組込みOS自作入門
by
sandai
PPTX
RoadAR v.2.3 english
by
Евгений Никольский
PDF
【学習メモ#8th】12ステップで作る組込みOS自作入門
by
sandai
PDF
【学習メモ#11th】12ステップで作る組込みOS自作入門
by
sandai
PDF
【学習メモ#9th】12ステップで作る組込みOS自作入門
by
sandai
PDF
QEMUでARM64bitベアメタルプログラミング
by
Yuma Ohgami
PDF
組み込み向けC++のやり方を探る - mbedで楽しい組み込みプログラミング -
by
Kishi Shundo
PDF
30日でできない!コンピューター自作入門 - カーネル/VM探検隊@つくば
by
Hirotaka Kawata
PDF
組込みOSを作ってみよう!(オープンソースカンファレンス内セミナー資料)
by
kozossakai
PDF
やってよかったOS作り
by
Hidemi Kawai
PDF
低レイヤー入門
by
demuyan
PPTX
人工知能概論 1
by
Tadahiro Taniguchi
PPTX
ゼロから始める自作 CPU 入門
by
Hirotaka Kawata
PDF
【2000行弱!】x86用自作カーネルの紹介
by
Yuma Ohgami
PDF
Web系だって低レイヤーがやりたいんだよ! コンパイラことはじめ
by
Nisei Kimura
PDF
C++でできる!OS自作入門
by
uchan_nos
PDF
Ctfのためのpython入門
by
shiracamus
PDF
ハッキング実演
by
Ken Ogura
【学習メモ#5th】12ステップで作る組込みOS自作入門
by
sandai
【学習メモ#6th】12ステップで作る組込みOS自作入門
by
sandai
【学習メモ#7th】12ステップで作る組込みOS自作入門
by
sandai
RoadAR v.2.3 english
by
Евгений Никольский
【学習メモ#8th】12ステップで作る組込みOS自作入門
by
sandai
【学習メモ#11th】12ステップで作る組込みOS自作入門
by
sandai
【学習メモ#9th】12ステップで作る組込みOS自作入門
by
sandai
QEMUでARM64bitベアメタルプログラミング
by
Yuma Ohgami
組み込み向けC++のやり方を探る - mbedで楽しい組み込みプログラミング -
by
Kishi Shundo
30日でできない!コンピューター自作入門 - カーネル/VM探検隊@つくば
by
Hirotaka Kawata
組込みOSを作ってみよう!(オープンソースカンファレンス内セミナー資料)
by
kozossakai
やってよかったOS作り
by
Hidemi Kawai
低レイヤー入門
by
demuyan
人工知能概論 1
by
Tadahiro Taniguchi
ゼロから始める自作 CPU 入門
by
Hirotaka Kawata
【2000行弱!】x86用自作カーネルの紹介
by
Yuma Ohgami
Web系だって低レイヤーがやりたいんだよ! コンパイラことはじめ
by
Nisei Kimura
C++でできる!OS自作入門
by
uchan_nos
Ctfのためのpython入門
by
shiracamus
ハッキング実演
by
Ken Ogura
Similar to 【学習メモ#3rd】12ステップで作る組込みOS自作入門
PDF
V6 unix in okinawa
by
magoroku Yamamoto
PDF
PFI Seminar 2010/02/18
by
Preferred Networks
PDF
ただのリンカを書いた話.pdf
by
simotin13 Miyazaki
PDF
V6read#3
by
magoroku Yamamoto
KEY
core dumpでcode golf
by
Nomura Yusuke
PPTX
as-2. メモリと CPU
by
kunihikokaneko1
PDF
デバドラを書いてみよう!
by
Masami Ichikawa
PPTX
as-5. サブルーチン呼び出しのメカニズム
by
kunihikokaneko1
PPT
Altanative macro
by
Motohiro KOSAKI
PDF
kagami_comput2016_13
by
swkagami
PPTX
はりぼて OS で ELF なアプリを起動してみた
by
uchan_nos
PDF
llvm入門
by
MITSUNARI Shigeo
PPT
d-kami x86-2
by
Daisuke Kamikawa
PDF
2011.09.18 v7から始めるunix まとめ
by
Makiko Konoshima
PDF
d-kami x86-1
by
Daisuke Kamikawa
PDF
2011.06.11 v7から始めるunix まとめ
by
Makiko Konoshima
PPT
コンピュータの構成と設計 第3版 第2章 勉強会資料
by
futada
PDF
kagami_comput2015_13
by
swkagami
PDF
仮想記憶入門 BSD-4.3を例題に
by
magoroku Yamamoto
PDF
mbedではじめる組み込みHaskellプログラミング
by
Kiwamu Okabe
V6 unix in okinawa
by
magoroku Yamamoto
PFI Seminar 2010/02/18
by
Preferred Networks
ただのリンカを書いた話.pdf
by
simotin13 Miyazaki
V6read#3
by
magoroku Yamamoto
core dumpでcode golf
by
Nomura Yusuke
as-2. メモリと CPU
by
kunihikokaneko1
デバドラを書いてみよう!
