TeleRemote Control Advances for Mining Operations
•
0 likes•24 views

Buen libro de investigación

Recommended
Recommended
More Related Content
What's hot
What's hot (16)
Similar to TeleRemote Control Advances for Mining Operations
Similar to TeleRemote Control Advances for Mining Operations (20)
Recently uploaded
Recently uploaded (20)
TeleRemote Control Advances for Mining Operations
- 1. TeleRemote Control - It Comes of Age Thomson Technology Ltd. 260 Fielding Rd., Lively, (Sudbury) Ontario Canada P3Y 1L6 DECEMBER 3, 1997 Proprietary Notice This document contains information proprietary to Thomson Technology Ltd.. Disclosure of this documentation to third parties without the prior written permission of the President of Thomson Technology Ltd., is expressly prohibited. TtechThomson Technology Ltd.
- 2. TeleRemote Control - It Comes of Age Page - 2 Thomson Technology Ltd.- Proprietary Information Abstract Line-of-sight radio control has received widespread acceptance for use in many mining methods because today’s technology offers improved economics and personnel safety. Significant advances in higher au- tonomy for mining machines are not currently seeing widespread use even though they offer great future potential. With autonomous capabili- ties being a longer-term goal, a logical sequence of advances based on TeleRemote control is proposed. Under TeleRemote control, the operator is in direct control of the machine at all times. Three levels of TeleRemote control systems are presented including line-of-sight, extended line-of- sight, and full load-haul-dump applications. Distributed control and sensing subsystems arranged in a vehicle control area network support incremental system expansion through the three levels of TeleRemote control and prepare the machine for integration of higher levels of automation as mature technology becomes available. This approach allows full exploitation of today’s mining automation technology with a flexible future growth path.
- 3. TeleRemote Control - It Comes of Age Page - 3 Thomson Technology Ltd.- Proprietary Information Table of Contents 1. INTRODUCTION ....................................................................................... 4 2. TELEREMOTE SYSTEM ADVANCES ................................................... 6 3. TELEREMOTE CONTROL SYSTEMS .................................................. 7 3.1 MACHINE MECHATRONICS ............................................................................... 7 3.2 COMMUNICATIONS SYSTEMS ............................................................................ 13 3.3 HUMAN MACHINE INTERFACE .......................................................................... 14 4. CONCLUSIONS .......................................................................................... 15 5. REFERENCES ............................................................................................ 16
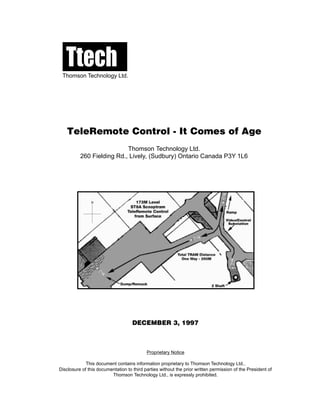
- 4. TeleRemote Control - It Comes of Age Page - 4 Thomson Technology Ltd.- Proprietary Information Introduction The use of remote control systems for mining machines is gaining momentum rapidly as the technology becomes more capable. This increased capability is a logical development spurred on by the demand of mine operators to improve methods for bulk extraction and ore recovery, and to increase utilization of mining machines. Radio controlled loading, introduced in the mid-seventies for Load Haul Dump (LHD) machines, enabled mines to refine existing mining methods and introduce new methods with improved safety and economics. Examples include: • Longhole Stoping – improved ore recovery with remote controlled LHDs from standard drawpoints with reduced risk to personnel; • Vertical Retreat Mining — with minimal drawpoints in narrower ore bodies up to 10 m wide, the application of remote control avoids drifting in waste to establish drawpoints while recovering more of the ore; • Vertical Retreat Pillar Recovery – recovery of ore remnants abutting backfilled stopes. Figure 1 illustrates the general mucking process and the need for remote control of the LHD for operation in the stope. The operator controls the loading process from a safe point in the drift using radio controlled loading. Figure 1: Mining methods, such as vertical crater retreat, are conducted more efficiently and safely with the LHD operating under TeleRemote line-of-sight control in the stope areas.
