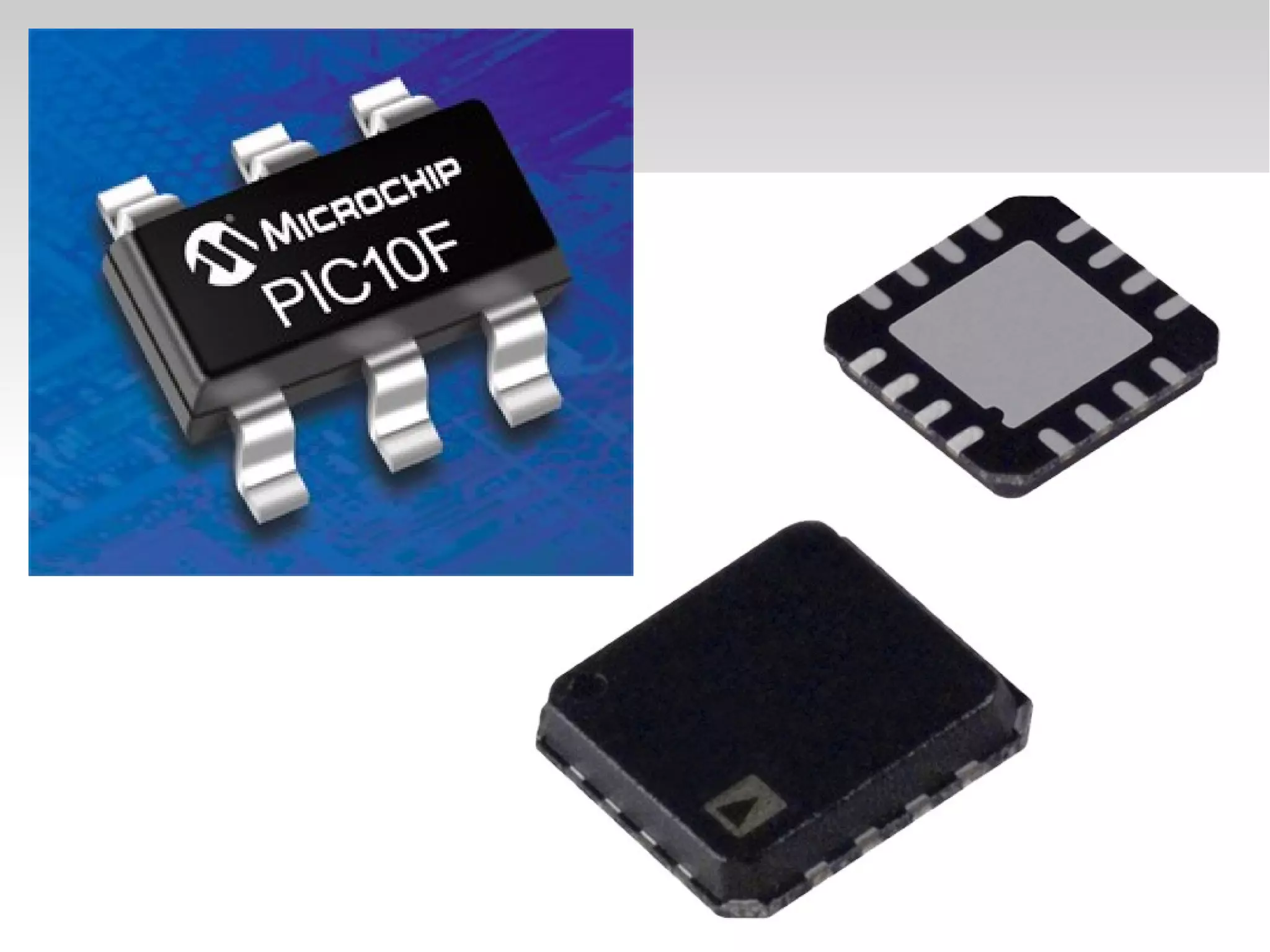
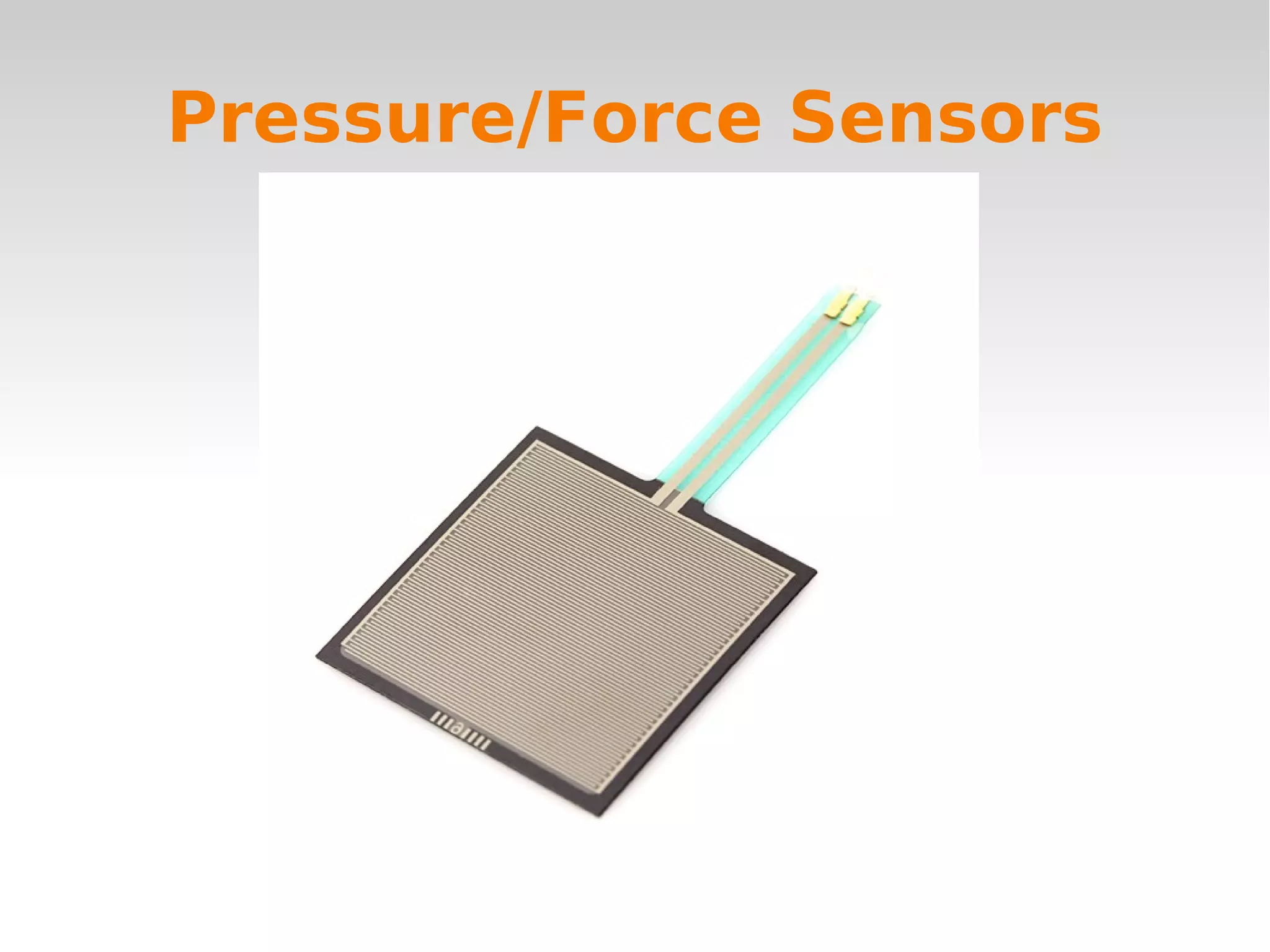
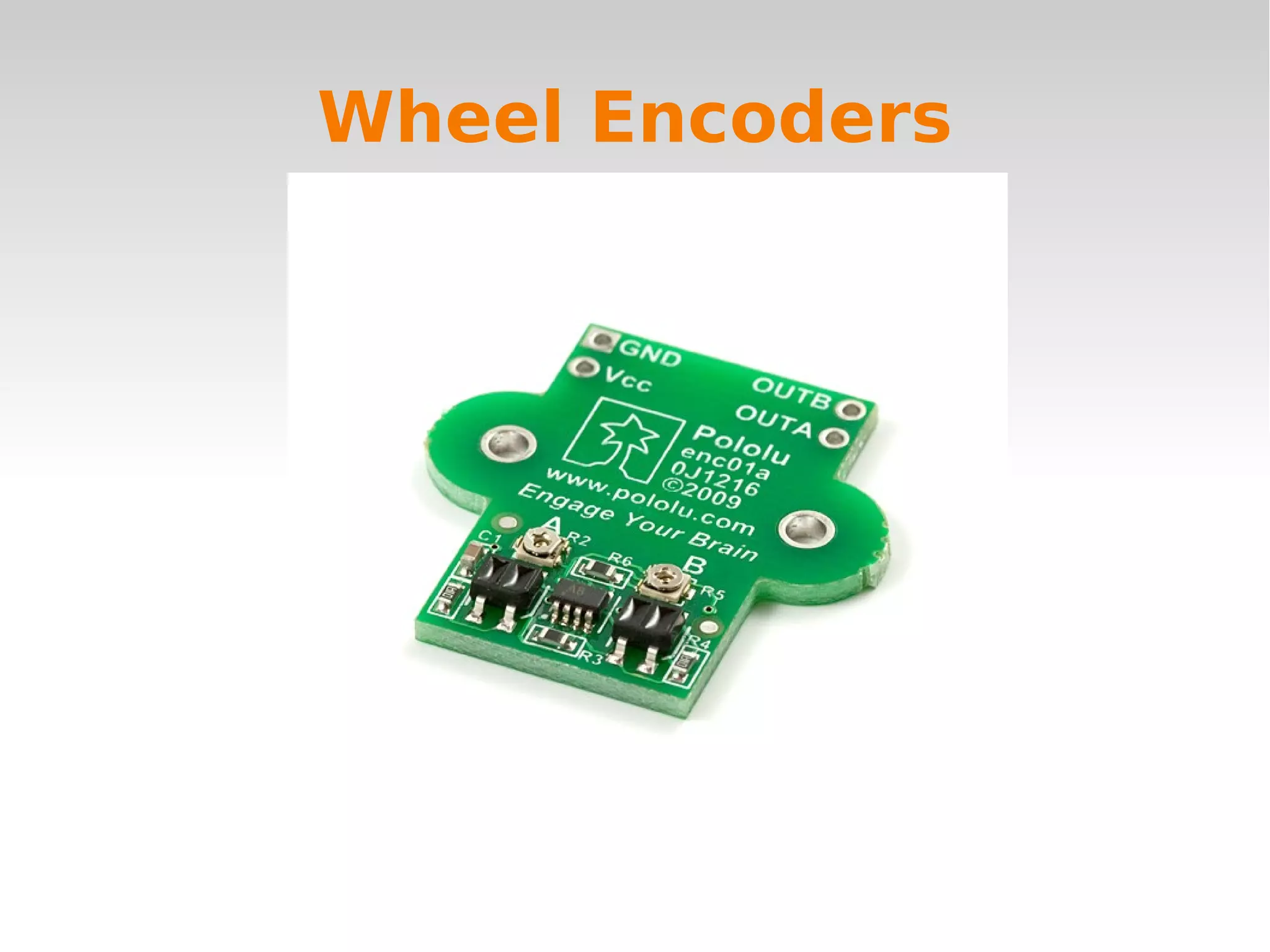