by
Masami Ichikawa
as-5. サブルーチン呼び出しのメカニズム
by
kunihikokaneko1
Altanative macro
by
Motohiro KOSAKI
kagami_comput2016_13
by
swkagami
はりぼて OS で ELF なアプリを起動してみた
by
uchan_nos
llvm入門
by
MITSUNARI Shigeo
d-kami x86-2
by
Daisuke Kamikawa
2011.09.18 v7から始めるunix まとめ
by
Makiko Konoshima
d-kami x86-1
by
Daisuke Kamikawa
2011.06.11 v7から始めるunix まとめ
by
Makiko Konoshima
コンピュータの構成と設計 第3版 第2章 勉強会資料
by
futada
kagami_comput2015_13
by
swkagami
仮想記憶入門 BSD-4.3を例題に
by
magoroku Yamamoto
mbedではじめる組み込みHaskellプログラミング
by
Kiwamu Okabe
【学習メモ#3rd】12ステップで作る組込みOS自作入門
1.
12ステップで作る組込みOS自作入門
3rdステップ @sandai
2.
【参考書籍】 12ステップで作る組込みOS自作入門 【内容】 1ステップずつ、実際に動かしながらプログラムを発展さ せていく方式で無理なく学べる。OSやハードウェアに詳 しくない方にも理解できるよう に十分な説明を提供 坂井 弘亮(著) カットシステム(2010/5) 【税込価格】 4,410円 【サポートページ】 http://kozos.jp/books/makeos/
3.
もくじ 1.メモリ構成 2.リンカ・スクリプト 3.「VA≠PA」の対応とプログラム実行 4.まとめ
4.
1.メモリ構成
5.
組込みOSにおけるメモリの扱い ●
組込みOSでは仮想メモリのような複雑な機構は 実装しないだからマイコン・ボードの持つメモ リの扱いはシビア – どのように割り当てて利用するか、調整することが 必要 ● 具体的には以下の3つのことをする必要がある – CPUのメモリ構成を知る – リンカ・スクリプトによるメモリ配分方法 – コンパイラのメモリの配置方法
6.
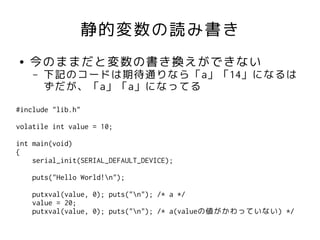
静的変数の読み書き ●
今のままだと変数の書き換えができない – 下記のコードは期待通りなら「a」「14」になるは ずだが、「a」「a」になってる #include "lib.h" volatile int value = 10; int main(void) { serial_init(SERIAL_DEFAULT_DEVICE); puts("Hello World!n"); putxval(value, 0); puts("n"); /* a */ value = 20; putxval(value, 0); puts("n"); /* a(valueの値がかわっていない) */
7.
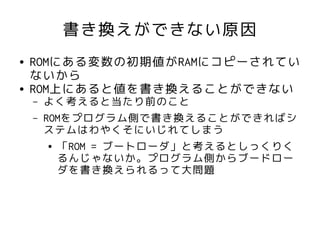
書き換えができない原因 ●
ROMにある変数の初期値がRAMにコピーされてい ないから ● ROM上にあると値を書き換えることができない – よく考えると当たり前のこと – ROMをプログラム側で書き換えることができればシ ステムはわやくそにいじれてしまう ● 「ROM = ブートローダ」と考えるとしっくりく るんじゃないか。プログラム側からブードロー ダを書き換えられるって大問題
8.
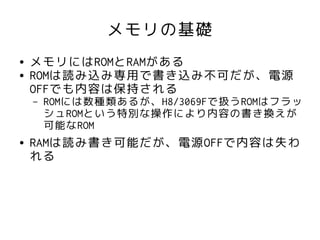
メモリの基礎 ●
メモリにはROMとRAMがある ● ROMは読み込み専用で書き込み不可だが、電源 OFFでも内容は保持される – ROMには数種類あるが、H8/3069Fで扱うROMはフラッ シュROMという特別な操作により内容の書き換えが 可能なROM ● RAMは読み書き可能だが、電源OFFで内容は失わ れる
9.