- 5. TeleRemote Control - It Comes of Age Page - 5 Thomson Technology Ltd.- Proprietary Information Remote control technology used in these examples provides a Line-of-Sight (LOS) radio link between the operator and the LHD. The operator is present at the mucking zone to directly observe and control the LHD, but is removed from hazardous areas. The maximum safe distance an LHD can be operated line-of-sight is about 200 meters. At this and greater distances the operator cannot clearly see the action of the machine. Typical use of 450 MHz in radio control equipment does not travel reliably around sharp corners. These restrictions combine to result in limited efficiency and ore recovery, and limit the applications of LOS radio control. After loading, the operator assumes manual control to tram the unit to the dump point. This transfer cycle from radio to manual control and back again causes a loss of time in the mucking cycle and affects the productivity of the LHD. However, these mining methods are only possible because of the application of LOS radio controls and provide a significant return on investment. Today, LOS remote control technology is widely accepted, not only for use on LHDs, but for other mining equipment including locomotives, rockbreakers, drills, bolters, etc. The success of LOS radio control naturally sparks visions of fully autonomous machines with reduced need for underground personnel. Fully autonomous operation, however, requires a large investment in technology and a dedicated mine plan. Several R&D initiatives have demonstrated autonomous tramming , but these systems typically require added infrastructure for light tracks or guide wires (Vagenas, 1996). Multiple ma- chine operation by a single operator also requires a guidance infrastructure to allow machines to operate autonomously while tramming. This technology is not widely accepted at this time, however, it holds great future promise depending on further R&D initiatives, support, and demonstrated success. This paper outlines recent advances in TeleRemote control systems for mining equipment. With autonomous capabilities being a longer-term goal, we present a logical sequence of advances for radio control technology to extend the operating range of the remotely controlled machine to go around corners and travel greater distances. TeleRemote control places the operator in direct control of the machine in remote operations thereby eliminating the need for an autonomous mode. TeleRemote LOS control refers to the limited LOS radio control capability discussed above, where the operator directly observes and controls the LHD, but is removed from hazardous areas. An improved capability level, which we refer to as TeleRemote Extended Line-of-Sight (ELOS), still requires that the operator be present near the mucking zone, but provides more advanced control and operator feedback to overcome some of the limitations of LOS control. TeleRemote ELOS control extends capability to allow the operator to control the machine at greater distances and in areas not directly in line-of-sight. Manual hauling to the dump site would normally be used with TeleRemote ELOS control. A further capability level, which we refer to as TeleRemote Load-Haul-Dump (LHD) control, provides the capability to execute the complete hauling cycle through TeleRemote control. TeleRemote LHD systems provide both machine electronics and an operator interface with advanced capabilities to support the com- plete hauling cycle. The operator could be stationed underground near the operational area or on surface. TeleRemote LHD control does not require the use of a guidance system nor a mine-wide communications backbone, therefore the capital cost and maintenance of the system is greatly reduced. TeleRemote LOS, ELOS, or LHD control capabilities enable new alternatives in mining methods with economic returns realized through reduced development costs, improved ore recovery, increased productivity through more efficient use of machinery, and improved personnel safety. Today, robust TeleRemote control technology for all of these capability levels is available.
- 6. TeleRemote Control - It Comes of Age Page - 6 Thomson Technology Ltd.- Proprietary Information TeleRemote System Advances Research and development of TeleRemote, teleoperated, and semi-autonomous underground mobile equip- ment has been an area of substantial work in recent years. In 1990, LKAB tested a teleoperated LHD with automated haulage at the Kiruna Mine in Sweden (Eriksson and Kitok, 1991). The prototype, developed with the Toro LHD manufacturer, mucked a total of 50,000 tonnes of ore before the project was completed. Ve- hicle guidance was provided by a guide wire in a concrete road bed. The project was not continued due to the infrastructure requirements of the guidance system and insufficient speed (12 km/hr) for the mine’s needs. Also in 1990, Vielle Montagne Sverige developed and tested a teleoperated, guided LHD at the Zinkgruvan Mine in Sweden (Vagenas at al., 1991). Guidance was achieved by cameras detecting a white line painted on the back (roof) of the drift and top speeds of approximately 8 km/hr were attained. The Lulea University of