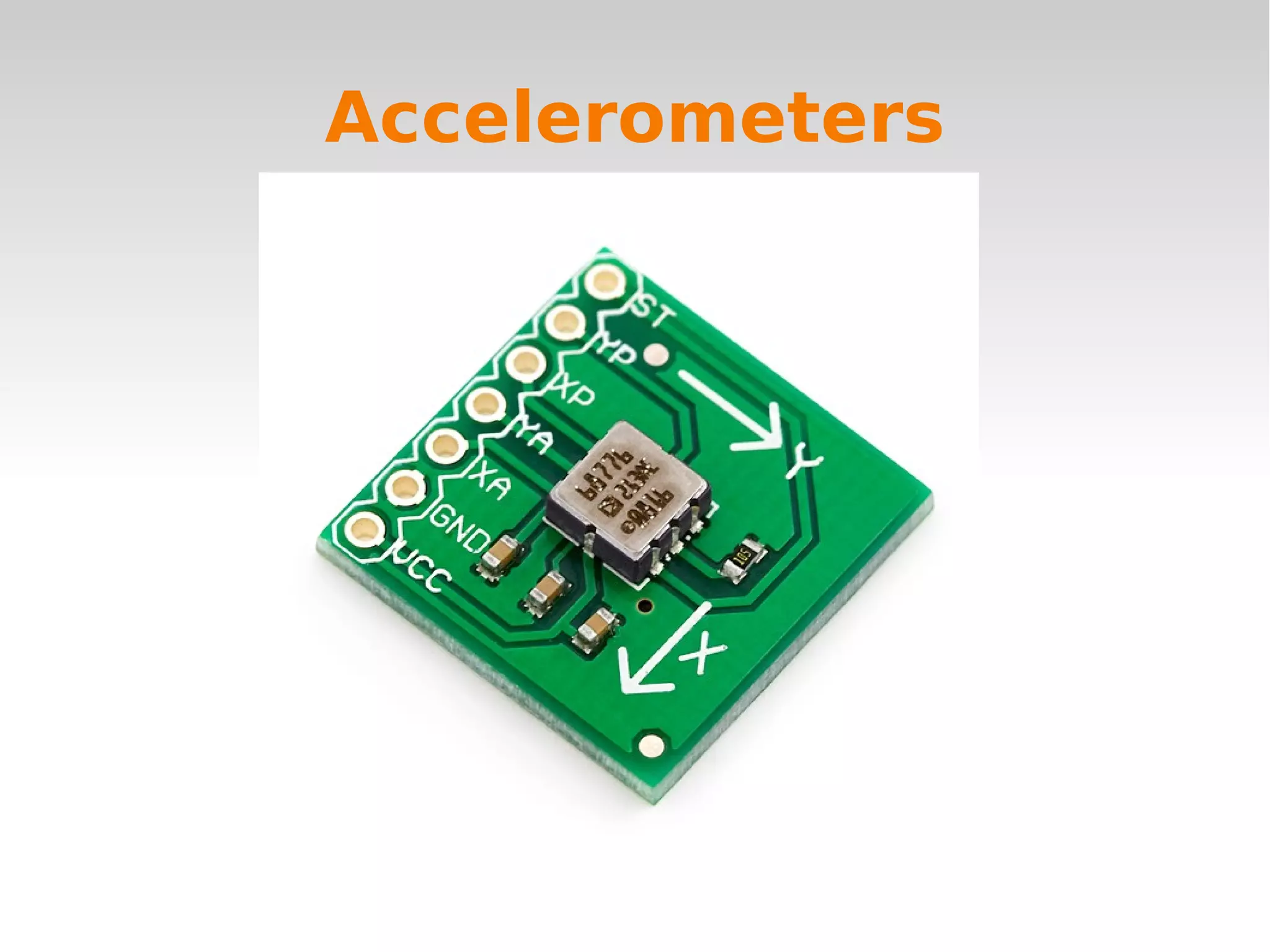
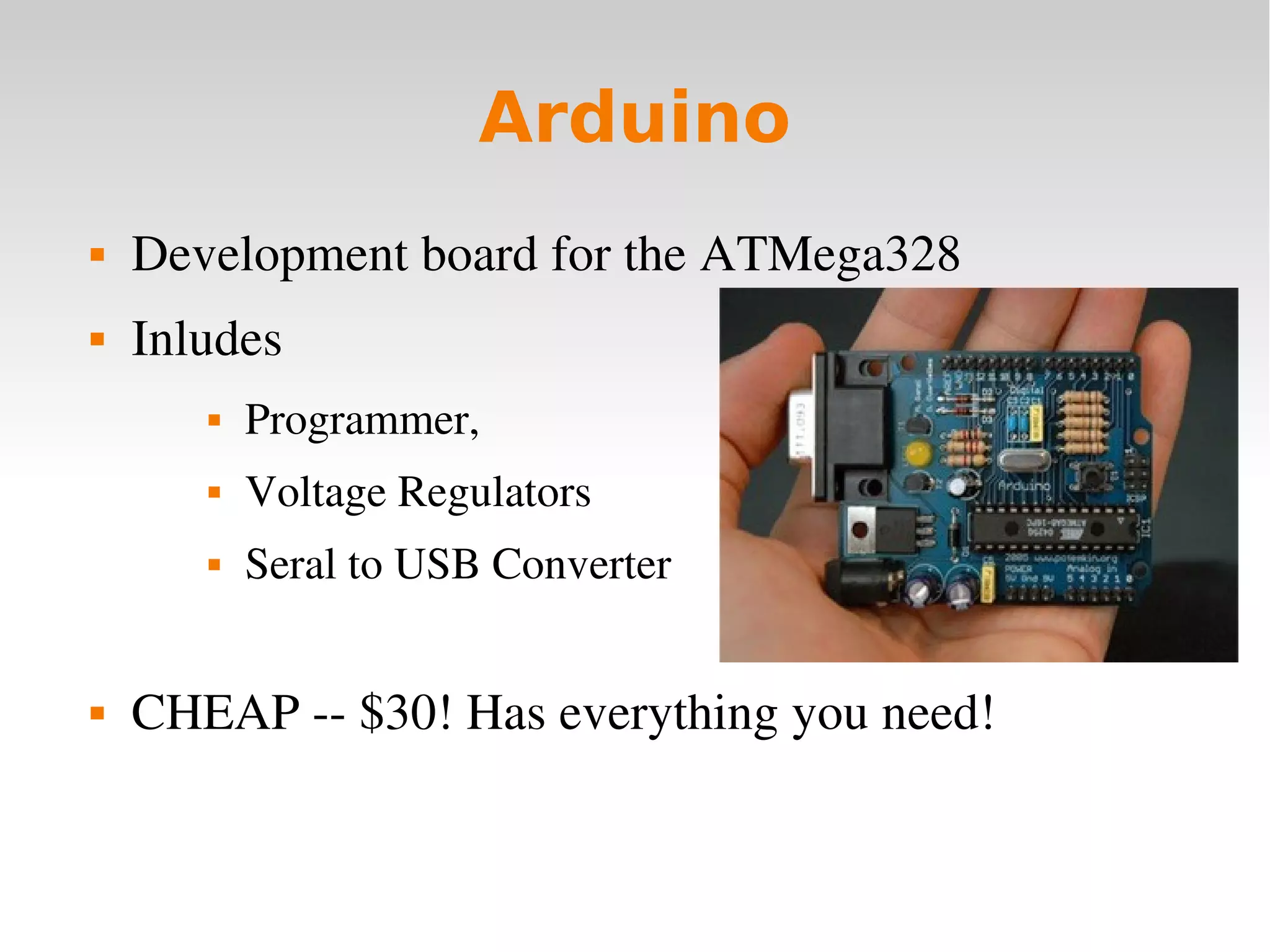
