Downloaded 15 times




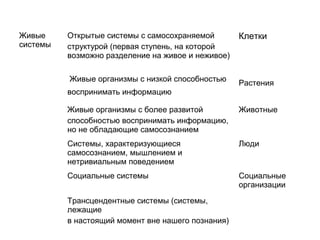



















Документ рассматривает классификацию систем на основе различных принципов, включая предметные и категориальные классификации. Он выделяет несколько типов систем, основываясь на их характеристиках и природе, таких как простые, сложные, детерминированные и вероятностные. Также обсуждаются особенности управления системами и различные виды информационных систем.














































