
Recommended
More Related Content
Similar to 18 meo114t 3 actual syllabus modern control theory
Similar to 18 meo114t 3 actual syllabus modern control theory (20)
Recently uploaded
Recently uploaded (20)
18 meo114t 3 actual syllabus modern control theory
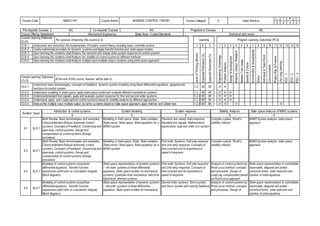
- 1. Course Code 18MEO114T Course Name MODERN CONTROL THEORY Course Category O Open Elective L T P C 3 0 0 3 Pre-requisite Courses NIL Co-requisite Courses NIL Progressive Courses NIL Course Offering Department Mechanical Engineering Data Book / Codes/Standards Statistical data books Course Learning Rationale (CLR): The purpose of learning this course is to: Learning Program Learning Outcomes (PLO) CLR-1 : Understand and remember the fundamentals of modern control theory including basic controller actions 1 2 3 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 CLR-2 : Create mathematical models for dynamic systems and Apply transfer function and state space models Level of Thinking (Bloom) Expected Proficiency (%) Expected Attainment (%) Engineering Knowledge Problem Analysis Design & Development Analysis, Design, Research Modern Tool Usage Society & Culture Environment & Sustainability Ethics Individual & Team Work Communication Project Mgt. & Finance Life Long Learning PSO - 1 PSO - 2 PSO – 3 CLR-3 : Upon learning the students shall Analyze the transient and steady state system response of control systems CLR-4 : Upon learning the students shall Analyze the stability of control system by different methods CLR-5 : Upon learning the students shall Analyze multiple input multiple output systems using state space approach Course Learning Outcomes (CLO): At the end of this course, learners will be able to: CLO-1 : Understand basic terminologies, concepts of feedback, dynamic system modeling using linear differential equations, applytransfer functions for control system 1,2 90 85 H H CLO-2 : Understand modeling in state space, apply state space model and evaluate different mechanical systems 1,2 85 80 H H H CLO-3 : Understandstandard test signals, apply and evaluate system response for first and second order systems 1,2,3 85 80 H H H CLO-4 : Understand, apply, and create optimal control systems based on stability analysis by different approaches 1,2,3 85 80 H H H CLO-5 : Analyze the multiple input multiple output dynamic systems based on state space approach, apply Kalman and Gilbert test 1,2,3 90 85 H H H H Duration (hour) Introduction to control systems System Modeling System response Stability Analysis State space analysis of MIMO systems 9 9 9 9 9 S-1 SLO-1 Brief Review, Basic terminologies and examples, Classical-Modern-Robust-Automatic control systems, Concepts of Feedback: Closed-loop and open-loop control systems, Design and compensation of control systems (Design procedure) Modeling in state space: State, State variables, State vector, State space, State equations for a MIMO system Transient and steady state response, Standard test signals- Mathematical expressions- type and order of a system Complex s-plane, Routh’s stability criterion MIMO System analysis: state-space approach S-2 SLO-1 Brief Review, Basic terminologies and examples, Classical-Modern-Robust-Automatic control systems, Concepts of Feedback: Closed-loop and open-loop control systems, Design and compensation of control systems (Design procedure) Modeling in state space: State, State variables, State vector, State space, State equations for a MIMO system First order Systems: Unit step response and Unit ramp response, Concepts of time constant and its importance in speed of response Complex s-plane, Routh’s stability criterion MIMO System analysis: state-space approach S-3 SLO-1 Modeling of control systems using linear differential equations, Transfer function expressions (with note on convolution integral), Block diagrams State space representation of dynamic systems – nth order systems of linear differential equations, State space models for mechanical systems: Examples from mechanical, electrical, liquid-level, thermal systems First order Systems: Unit step response and Unit ramp response, Concepts of time constant and its importance in speed of response Analysis of control systems by Root-Locus method: concepts and procedure, Design of Lead-Lag compensation based on Root-Locus approach State space representation in controllable, observable, diagonal and jordan canonical forms, order reduction and solution of state equations S-4 SLO-1 Modeling of control systems using linear differential equations, Transfer function expressions (with note on convolution integral), Block diagrams State space representation of dynamic systems – nth order systems of linear differential equations, State space models for mechanical Second order systems: Servo system and Servo system with velocity feedback Analysis of control systems by Root-Locus method: concepts and procedure, Design of State space representation in controllable, observable, diagonal and jordan canonical forms, order reduction and solution of state equations