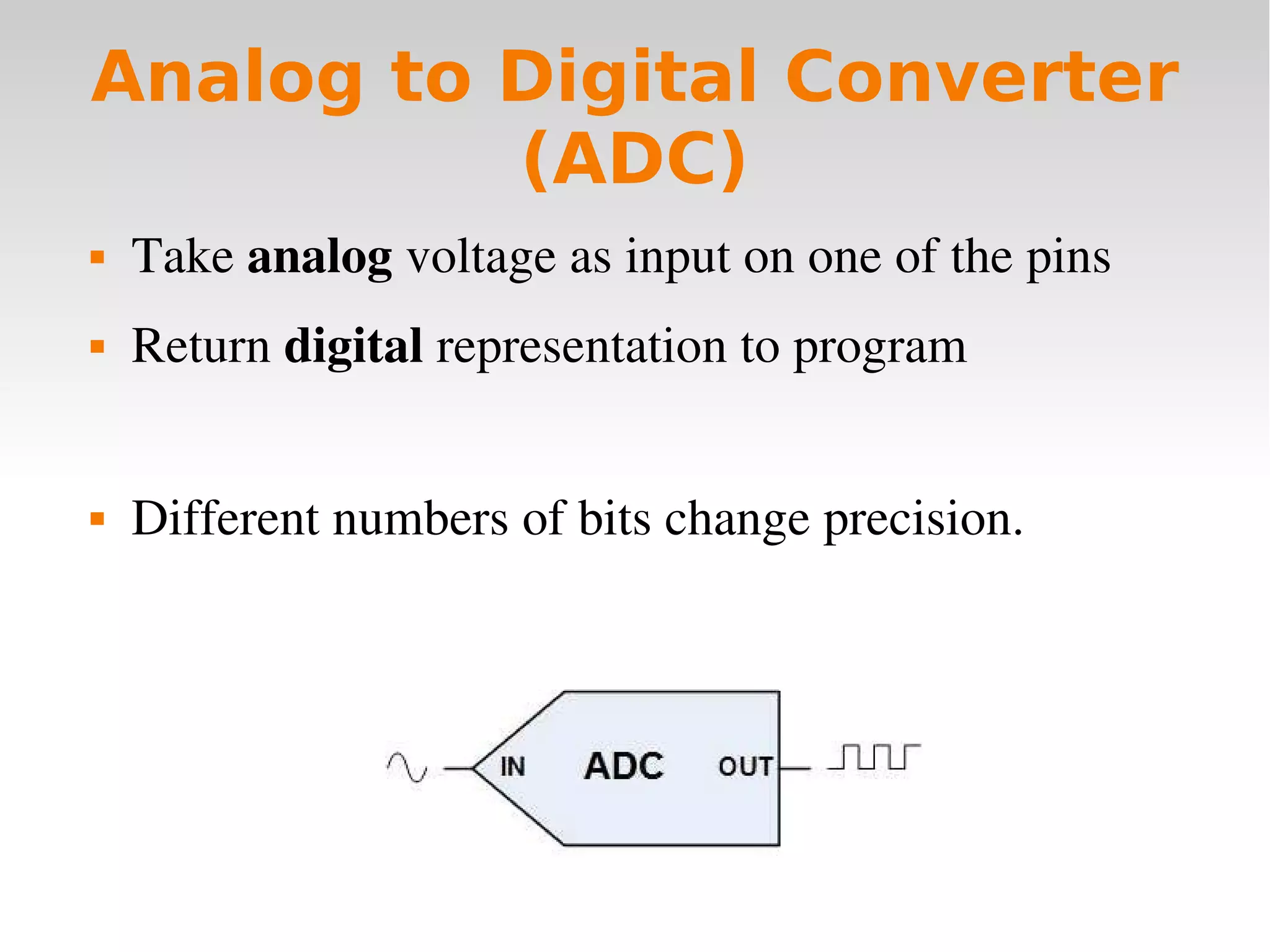
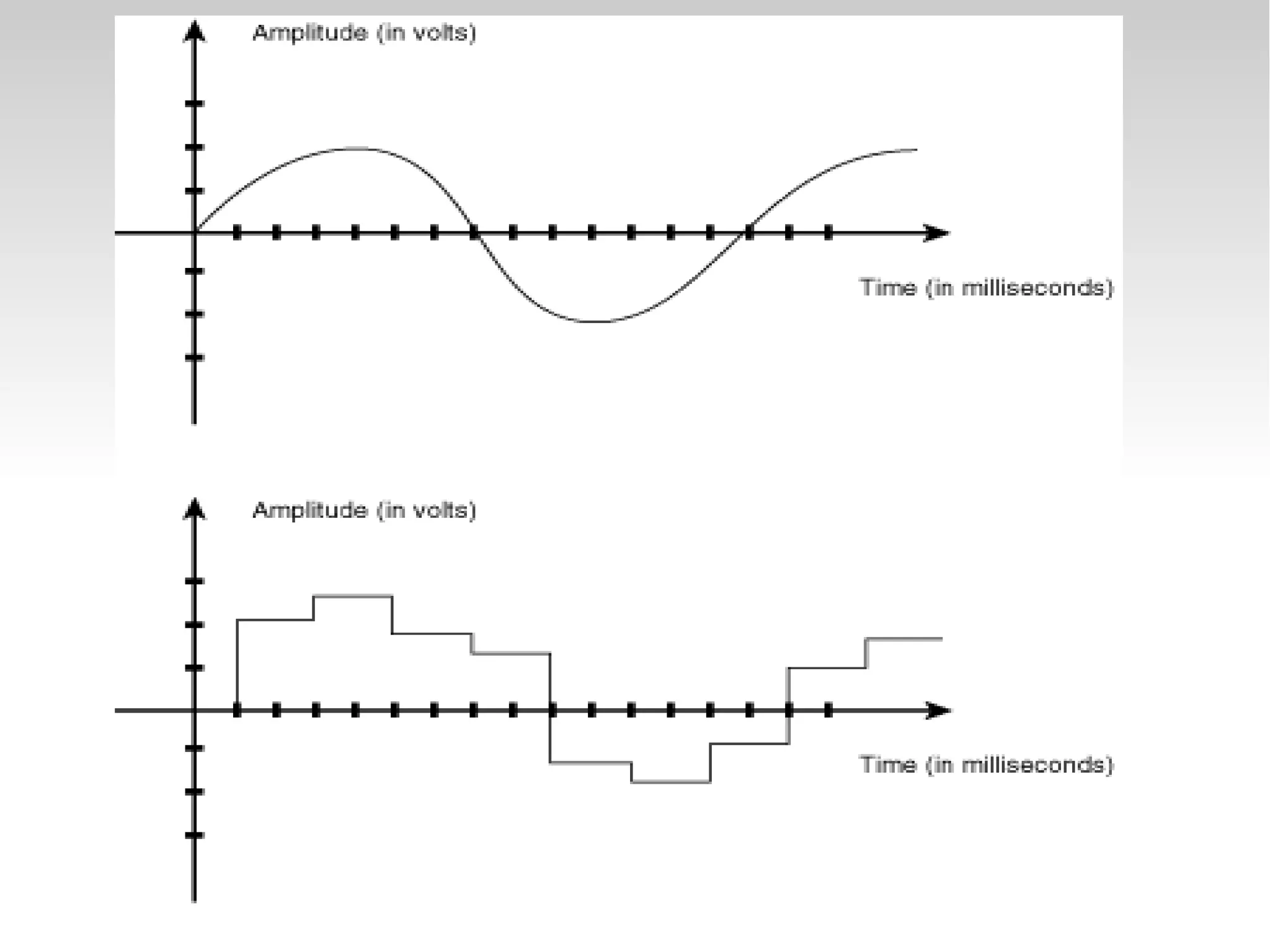
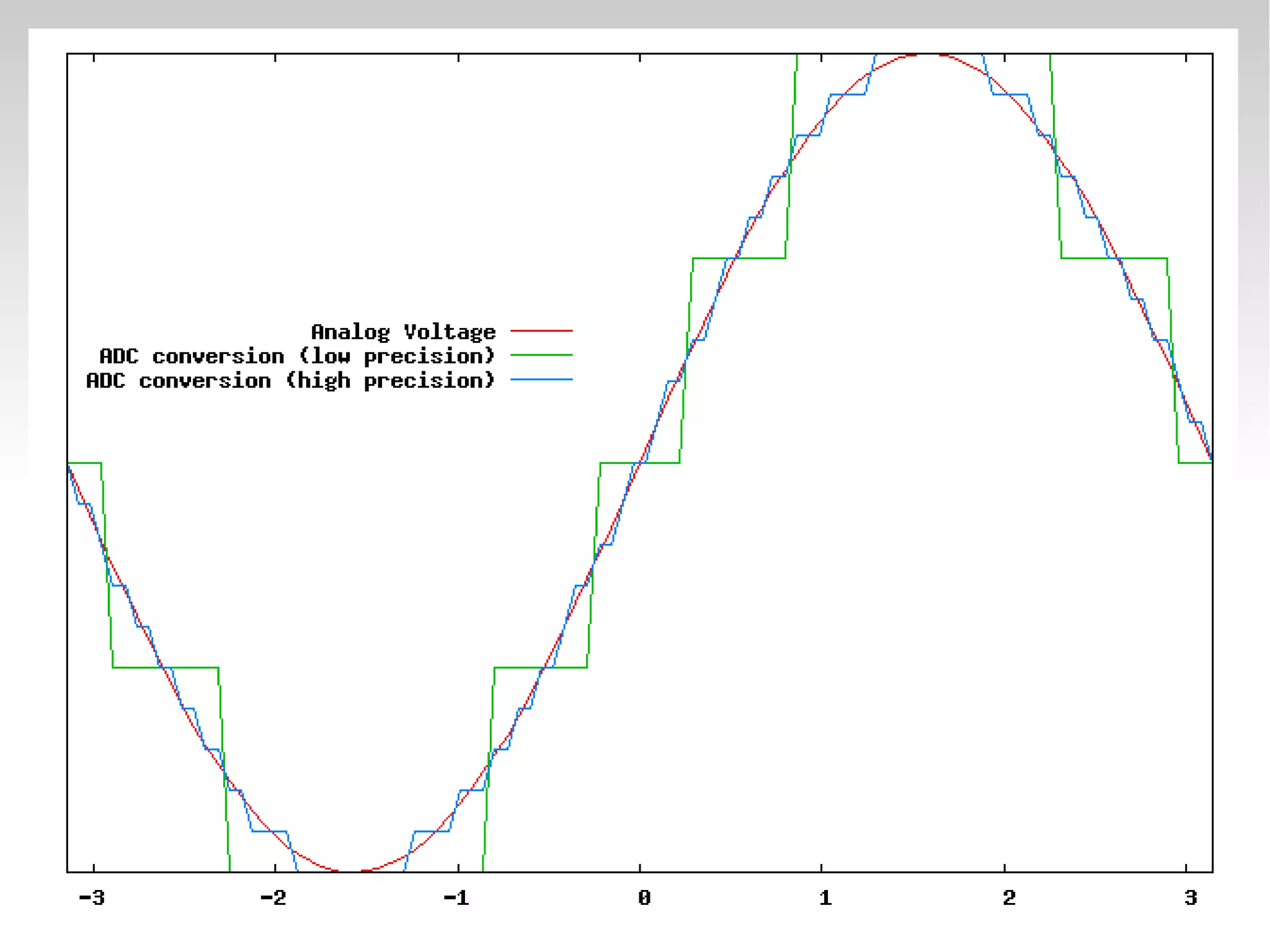