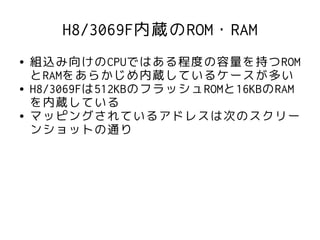
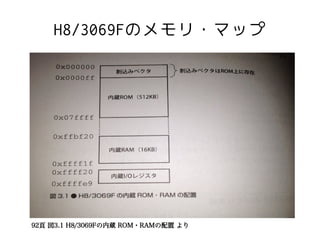
H8/3069F内蔵のROM・RAM ●
組込み向けのCPUではある程度の容量を持つROM とRAMをあらかじめ内蔵しているケースが多い ● H8/3069Fは512KBのフラッシュROMと16KBのRAM を内蔵している ● マッピングされているアドレスは次のスクリー ンショットの通り
10.
H8/3069Fのメモリ・マップ 92頁 図3.1 H8/3069Fの内蔵
ROM・RAMの配置 より
11.
メモリと領域 ●
CPUはメモリにあるプログラムしか実行できな いので、プログラムをメモリにコピーしなけれ ばならない ● コピーされたプログラムはそのままの機械語 コードではなくいくつかの領域から構成されて いる ● また、実行形式ファイルの内部もいくつかの領 域に分かれており、その領域単位でメモリへの コピーが行われている ● メモリ上にコピーされたプログラムは、次の3 つの領域を持つ
12.
メモリ上の3つの領域 ●
テキスト領域 – CPUが実行する機械語コードが置かれる ● データ領域 – 初期値を持つ静的変数などが置かれる ● BSS領域 – 初期値を持たない静的変数などが置かれる
13.
静的変数と自動変数 ●
静的変数 – メモリ上に割り当てられた変数 – 関数外やstaticで定義した変数がこれ。グローバル 変数のことかな ● 自動変数 – スタックに割り当てられた変数 – 関数内で定義した変数はこれ。ローカル変数ってこ とかな
14.
静的領域 ●
静的変数はメモリ上のどこかに固定で割り当て られる ● この固定の割当先を静的領域と呼ぶ ● 静的領域は次の2つの領域から構成される – データ領域...初期値を持つ変数はここ – BSS領域...初期値を持たない変数はここ ● 初期値のある変数はプログラムの実行開始時に 初期値を設定する必要がある – なので、データ領域は変数の初期値を書き込んだ状 態で実行形式ファイル上に作成される
15.
領域のヘッダ ●
実行形式ファイルの内部も領域分けされている – 単純に機械語の命令がベタに書かれているわけでは ない ● 分割された領域はその領域情報やファイル情報 をヘッダとして持っている ● 実行形式ファイルにも何種類かフォーマットが あるが、多くのフォーマットは最低でも3つの 領域は持っている ● gccが生成する実行形式ファイルのフォーマッ トはELF形式
16.
実行形式ファイルのフォーマット ●
実行形式ファイルにも何種類かフォーマットが あるが、多くのフォーマットは最低でも3つの 領域は持っている ● gccが生成する実行形式ファイルのフォーマッ トはELF形式 ● ELF形式のファイルは、readelfコマンドで解析 することができる。 – h8300-elf-readelf -a kzload.elf
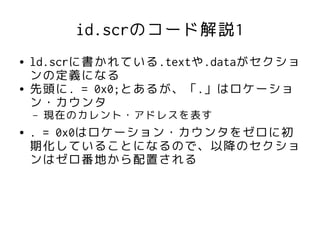
17.
