86Duino 特色 (2/2)
軟體
相容 Arduino 的開發環境
完整相容 Arduino 程式語法、API、標準函式庫
額外內建 33 個 Arduino 相容函式庫
完完全全 Made In Taiwan(連 CPU 也是 Made In
Taiwan,板子上的零件多數也是 Made In Taiwan)
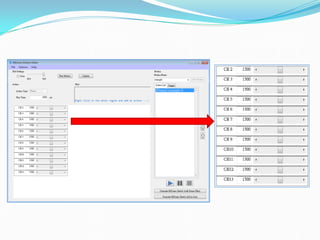
在 Arduino和 86Duino 上只使用 1 個 servo pin, 並量測
輸出的 PWM duty 與目標值的誤差,所測得的數據如下:
各板子的 PWM Duty 抖動實測 (1/2)
板子 目標
duty
實際量測值 duty
誤差範圍最小 最大
Arduino UNO 1000 us 1000.04 us 1006.42 us 約 6 ~ 7 us
Arduino
Leonardo
1000 us 1000.04 us 1007.92 us 約 7 ~ 8 us
Arduino DUE 1000 us 998.200 us 998.280 us 約 1 ~ 2 us
Arduino
Mega2560
1000 us 1001.12 us 1008.87 us 約 8 ~ 9 us
86Duino 1000 us 998.64 us 1001.1 us 約 1 ~ 2 us **
** 在 86Duino 有標註硬體 PWM 功能的 I/O pin 上, 誤差則是 0
237.
在 ArduinoDUE / Mega2560 和 86Duino 上啟用 45 組
servo pins, 並量測其中一個 pin 輸出的 PWM duty 與目
標值的誤差, 所測得的數據如下表所示:
各板子的 PWM Duty 抖動實測 (2/2)
板子 目標 duty 實際量測值 duty 誤差範圍
最小 最大
Arduino DUE 1000 us 998.05 us 1004.68 us 約 2 ~ 5 us
Arduino
Mega2560
1000 us 1001.09 us 1076.96 us 約 1 ~ 77 us
86Duino 1000 us 998.70 us 1001.31 us 約 1 ~ 2 us
Arduino 的 Servo 函式庫在超過 12 組 channels 時, 會啟用 2 組以上 Timer
中斷, 以上表格可以看出多組 Timer 中斷互相影響所造成的 jitter 惡化情形



































































































































































































































































































































































































































































![ServoFrame 函式
ServoFrame 類別
positions[]
setPositions()
playPositions()
load()
save()](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-471-320.jpg)
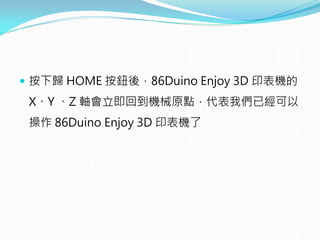
![positions[]
儲存所有伺服機位置的列表。最多 45 顆伺服機。
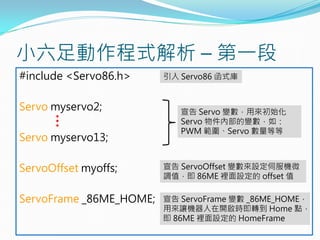
#include <Servo86.h>
Servo myservo0; Servo myservo1; Servo myservo2;
ServoFrame myframe; // 宣告一個 Frame 物件
void setup()
{
myservo0.attach(9); myservo1.attach(11); myservo2.attach(5);
myframe.positions[0] = 1800; // 設定 Frame 內容
myframe.positions[1] = 1300;
myframe.positions[2] = 2000;
// 設定以 500ms 的時間將伺服機轉動到 Frame 指定的位置 (myservo0 轉動到 position[0]
// 位置, myservo1 轉動到 position[1] 位置, myservo2 轉動到 position[2] 位置)
myframe.setPositions(500, myservo0 , myservo1, myservo2);
servoMultiRun(); // 根據設定值轉動所有伺服機
}
void loop() {}](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-472-320.jpg)

![#include <Servo86.h>
Servo myservo0; Servo myservo1; Servo myservo2;
ServoFrame myframe; // 宣告一個 Frame 物件
void setup()
{
myservo0.attach(9); myservo1.attach(11); myservo2.attach(5);
myframe.positions[0] = 1800; // 設定 Frame 內容
myframe.positions[1] = 1300;
myframe.positions[2] = 2000;
// 設定以 500ms 的時間將伺服機轉動到 Frame 指定的位置 (myservo0 轉動到 position[0]
// 位置, myservo1 轉動到 position[1] 位置, myservo2 轉動到 position[2] 位置)
myframe.setPositions(500, myservo0 , myservo1, myservo2);
servoMultiRun(); // 根據設定值轉動所有伺服機
}
void loop() {}](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-474-320.jpg)