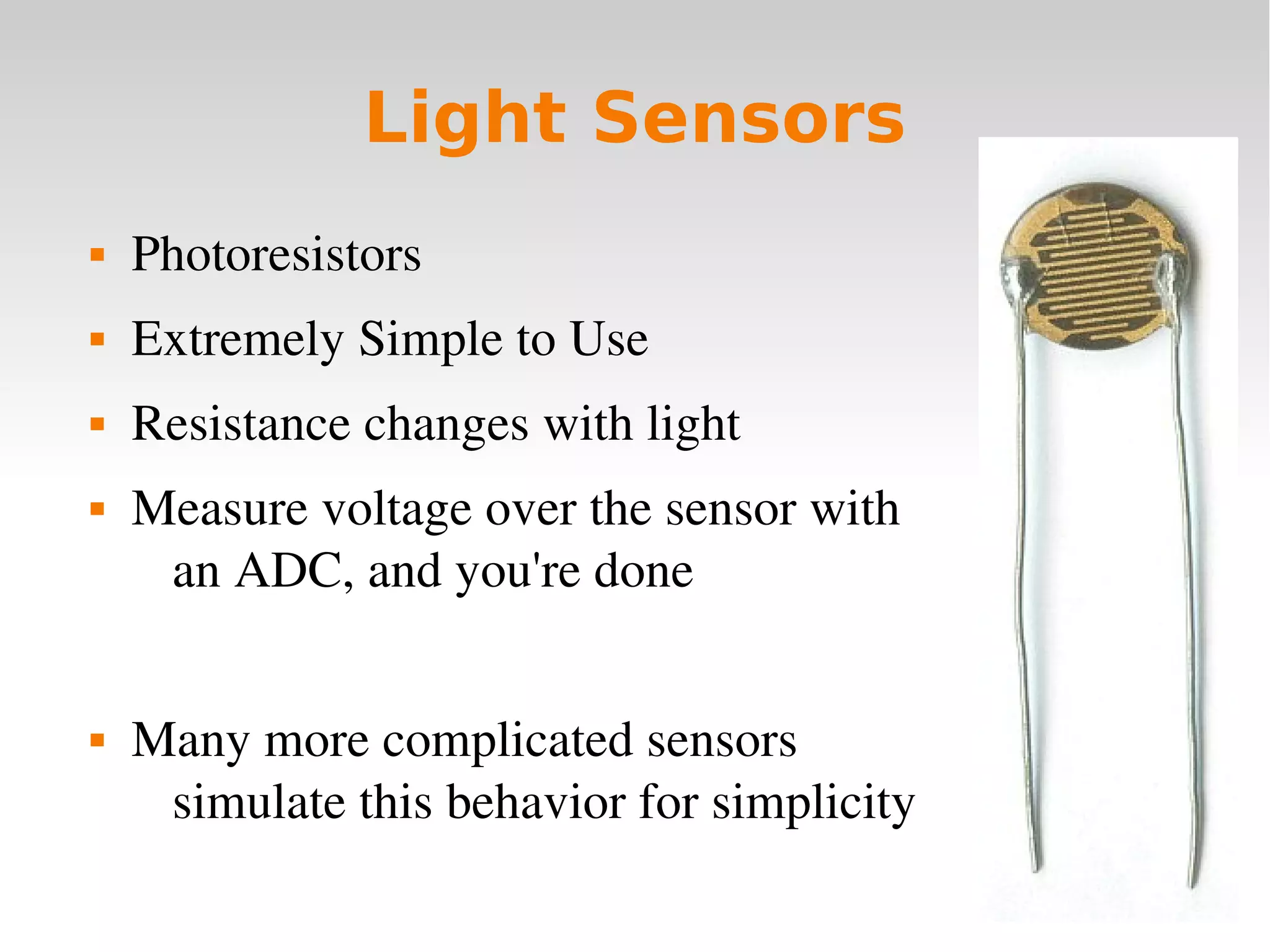
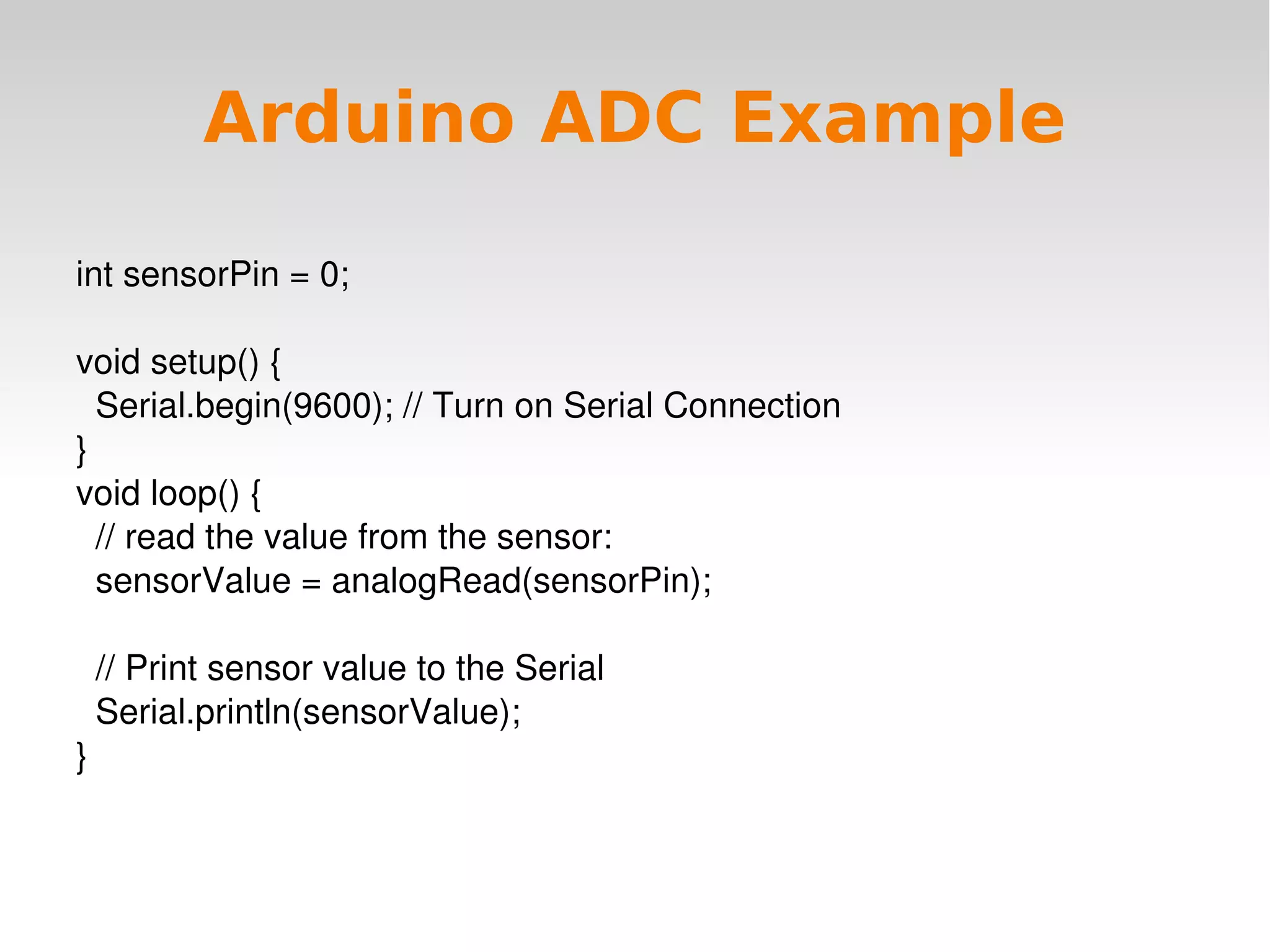