readelfが出力したデータ /Users/sandai/12step/src/02/bootload% h8300-elf-readelf -a
kzload.elf ELF Header: Magic: 7f 45 4c 46 01 02 01 00 00 00 00 00 00 00 00 00 . . Section Headers: [Nr] Name Type Addr Off Size ES Flg Lk Inf Al [ 0] NULL 00000000 000000 000000 00 0 0 0 [ 1] .vectors PROGBITS 00000000 000074 000100 00 WA 0 0 4 [ 2] .text PROGBITS 00000100 000174 0002b8 00 AX 0 0 2 [ 3] .text.startup PROGBITS 000003b8 00042c 000042 00 AX 0 0 2 [ 4] .rodata PROGBITS 000003fc 000470 00002b 00 A 0 0 4 . . Program Headers: Type Offset VirtAddr PhysAddr FileSiz MemSiz Flg Align LOAD 0x000074 0x00000000 0x00000000 0x003fa 0x003fa RWE 0x1 LOAD 0x000470 0x000003fc 0x000003fc 0x0002b 0x0002b R 0x1 . . Symbol table '.symtab' contains 58 entries: Num: Value Size Type Bind Vis Ndx Name . . 40: 000003fc 12 OBJECT LOCAL DEFAULT 4 _regs . . 43: 00000000 256 OBJECT GLOBAL DEFAULT 1 _vectors 44: 00000278 46 NOTYPE GLOBAL DEFAULT 2 _putc 45: 000002a6 36 NOTYPE GLOBAL DEFAULT 2 _puts . . 57: 000003b8 66 NOTYPE GLOBAL DEFAULT 3 _main
18.
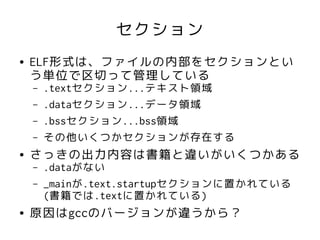
セクション ●
ELF形式は、ファイルの内部をセクションとい う単位で区切って管理している – .textセクション...テキスト領域 – .dataセクション...データ領域 – .bssセクション...bss領域 – その他いくつかセクションが存在する ● さっきの出力内容は書籍と違いがいくつかある – .dataがない – _mainが.text.startupセクションに置かれている (書籍では.textに置かれている) ● 原因はgccのバージョンが違うから?
19.
プログラムはROM上で動いている ●
現状のコードはh8writeによってH8内部のフ ラッシュROMに書き込まれている ● CPUはROMから命令を読み込み、逐次実行してい るだけ。これを「プログラムはROM上で動いて いる」と呼ぶ ● プログラムがRAMにコピーされずに動いてい るってことかな – ノイマン型であればメモリにロードするイメージし かないんだけど、メモリにロードする前に逐次処理 してるってことでいいのか。ROMの方が遅いだろう ね
20.
変数の実体と配置1 ●
コンピュータは変数の値を実体としてメモリに 記憶する – 自動変数はレジスタに配置されることもあるが、こ こでは深く言及しない ● 変数を読み書きするとはその記憶したメモリを 読み書きするということ ● 変数とは特定のメモリ領域に付けられた名前で しかない
21.
変数の実体と配置2 ●
変数の割り当て方法は大きく分けて2通り – 自動変数はスタックに割り当てる – 静的変数は静的領域(データ、bss領域)に割り当て る ● 自動変数はスタックに割り当てられ、関数を抜 けたら捨てられる ● ただし、lib.cやserial.cで利用している自動 変数はstartup.sでスタック・ポインタをRAM上 に設定しているため、読み書きできている状態 にある
22.
静的変数の書き換え ●
ROM上に配置された変数を読み書きするコード は、ROM上の領域を読み書きする機械語コード に置き換えられる ● しかし、ROMへの書き込みはできないので変数 の値を書き換えるコードでも実際は書き換えら れない ● 今後進めていく上で静的変数の値を書き換えら れないというのは面倒 ● そこで静的変数のデータをROM上ではなくRAM上 に配置する必要がある
23.
2.リンカ・スクリプト
24.
リンカ・スクリプト(ld.scr) ●
リンカ・スクリプトは実行形式ファイルを作成 する際に、機械語コードや静的領域をどのよう にアドレス割り当てするのか、リンカに対して 指示するためのファイル – 物理的メモリにセクションをどのようにマッピング するかを定義するってことかな – リンクの段階でプログラムをメモリにどう配置する のか決定しているわけね ● 静的領域をROMからRAMへ配置を変えるなら、こ のリンク・スクリプトによって行う
25.
id.scrのコード解説1 ●
ld.scrに書かれている.textや.dataがセクショ ンの定義になる ● 先頭に. = 0x0;とあるが、「.」はロケーショ ン・カウンタ – 現在のカレント・アドレスを表す ● . = 0x0はロケーション・カウンタをゼロに初 期化していることになるので、以降のセクショ ンはゼロ番地から配置される
26.
id.scrのコード解説2 .vectors : {
vector.o(.data) } ● .vectorsというセクションを作成し、vector.o の.dataセクションを配置 ● . = 0x0の直後なので、フラッシュROMの先頭に 配置していることになるね – 割り込みベクタはこのゼロ番地から始まる – そして割り込みベクタの先頭はリセット・ベクタな ので、ここにstartup.sの_start関数が割り当てら れているってわけ
27.