Technology was heavily involved with this project. The prototype hauled 1,200 buckets over a nine month project test period. In 1991, Mount Isa Mines in Australia developed a teleloader at the Hilton Mine (Chadwick, 1992). This LHD teleoperation system uses two cameras, mounted front and back, and does not incorporate any guidance. Teleloaders have become integrated into the mine operations. Mintronics (Brophey and Euler, 1993) began development of the Opti-Trak guidance system for underground truck haulage in 1987 and the system has been commercially available since 1992. The guidance system uses front and rear mounted scanning lasers on the vehicle to follow a reflective tape reference strip mounted on the drift back. A number of vehicle control functions are initiated based on reflective bar codes mounted beside the reference strip. Inco Limited in Sudbury Ontario commissioned a teleoperated guided LHD in 1992 and added a second in 1993 at the North Mine in Sudbury (Baiden, 1993, Baiden and Henderson, 1994). The guidance system uses two video cameras (one front, one rear) angled up to follow an optical light track suspended from the back of the drift. Inco Limited have successfully demonstrated the ability for one operator to control two machines by hauling automatically between teleoperated loading and dumping. Noranda Limited began testing an optical guideline guidance system for an LHD underground in 1990 and work has been ongoing since then (St-Amant et al., 1990, Grenier et al., 1994). Guidance is achieved by two cameras, pointing up and ahead of the vehicle (one in each direction), detecting a reflective tape strip sus- pended from the back of the drift. Prototype LHD’s and trucks have been used to develop this system at the Mattagami and Brunswick Mines. The system has been performance tested at 15 km./hr. Colorado School of Mines in conjunction with the USBM developed a guidance system for semi-autonomous underground vehicles from 1989 to 1993 (Steele et al., 1991, Lane et al., 1994). The guidance system utilizes ultrasonic ranging sensors to follow the walls of the mine drifts. Work has included testing of ultra- sonic sensors underground and the development and testing of a prototype semi-autonomous mine haul truck in 1993. In 1996, a collaborative Canadian project called “Tele-Remote Assisted Mining (TRAM)” was initiated to develop TeleRemote control technologies and test these in operations of an LHD (Neuburger and Aitken, 1985, Aitken et al., 1996). The TRAM project was launched under PRECARN/PERK sponsorship, an Ontario consortium which sponsors pre-competitive research and development, with project participants Cameco Corporation, Saskatoon, Thomson Technology Ltd., Sudbury, and the Defence Research Establishment Suffield near Medicine Hat, Alberta. The TeleRemote LHD system has completed initial commissioning tests with an interim communications system at Cameco’s Eagle Point Mine in northern Saskatchewan. Extensive
- 7. TeleRemote Control - It Comes of Age Page - 7 Thomson Technology Ltd.- Proprietary Information operational tests are scheduled for early 1998 following installation of a more advanced broadband communi- cations system (Baiden, 1996) now commercially supported by Automated Mining Systems of Aurora Ontario. The harsh mining environment naturally poses significant challenges to TeleRemote control and autonomous guidance. Unlike the known and structured manufacturing environment, where robotic systems perform repetitive functions under constant conditions, mining applications often involve wet operating conditions, changing, uneven and muddy road beds, restricted clearance for sensors above the vehicle, variable video response due to limited lighting conditions, and falling rocks and debris. These factors drive component selection, packaging requirements, sensor selection and positioning, and algorithmic complexity in order to develop systems capable of robust autonomous performance in the unstructured mining environment. Al- though autonomous capability is expected to hold great future promise, careful consideration must be given to creating an economic balance between the needs of mine operators today and the capability of today’s technology. TeleRemote operations, offering LOS, ELOS, or LHD levels of capability, are well suited to today’s technology and mining methods. TeleRemote Control Systems TeleRemote systems are based on trained and skilled human operators who guide the machine from a safe position off of the machine. TeleRemote Line-of-Sight (LOS) control typically only provides very simple machine interfaces and limited information for display to operators since the machine is operating within very limited distances. The next logical advance for this capability is TeleRemote Extended Line-of-Sight (ELOS) control in which the operator controls the machine from a local position, but is provided with video and audio feedback in order to control the machine at greater distances and around corners. Still more advanced capability, referred to here as TeleRemote Load-Haul-Dump (LHD), provides improved functionality not only on the machine but also in the human machine interface or operator control station. TeleRemote