- 2. Duration (hour) Introduction to control systems System Modeling System response Stability Analysis State space analysis of MIMO systems 9 9 9 9 9 systems: Examples from mechanical, electrical, liquid-level, thermal systems Lead-Lag compensation based on Root-Locus approach S-5 SLO-1 Basic Control action: Types of controllers, Principles of pneumatic, hydraulic and electronic controllers State space representation of dynamic systems – nth order systems of linear differential equations, State space models for mechanical systems: Examples from mechanical, electrical, liquid-level, thermal systems Second order systems: Servo system and Servo system with velocity feedback Analysis of control systems by Root-Locus method: concepts and procedure, Design of Lead-Lag compensation based on Root-Locus approach Controllability and observability, Kalman and Gilbert test S-6 SLO-1 Basic Control action: Types of controllers, Principles of pneumatic, hydraulic and electronic controllers State space representation of dynamic systems – nth order systems of linear differential equations, State space models for mechanical systems: Examples from mechanical, electrical, liquid-level, thermal systems Second order systems: Servo system and Servo system with velocity feedback Stability: Polar, Bode and Nyquistplots Controllability and observability, Kalman and Gilbert test S-7 SLO-1 Basic Control action: Types of controllers, Principles of pneumatic, hydraulic and electronic controllers State space representation of transfer function systems Controller errors, Higher order systems, Effects of proportional-integral-derivative control actions on the system response Stability: Polar, Bode and Nyquistplots Pole placement approach to the design of control systems, State observers, Design of servo systems S-8 SLO-1 Tuning of PID controller: Ziegler-Nichols rules State space representation of transfer function systems Controller errors, Higher order systems, Effects of proportional-integral-derivative control actions on the system response Lead-Lag compensation based on frequency response approach Pole placement approach to the design of control systems, State observers, Design of servo systems S-9 SLO-1 Tuning of PID controller: Ziegler-Nichols rules Linearisation of a non-linear system Controller errors, Higher order systems, Effects of proportional-integral-derivative control actions on the system response Lead-Lag compensation based on frequency response approach Pole placement approach to the design of control systems, State observers, Design of servo systems Learning Resources 1. K. Ogata - ‘Modern Control Engineering - Prentice Hall (India) - Pearson Education - 2009 - 5th Edition 2. Francis. H. Raven - ‘Automatic Control Systems’ – McGraw Hill - 1995 - 5th Edition 1. B. C. Kuo - ‘Automatic Control Systems’ - Wiley - 2009 - 9th Edition 2. Schaum’s Series - ‘Feedback and Control Systems’ – McGraw Hill Education - 2013 - 2nd Edition 3. I. J. Nagarath& M. Gopal - ‘Control Systems’ - New age International Publishers. 4. Norman Nise- ‘Control Systems Engineering’ - Wiley and Sons - 2015 - 7thEdition 5. Rihard C. Drof and Robert. H. Bishop Addison - ‘Modern Control Systems’ – Wesley – 2010 - 12th Edition Learning Assessment Level of Thinking Continuous Learning Assessment (50%) Final Examination (50%) CLA – 1 (10%) CLA – 2 (15%) CLA – 3 (15%) CLA – 4 (10%) # Level 1 Remember 40 % 30 % 30 % 30 % 30 % Understand Level 2 Apply 40 % 40 % 40 % 40 % 40 % Analyze Level 3 Evaluate 20 % 30 % 30 % 30 % 30 % Create Total 100% 100% 100% 100% 100% # CLA – 4 can be from any combination of these: Assignments, Seminars, Tech Talks, Mini-Projects, Case-Studies, Self-Study, MOOCs, Certifications, Conf. Paper etc., Course Designers Experts from Industry Experts from Higher Technical Institutions Internal Experts 1. Dr.R.Kalimuthu, ISRO, Mahendragiri, r_kalimuthu@vssc.gov.in 1. Dr. BIJAY KUMAR ROUT, BITS, Pilani Dr C. Shravankumar, SRMIST 2. Dr.A.Velayutham, DRDO, Avadi, velayudham.a@cvrde.drdo.in 2. Dr.R.Prabhusekar, rprabhusekar@mnnit.ac.in, MNNITAllahabad Dr. P. Nandakumar, SRMIST