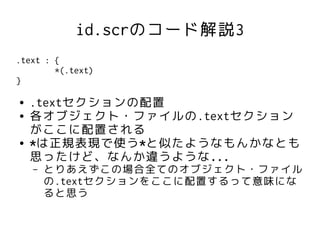
id.scrのコード解説3 .text : {
*(.text) } ● .textセクションの配置 ● 各オブジェクト・ファイルの.textセクション がここに配置される ● *は正規表現で使う*と似たようなもんかなとも 思ったけど、なんか違うような... – とりあえずこの場合全てのオブジェクト・ファイル の.textセクションをここに配置するって意味にな ると思う
28.
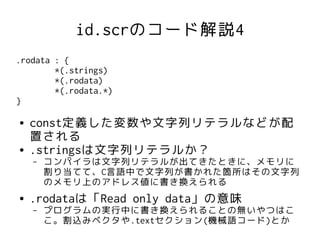
id.scrのコード解説4 .rodata : {
*(.strings) *(.rodata) *(.rodata.*) } ● const定義した変数や文字列リテラルなどが配 置される ● .stringsは文字列リテラルか? – コンパイラは文字列リテラルが出てきたときに、メモリに 割り当てて、C言語中で文字列が書かれた箇所はその文字列 のメモリ上のアドレス値に書き換えられる ● .rodataは「Read only data」の意味 – プログラムの実行中に書き換えられることの無いやつはこ こ。割込みベクタや.textセクション(機械語コード)とか
29.
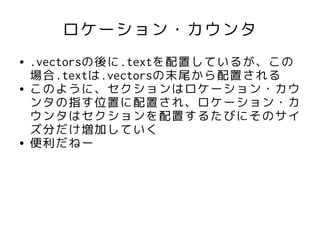
ロケーション・カウンタ ●
.vectorsの後に.textを配置しているが、この 場合.textは.vectorsの末尾から配置される ● このように、セクションはロケーション・カウ ンタの指す位置に配置され、ロケーション・カ ウンタはセクションを配置するたびにそのサイ ズ分だけ増加していく ● 便利だねー
30.
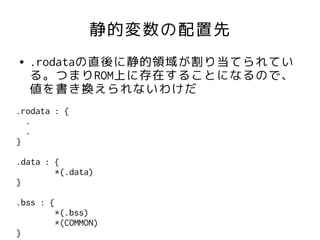
静的変数の配置先 ●
.rodataの直後に静的領域が割り当てられてい る。つまりROM上に存在することになるので、 値を書き換えられないわけだ .rodata : { . . } .data : { *(.data) } .bss : { *(.bss) *(COMMON) }
31.
id.scrで配置先をRAMにしてみる ●
静的変数を以下のように配置するとどうなるか .rodata : { *(.strings) *(.rodata) *(.rodata.*) } . = 0xffbf20; .data : { *(.data) } .bss : { *(.bss) *(COMMON) }
32.
RAMに配置する ●
前のコードはつまりロケーション・カウンタを RAMに設定して、静的領域だけRAMに配置される ようにしている – 0xffbf20はRAMのアドレス ● ROM上でないから書き換えができるかとおもい きや、これは正しく動作しない
33.
RAMに配置しても動作しない理由 ●
h8writeで実行形式ファイルを書き込むわけだ けど、h8writeはフラッシュROMに対して行われ る ● だからRAMに設定したところで意味はない – ROMじゃないよってh8writeでエラーも表示される ● 仮にRAMに書き込めたとしても、電源を落とし たら初期値が消えてしまう – 次に電源ONしたときにそのデータが無いってこと。 コードに書かれていても実体となるデータがなけ りゃどうしようもないさ
34.
書き換えができない問題点 ●
問題点は次の2つ – ①変数の本体をROMに置くと ● 書き込みができない – ②変数の本体をRAMに置くと ● 電源OFFで値が消えてしまう ● じゃあどうすればいいのか? – まずROMに書き込んでそれからRAMにコピーして、プ ログラムからはRAM上のデータにアクセスするよう にしたらいいじゃないか
35.