LOS and ELOS are used primarily for the loading operation with manual hauling to the dump site. TeleRemote LHD control provides the capability to remove the operator from the machine for the complete hauling cycle. Teleremote systems consist of the following primary components: • Machine mechatronics; • Communications systems; and • Human machine interface. In this section, we expand on these primary components to provide an overview of current capabilities in TeleRemote systems with LOS, ELOS, and LHD levels of capability and functionality. Although many applica- tions can benefit from TeleRemote control, examples provided in the following sections focus primarily on operation of LHDs. Machine Mechatronics Today, machine automation is recognized as a broad field formed from a number of interdisciplinary areas including mechanical design, materials, machining and fabrication, kinematics, dynamics, planning systems, control, sensing, actuation, communications, programming languages, computer architectures, artificial intelligence, and systems integration. The design, development, integration, and deployment of TeleRemote
- 8. TeleRemote Control - It Comes of Age Page - 8 Thomson Technology Ltd.- Proprietary Information mining systems combine aspects of mining, electrical, mechanical, and industrial engineering with computer science, mathematics, physics, and economics. Mechatronics is a relatively new term used to describe an ensemble of some of these cross-disciplinary areas, particularly mechanical and electrical engineering. Mechanical, hydraulic, and engine control interfaces required to prepare a machine for TeleRemote control are now quite mature and are rapidly improving. These interfaces include hydraulic stage kits, as illustrated in Figure 2, to allow both manual and automatic control of hydraulic subsystems, electrical interfaces to elec- tronic fuel-injected engines (such as DDEC engine control), as well as all sensors for machine operations, health and performance monitoring, and all actuators to drive relays or valves to control machine functions. Recent challenges have focused more on electrical interfaces to mechanical subsystems and the exploitation of advances in microcontroller and computer communications technology to improve capabilities, perfor- mance, and reliability of TeleRemote control systems. Figure 2: Proportional electro-hydraulic stage kits used to provide both manual and automatic control of mining equipment. Early LOS control systems used simple RF receivers on-board the vehicle with electronics to directly drive discrete valves. This approach proved the initial concept and viability of LOS control, but could not provide the necessary safety levels and electrical isolation. The next stage of development continued the use of simple RF receivers, but introduced Programmable Logic Controllers (PLCs) to interpret the radio commands and modify them according to a rule-based ladder logic program. This system introduced software logic into radio control and provided improved safety and monitoring of machine health. In 1992, Thomson Technology Ltd. of Sudbury Ontario introduced a commercial “Universal Interface” for remotely controlled LHD’s. A schematic representation of this unit with the machine stage kits is shown in Figure 3. This system is also PLC-based, but standardized the machine valve wiring and electrical interface to the machine wiring harness. This system provides a standard set of rules and methods of wiring that carries across different LHD platforms and inter- faces to standard radio control manufacturers.
- 9. TeleRemote Control - It Comes of Age Page - 9 Thomson Technology Ltd.- Proprietary Information Figure 3: PLC-based LHD Universal Interface system and schematic layout showing standardized connections between the various radios and the PLC, and between the PLC and machine valves and sensors. (Thomson Technology Ltd., Sudbury Ont.). PLC interfaces are attractive because of their low cost, ease of programming, and general acceptance due to
- 10. TeleRemote Control - It Comes of Age Page - 10 Thomson Technology Ltd.- Proprietary Information simple internal functionality. These systems were originally designed for TeleRemote LOS applications. They are typically quit large, have complex internal wiring, and increase the complexity of the machine wiring harness since all electo-mechanical subsystems needed for TeleRemote control parallel the existing machine systems. The PLC-based interface unit is commonly located where space is available with protection from debris or loose. Wiring harnesses are then added to the machine to provide control signals from the radio receiver unit to the PLC, dash interfaces to isolate manual controls, and data and control paths to all sensors and actuators on the machine. The hardwire cabling, although fairly reliable, parallels the existing machine wiring harness and results in more complex trouble shooting and additional down time of the machine for electrical fault isolation and repair. More importantly, PLCs do not offer flexibility to easily adapt to new applications, provide very limited capabilities in machine health and performance monitoring, and do