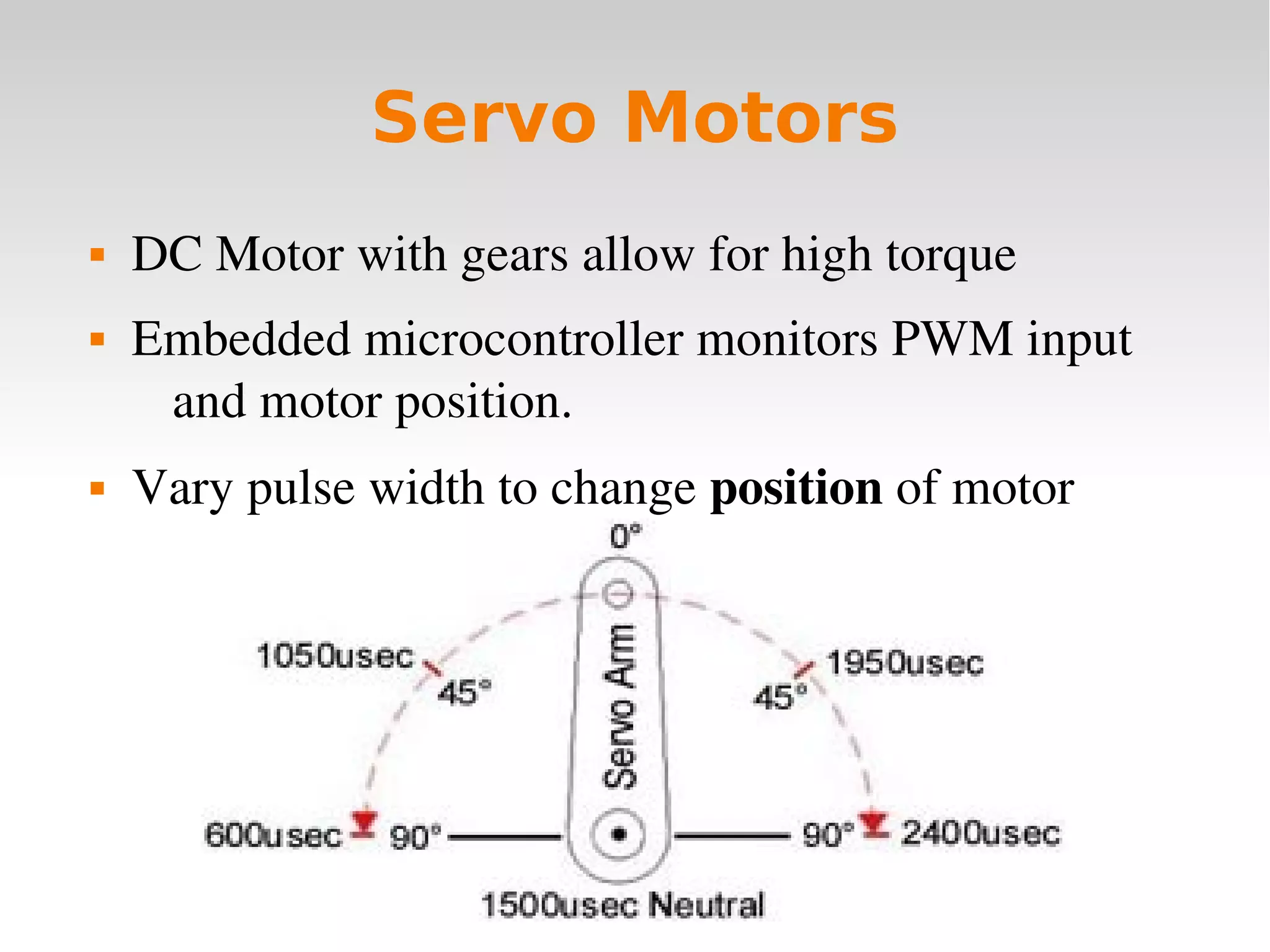
This document provides an overview of microcontrollers and introduces the Arduino microcontroller development platform. It discusses how microcontrollers can receive sensory input from the environment using sensors like light sensors. It also covers digital and analog input/output, serial communication, pulse width modulation (PWM) to control motors, and includes examples of coding with the Arduino.