静的変数を書き換え可能にする ●
①変数の初期値をROMに保存するようにしてフ ラッシュROMに書き込む ● ②電源ONでプログラムを起動したときに、プロ グラムの先頭付近でフラッシュROMの変数の初 期値をRAMにコピー ● そうしてプログラムから変数にアクセスすると きは、RAM上のコピー先のアドレスに対してア クセスされるようにする
36.
物理アドレスと論理アドレス ●
ROMからRAMへコピーしてRAMでデータを操作す るということは、初期値が配置されるアドレス とプログラムが変数にアクセスするときのアド レスが違うということになる – ROMのアドレスに実際の初期値があるけど、プログ ラムから操作するときはRAMのアドレスにあるデー タだからね ● ここではROMのアドレスを物理アドレス、RAMの アドレスを論理アドレスと呼ぶ – 仮想メモリの用語とかぶるけど、readelfに合わせ るために物理アドレスや論理アドレスを使っている
37.
物理アドレス ●
物理アドレス(Physical Address)はロード・ア ドレス(Load Address)とも呼ばれる – PAだったりLAと略されたり、LMA(Load Memory Address)と呼ばれることもある ● ここでは単純にROM上のアドレスを物理アドレ スと考えれば良い
38.
論理アドレス ●
論理アドレス(Logical Address)はリンク・ア ドレス(Link Address)とも呼ばれる – LAと略されたり、仮想アドレス(Virtual Address) と呼ばれVAと略されることがある ● 単純にRAM上のアドレスが論理アドレスと考え れば良い
39.
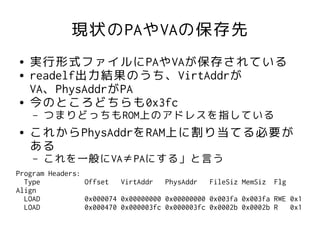
現状のPAやVAの保存先 ●
実行形式ファイルにPAやVAが保存されている ● readelf出力結果のうち、VirtAddrが VA、PhysAddrがPA ● 今のところどちらも0x3fc – つまりどっちもROM上のアドレスを指している ● これからPhysAddrをRAM上に割り当てる必要が ある – これを一般にVA≠PAにする」と言う Program Headers: Type Offset VirtAddr PhysAddr FileSiz MemSiz Flg Align LOAD 0x000074 0x00000000 0x00000000 0x003fa 0x003fa RWE 0x1 LOAD 0x000470 0x000003fc 0x000003fc 0x0002b 0x0002b R 0x1
40.
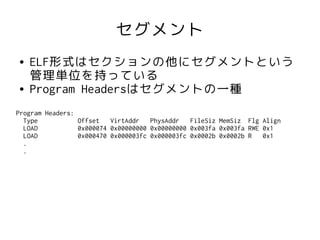
セグメント ●
ELF形式はセクションの他にセグメントという 管理単位を持っている ● Program Headersはセグメントの一種 Program Headers: Type Offset VirtAddr PhysAddr FileSiz MemSiz Flg Align LOAD 0x000074 0x00000000 0x00000000 0x003fa 0x003fa RWE 0x1 LOAD 0x000470 0x000003fc 0x000003fc 0x0002b 0x0002b R 0x1 . .
41.
ロードとローダ ●
プログラムの実行時にセグメント情報が参照さ れメモリに展開される。これをロードと呼ぶ ● ロードを行うプログラムをローダと呼ぶ ● ローダが実行形式ファイルのセグメントを参照 して、そのとおりにメモリ上に展開するってわ け
42.
セクションとセグメントの違い ●
セクションはリンク時に同じ内容の領域をリン カがまとめるためのもの ● セグメントはプログラムの実行時にローダが参 照してメモリ上に展開するためのもの – ローダが参照するのはセグメントであって、セク ションではない ● 用語の出現場所が似てるから混乱しやすいな
43.
3.「VA≠PA」の対応とプログラム実
行
44.
プログラムの修正 ●
修正したファイル – ld.scr ● 「VA≠PA」対策 – main.c ● 静的変数の書き換えサンプル追加 – startup.s ● スタックの設定の修正 ● これらのうち、重要な「VA≠PA」対策について 述べておく
45.
VA≠PA対策 ●
静的領域をRAM上でプログラムから操作できる ようにするにあたって行ったことは次の通り – .dataセクションの実際のデータをROMに配置 – これをプログラム側からはRAMに配置されているよ うにみせる – みせても実際にデータは配置されていないの で、ROMの.dataセクションをRAMにコピーして操作 できるようにする
46.