not provide intelligence or upgrade paths to higher automation. Receiver Backplane CAN Interface Cable Power Cable FRONT JUNCTION BOX TO ACTUATORS Steer Right Boom Down Bucket Dump Steer Left Boom Up Bucket Roll Radio On REAR JUNCTION BOX TO ACTUATORS Fire Supp. Accel SBrake Radio On Pbrake Spare Spare Dash Isolation Module . inininininininininininininininininininin RM8877665544332211 8 Isolation Modules (Optional Analog/Discrete Inputs) Manual / Remote Switch D F C E A B NODE 'E' DDEC E LOW HYDRAULIC LEVEL SENSOR ENGINE OIL PRESSURE SENSOR ENGINE COOLANT TEMPERATURE ENGINE OIL TEMPERATURE SENSOR SENSOR VCAN LOW COOLANT LEVEL SENSOR DDEC LOW COOLANT LEVEL SENSOR FE A NODE 'B' TRANSMISIION B FORWARD PRESSURE SWITCH REVERSE PRESSURE SWITCH TRANSMISSION PRESSURE SENSOR TRANSMISSION TEMPERATURE SENSOR D F C E A NODE 'D' BRAKES D BRAKE PRESS. SENSOR SERVICE BRAKE VALVE FIRE SUPPRESSION PARK BRAKE VALVE HYDRAULIC TEMP. SENSOR CAMERA SELECTOR Transmission & CameraBrakes & HydraulicsFuture Expansion CAN Expansion VCAN BASED LINE OF SIGHT RADIO CONTROL EXPANSION TO EXTENDED LINE OF SIGHT Transmitter (Facing Operator) Engine Monitoring & Control Figure 4: TeleRemote LOS control system offering basic machine functionality is shown in the upper half of the figure with dash isolation and electronic interfaces to junction boxes for control of machine valves. TeleRemote ELOS capability is added in the lower half of the figure through distributed control and sensing nodes connected to the main processor with a Vehicle Control Area Network (Thomson Technology Ltd., Sudbury).
- 11. TeleRemote Control - It Comes of Age Page - 11 Thomson Technology Ltd.- Proprietary Information Recent advances in TeleRemote control have replaced the PLC implementation with computer systems, microprocessors, microcontrollers, and distributed control architectures with on-board communication net- works. These systems are better suited to TeleRemote ELOS and TeleRemote LHD control applications. The embedded hardware and software, and the communications architecture support local execution of self diagnostics, control laws, and rule-based safety systems at the node level. Improved capabilities for machine health and performance monitoring can be added as needed through additional nodes which can be adapted to a wide variety of sensors for an array of applications Figure 4 shows a schematic representation of TeleRemote LOS and ELOS distributed control systems. The upper half of Figure 4 includes the operator control pendant and the machine receiver unit. In strict LOS applications, only dash isolation and junction box interfaces are needed to provide basic functionality. Expan- sion for ELOS applications is shown in the lower half of Figure 4. Distributed control and sensing nodes are added as required for engine, transmission, brakes, hydraulics and camera control and sensing. This system, however, still involves added complexity in machine wiring since the original machine wiring harness is retained and that required for TeleRemote operations is added in parallel. In Figure 4, control and sensing nodes are connected through a Vehicle Control Area Network (VCAN). This network supports the Control Area Network (CAN) protocol. CAN is an ISO defined serial communications bus which has high bit rates, high immunity to electrical interference, error detection capabilities, and mes- sage collision arbitration. The CAN communications protocol conforms to the Open Systems Interconnect model and represents the data link and physical layers of this model. CAN communication systems are now an automotive standard with full industry support. Small operating systems running on the microcontrollers at each node control the CAN communications between nodes and allow quick non-invasive diagnostics and software upgrades through the VCAN network. Figure 5 shows a schematic of a distributed Vehicle Control Area Network for TeleRemote LHD control. The system shown in Figure 5 was developed by Thomson Technology Ltd, Sudbury, during participation in the PRECARN TRAM project. In this system the wiring harness of the LHD was replaced by the VCAN system. Existing manual hydraulic controls were replaced with electronic subsytems and a vehicle dash and health monitor was added for manual operation. Interprocessor communications use the CAN protocol, and com- plete machine functionality is provided through VCAN interfaces to machine valves and sensors. This system results in reduced complexity and simplified trouble shooting for electrical subsystems. Full TeleRemote LHD control is provided through an ANCAEUS (Eirich and Kramer, 1991) operator control station described further below. The distributed control and sensing approach described above is well-suited for expansion of capabilities from TeleRemote LOS control (upper half of Figure 4), to TeleRemote ELOS control (lower half of Figure 4) to full TeleRemote LHD control (Figure 5). Moreover, the functionality and flexibility of these systems prepare the machine for integration of higher levels of automation, such as semi-autonomous guidance, by providing an upgrade path through addition of computing and sensing nodes as mature technology becomes available.