![#include <Servo86.h>
Servo myservo0; Servo myservo1; Servo myservo2;
ServoFrame myframe; // 宣告一個 Frame 物件
void setup()
{
myservo0.attach(9); myservo1.attach(11); myservo2.attach(5);
myframe.positions[0] = 1800; // 設定 Frame 內容
myframe.positions[1] = 1300;
myframe.positions[2] = 2000;
// 以 500ms 的時間將伺服機轉動到 Frame 指定的位置 (myservo0 轉動到 position[0]
// 位置, myservo1 轉動到 position[1] 位置, myservo2 轉動到 position[2] 位置)
myframe.playPositions(500, myservo0 , myservo1, myservo2);
}
void loop() {}](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-476-320.jpg)
![save()
儲存目前的 Frame 至指定檔案
輸入參數:86Duino Frame 檔名
#include <Servo86.h>
Servo myservo1; Servo myservo2; Servo myservo3;
ServoFrame myframe;
void setup()
{
myservo1.attach(9); myservo2.attach(11); myservo3.attach(5);
myframe.positions[0] = 1800; // 設定 Frame 內容
myframe.positions[1] = 1300;
myframe.positions[2] = 2000;
myframe.save(“frm0.txt”); // 將動作幀儲存至 SD 卡根目錄下的 "frm0.txt"
}
void loop() {}](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-477-320.jpg)




![ServoFramePololu 函式
ServoFramePololu 類別
positions[] – 功能與 ServoFrame 一樣
setPositions() – 功能與 ServoFrame 一樣
playPositions() – 功能與 ServoFrame 一樣
load() - 讀取 Pololu 的 .txt Frame 檔
save() – 功能與 ServoFrame 一樣](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-482-320.jpg)




![ServoFrameInno 函式
ServoFrameInno 類別
positions[] – 功能與 ServoFrame 一樣
setPositions() – 功能與 ServoFrame 一樣
playPositions() – 功能與 ServoFrame 一樣
load() - 讀取 Innovati 的 .ftxt Frame 檔
save() – 功能與 ServoFrame 一樣](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-487-320.jpg)




![KONDO Frame 函式
ServoFrameKondo 類別
positions[] – 功能與 ServoFrame 一樣
setPositions() – 功能與 ServoFrame 一樣
playPositions() – 功能與 ServoFrame 一樣
load() - 讀取 KONDO 的 .RCB Frame 檔
save() – 功能與 ServoFrame 一樣
capture() – 抓取 KONDO 伺服機目前角度(KONDO
伺服機專用的位置抓取函式)](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-492-320.jpg)






![#include <Servo86.h>
Servo myservo0; Servo myservo1; Servo myservo2;
ServoFrameKondo myframe;
void setup()
{
myservo0.attach(9); myservo1.attach(11); myservo2.attach(5);
// 分別讀取 myservo0、myservo1、myservo2 的回傳角度
myframe.positions[0] = myframe.capture(myservo0);
myframe.positions[1] = myframe.capture(myservo1);
myframe.positions[2] = myframe.capture(myservo2);
Serial.println(myframe.positions[0]);
Serial.println(myframe.positions[1]);
Serial.println(myframe.positions[2]);
myframe.save(“captured_frame.txt”);
}
void loop() {}](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-500-320.jpg)








![void setup()
{
myservo2.attach(2);
myservo13.attach(13);
myoffs.offsets[1] = -140;
myoffs.offsets[3] = -50;
myoffs.offsets[5] = -50;
myoffs.offsets[7] = -90;
myoffs.offsets[9] = -110;
myoffs.offsets[11] = -100;
…
初始化 Servo pin,這裡用到 pin
2 ~ pin 13,共 12 個 pins
初始化每個 pin 上伺服機的偏轉
角度,offset[0] 對應至 pin 2,
offset[1] 對應至 pin 3 … 依此類
推,不需要改變微調值的 pin 可
以跳過不設定,其預設值為 0,
例如左邊沒列出的 offset[0]、
offset[2]、 offset[4] 等值皆為 0
小六足動作程式解析 – 第二段](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-511-320.jpg)
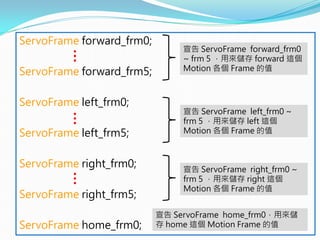
![forward_frm0.positions[0] = 1700;
forward_frm0.positions[11] = 1700;
forward_frm1.positions[0] = 1700;
myoffs.setOffsets();
_86ME_HOME.playPositions(0);
} //end of setup
…
設定 forward 動作的第一個
frame ,所有伺服機的角度
依此類推,後面依序設定 left、right、home 各
個 Motion 所有 frame 的伺服機角度
………
將上一頁設定的所有 offset 值設定至伺服機
播放小六足的 homeframe,即
86ME 中設定的 HomeFrame,
讓小六足接電後便自動調整到
HOME 的姿勢
設定 forward 動作的第二個
frame ,所有伺服機的角度](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-512-320.jpg)







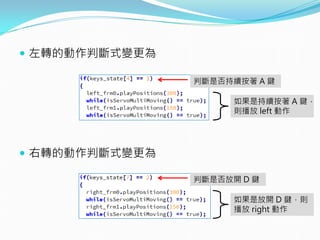
![回傳 0 代表第一次按下
回傳 1 代表持續按著
回傳 2 代表放開
共可判斷 128 個按鍵,陣列中的元素號碼對應到
一個鍵盤按鍵,例如:key_state[4] 為鍵盤 A 的狀
態
當鍵盤按鍵被按下時,按下的按鍵會
即時儲存至 current_key 變數中
按鍵的按下狀態,1 為按下,0 為放開
非以上狀態回傳 3
判斷是否第一次按下
判斷是否持續按著
判斷是否放開](https://image.slidesharecdn.com/86hexapodtutorial-151006130842-lva1-app6892/85/86Duino-DIY-520-320.jpg)