リンカ・スクリプトで行うこと ●
ROMに配置するのと、RAMに配置されたようにみ せかけるのはリンカ・スクリプトで行う ● 具体的には、まずMEMORYコマンドでセクション の各領域を定義 ● それから、.dataセクションにそれらの領域を 割り当てる ● 「> data」がRAMに配置することを意味して、 「AT> rom」がROM上の物理アドレスに配置する ことを意味する
47.
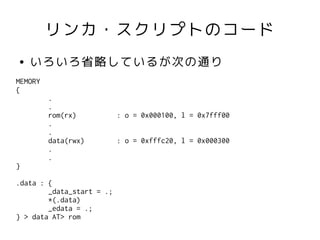
リンカ・スクリプトのコード ●
いろいろ省略しているが次の通り MEMORY { . . rom(rx) : o = 0x000100, l = 0x7fff00 . . data(rwx) : o = 0xfffc20, l = 0x000300 . . } .data : { _data_start = .; *(.data) _edata = .; } > data AT> rom
48.
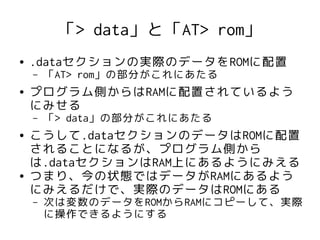
「> data」と「AT> rom」 ●
.dataセクションの実際のデータをROMに配置 – 「AT> rom」の部分がこれにあたる ● プログラム側からはRAMに配置されているよう にみせる – 「> data」の部分がこれにあたる ● こうして.dataセクションのデータはROMに配置 されることになるが、プログラム側から は.dataセクションはRAM上にあるようにみえる ● つまり、今の状態ではデータがRAMにあるよう にみえるだけで、実際のデータはROMにある – 次は変数のデータをROMからRAMにコピーして、実際 に操作できるようにする
49.
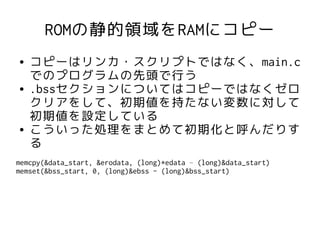
ROMの静的領域をRAMにコピー ●
コピーはリンカ・スクリプトではなく、main.c でのプログラムの先頭で行う ● .bssセクションについてはコピーではなくゼロ クリアをして、初期値を持たない変数に対して 初期値を設定している ● こういった処理をまとめて初期化と呼んだりす る memcpy(&data_start, &erodata, (long)*edata – (long)&data_start) memset(&bss_start, 0, (long)&ebss - (long)&bss_start)
50.
ROMの静的領域をRAMにコピー ●
詳しい説明は書籍を参照してほしいが、前の コードの意味は以下の通り – ROM上にある.dataセクションにある変数の初期値を RAMにコピーしている – RAM上の.bssセクションをゼロクリアして、.bssセ クションに配置された変数のメモリ上の値をゼロに 初期化している ● .bssセクションはコピーしているわけではない ● ここまでしてようやくC言語を普通に扱えるよ うになった ● 当然ながら、先ほどの初期化コードの前に静的 変数を定義すると正常に動作しない
51.
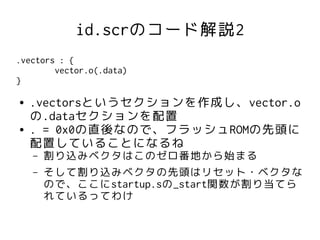
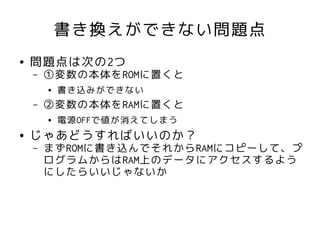
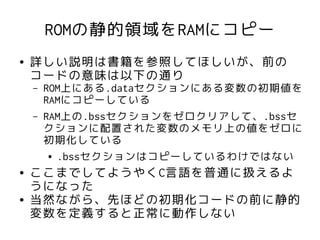
ビルドで失敗 ●
main.cで静的領域の書き換えができるかどうか のプログラムを実行するだけだが、その前に ● ビルドこけた... – gcc4.7使ってるけど、たぶんここが問題だな /Users/sandai/12step/tools/lib/gcc/h8300- elf/4.7.1/../../../../h8300-elf/bin/ld: section .text.startup [0000000000000000 -> 0000000000000081] overlaps section .vectors [0000000000000000 -> 00000000000000ff] collect2: error: ld returned 1 exit status make: *** [kzload] Error 1
52.