- 12. TeleRemote Control - It Comes of Age Page - 12 Thomson Technology Ltd.- Proprietary Information STEER RIGHT B O O M D O W N B O O M U P BUCKET ROLL BUCKET DUMP NEUTRAL F 1 F 2 F 3 R 1 R 2 R 3 MAIN POWER ENGINE STOP CHECK ENGINE OFF ON ENGINE STOP OVERRIDEFIRE SUPPRESSION PARK BRAKE HORN FRONT LIGHTS REAR LIGHTS ENGINE STOP ENGINE START CAN1 GEAR SELECT THROTTLE STEERING CAN 2 DDEC BRAKE BUCKET/ BOOM MAIN POWER DASH SIDE PANEL THROTTLE PEDAL STEERING JOYSTICK BOOM/BUCKET JOYSTICK GEAR SELECTOR BRAKE PEDAL VEHICLE DASH & HEALTH MONITOR BATTERY BATTERY + _ + _ D F C E A NODE 'D' BRAKES CA NODE 'A' STEERING BRAKE PRESSURE SENSOR HORN SERVICE BRAKE VALVE FIRE SUPPRESSION PARK BRAKE VALVE HYDRAULIC TEMPERATURE SENSOR FE A NODE 'C' BOOM / BUCKET C B FE A NODE 'B' TRANSMISIION CLOG FILTER BREAK OUT BOX #1 FILTERS 1,2,5 CLOG FILTER BREAK OUT BOX #2 FILTERS 3,4 ACCUMULATOR PRESSURE SENSOR HYDRAULIC PRESSURE SENSOR FUEL LEVEL SENSOR BREAK OUT BOX STEER LEFT STEER RIGHT BUCKET DUMP BOOM DOWN BOOM UP BUCKET ROLL FORWARD PRESSURE SWITCH REVERSE PRESSURE SWITCH TRANSMISSION PRESSURE SENSOR TRANSMISSION TEMPERATURE SENSOR BREAK OUT BOX REVERSE FORWARD 1st GEAR 2nd GEAR 3rd GEAR FRONT LIGHTS BREAK OUT BOX D F C E A B NODE 'E' ENGINE COOLANT TEMPERATURE SENSOR ENGINE OIL TEMPERATURE SENSOR VCANLOW COOLANT LEVEL SENSOR DDECLOW COOLANT LEVEL SENSOR LOW HYDRAULIC LEVEL SENSOR ENGINE OIL PRESSURE SENSOR HARD WIRED TO START RELAY COIL DDEC REAR LIGHTS REAR JUNCTION BOX DIAGNOSTICS DDEC HARNESS ECM POWER Hydr. Pr. Hydr. T. Coolant T.Accum. Pr. Brake Pr. Trans. Pr. Eng. Oil Pr. Eng. Oil T. Trans. T. Bucket Ang. Boom Ang.. CAN Nodes Battery Fuel Lev. Steer Ang. Clog Filt. Coolant Level OK Hydr. Fluid Level OK DCAB E Isolated Battery Backup Access For Options: • Radio Control • Vehicle Health • Load Weighing • Vehicle Tracking • Traffic Management • TeleRemote Control • Guidance • Obstacle Detection POWER STEER LEFT CAN Figure 5: Distributed control nodes and Vehicle Control Area Network (VCAN) for on-board communications systems can reduce existing wiring complexity and provide superior functionality and flexibility for addition of advanced control and sensing modes (Thomson Technology Ltd., Sudbury Ont.).
- 13. TeleRemote Control - It Comes of Age Page - 13 Thomson Technology Ltd.- Proprietary Information Communications Systems Historically, TeleRemote LOS control has been based on one-way 450MHz communication links from the control pendant transmitter to the receiver on the machine. Low Baud rates without hardware flow control were typical which can result in unnecessary control latency and severe problems due to communications dropouts. Today, commercial smart tranceiving modems are available with superior performance characteris- tics. The system shown in Figure 4, for example, employs tranceivers in the pendant and on the machine with full duplexing links based on 900Mhz frequency hopping (440 channels) spread spectrum methods for robust two-way communications. Frequency hopping with hardware flow control offers some measure of frequency diversity to overcome nulls in the drift. This system has given excellent results for TeleRemote LOS applica- tions. For TeleRemote ELOS applications, control of the LHD may be required at greater distances or out of sight of the operator. To add this capability, as illustrated in the lower half of Figure 4, video subsystems transmit imagery to the operator at the control pendant. Video-audio transmitter/receiver pairs operating at 2.4GHz are used with small video screens at the pendant for improved operator control of the LHD. Figure 6: Example layout for modular video/control communications system for TeleRemote ELOS or TeleRemote LHD control systems.