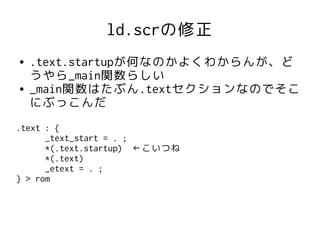
ld.scrの修正 ●
.text.startupが何なのかよくわからんが、ど うやら_main関数らしい ● _main関数はたぶん.textセクションなのでそこ にぶっこんだ .text : { _text_start = . ; *(.text.startup) ←こいつね *(.text) _etext = . ; } > rom
53.
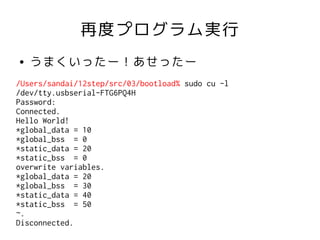
再度プログラム実行 ●
うまくいったー!あせったー /Users/sandai/12step/src/03/bootload% sudo cu -l /dev/tty.usbserial-FTG6PQ4H Password: Connected. Hello World! *global_data = 10 *global_bss = 0 *static_data = 20 *static_bss = 0 overwrite variables. *global_data = 20 *global_bss = 30 *static_data = 40 *static_bss = 50 ~. Disconnected.
54.
書籍との違い ●
_regs変数がどうも定数の扱いになってる – .rodataセクションに配置されているみたい – ROMに入っていて問題はないかな? – まあたぶんプログラム側から操作するような変数 じゃなかったからいいけど ● 大きな違いはここと、あとは.text.startupだ なあ
55.
4.まとめ
56.
まとめ ●
とりあえずこれでH8でC言語を普通に扱えるよ うになった – 具体的には静的領域をROMからRAMにコピーすること によって静的変数の書き換えが可能となった ● 組込みプログラミングというのは自前で用意し なきゃいけないことが多い
Download
![readelfが出力したデータ
/Users/sandai/12step/src/02/bootload% h8300-elf-readelf -a kzload.elf
ELF Header:
Magic: 7f 45 4c 46 01 02 01 00 00 00 00 00 00 00 00 00
.
.
Section Headers:
[Nr] Name Type Addr Off Size ES Flg Lk Inf Al
[ 0] NULL 00000000 000000 000000 00 0 0 0
[ 1] .vectors PROGBITS 00000000 000074 000100 00 WA 0 0 4
[ 2] .text PROGBITS 00000100 000174 0002b8 00 AX 0 0 2
[ 3] .text.startup PROGBITS 000003b8 00042c 000042 00 AX 0 0 2
[ 4] .rodata PROGBITS 000003fc 000470 00002b 00 A 0 0 4
.
.
Program Headers:
Type Offset VirtAddr PhysAddr FileSiz MemSiz Flg Align
LOAD 0x000074 0x00000000 0x00000000 0x003fa 0x003fa RWE 0x1
LOAD 0x000470 0x000003fc 0x000003fc 0x0002b 0x0002b R 0x1
.
.
Symbol table '.symtab' contains 58 entries:
Num: Value Size Type Bind Vis Ndx Name
.
.
40: 000003fc 12 OBJECT LOCAL DEFAULT 4 _regs
.
.
43: 00000000 256 OBJECT GLOBAL DEFAULT 1 _vectors
44: 00000278 46 NOTYPE GLOBAL DEFAULT 2 _putc
45: 000002a6 36 NOTYPE GLOBAL DEFAULT 2 _puts
.
.
57: 000003b8 66 NOTYPE GLOBAL DEFAULT 3 _main](https://image.slidesharecdn.com/12step3-120915025136-phpapp01/85/3rd-12-OS-17-320.jpg)
![ビルドで失敗
● main.cで静的領域の書き換えができるかどうか
のプログラムを実行するだけだが、その前に
● ビルドこけた...
– gcc4.7使ってるけど、たぶんここが問題だな
/Users/sandai/12step/tools/lib/gcc/h8300-
elf/4.7.1/../../../../h8300-elf/bin/ld: section .text.startup
[0000000000000000 -> 0000000000000081] overlaps section .vectors
[0000000000000000 -> 00000000000000ff]
collect2: error: ld returned 1 exit status
make: *** [kzload] Error 1](https://image.slidesharecdn.com/12step3-120915025136-phpapp01/85/3rd-12-OS-51-320.jpg)