- 14. TeleRemote Control - It Comes of Age Page - 14 Thomson Technology Ltd.- Proprietary Information A further level of capability, shown in Figure 6, can be used for either TeleRemote ELOS or TeleRemote LHD control. In this case, remote control is not dependent on the mine communications system, nor are mine-wide communications required. Instead, modular video/control substations are placed for sufficient coverage in the operational area. Control data, video, and vehicle status information are received/transmitted between the machine and the video/control substation. The substation then provides the link to the TeleRemote ELOS control pendant or TeleRemote LHD control station with coaxial or fibre optic cables. This approach offers incremental capability at reasonable cost covering TeleRemote LOS, ELOS, and LHD control applications as may be required by the particular mine layout and methods used. Moreover, existing mine communications infrastructure need not be replaced nor must it satisfy some minimal performance criteria. The TeleRemote communications system is local to the operational area and can be moved where needed as operations continue in the mine. Human Machine Interface Human machine interface requirements change significantly between TeleRemote LOS, ELOS, and LHD control applications. For TeleRemote LOS control, the operator can see the machine operations directly and does not rely on video or audio feedback through the radio. Many LOS pendants provide simple LEDs for warning indications. Some, including that shown in Figure 3, have small LED screens for operator messages and/or lighted keypads for indication of the state of specific subsystems (such as park brake). TeleRemote ELOS control is intended to provide the capability to operate at extended distances or beyond direct line-of-sight. Usually this requires video transmission from the machine with display capabilities at the pendant together with audio feedback from the machine. As more advanced capabilities are required, more health and performance information can be collected at the machine, as illustrated in the lower half of Figure 3, and transmitted to the operator workstation. In this case simple pendant interfaces may not be sufficient and the next level of human machine interface, such as those shown in Figure 6 or Figure 7, may be required. Figure 7 shows the TeleRemote LHD system developed under the PRECARN TRAM project. The LHD wiring harness was mostly removed and replaced with the VCAN distributed control and sensor system illustrated in Figure 5. Two of these VCAN nodes are also shown in Figure 7. For full TeleRemote LHD control, a modified Boler trailer is used for the control station and houses the telemetry subsystems and control station comput- ers. The trailer is towed by the LHD and stationed on the same level as the active stope. Figure 7 also includes a snapshot of the operator workstation inside the trailer. An ergonomic control chair provides the operator with two joysticks, gear shifter, and footpedals for LHD control. The control station software was adapted from the generic ANCAEUS (Eirich and Kramer, 1991) control system originally developed by the Defence Research Establishment Suffield for military applications. The control station display shows live video from the machine, a moving mine map of the operational level, and general windows for machine health and status displays. Audio and visual alarms are used to alert the operator to system faults with details available through the windowing system.
- 15. TeleRemote Control - It Comes of Age Page - 15 Thomson Technology Ltd.- Proprietary Information Figure 7: LHD system developed under the PRECARN TeleRemote Assisted Mining Project employs a full implementation of the VCAN system and ANCAEUS control station for TeleRemote LHD applications. Conclusions TeleRemote control systems have now reached a level of maturity that offers tremendous potential for mining automation. With the success, broad application, and acceptance of TeleRemote LOS control, many research and development initiatives have taken bold steps toward complete- or semi-autonomous control. The tech- nology and mine infrastructure investment required to support autonomous capability has resulted in limited acceptance of these systems at this time. Advanced levels of TeleRemote control, spanning line-of-sight, extended line-of-sight, and full load-haul-dump applications, offer affordable intermediate capabilities and flexible upgrade paths to future autonomous operational modes. Robust and proven implementations of these three levels of TeleRemote control are available with today’s technology.
- 16. TeleRemote Control - It Comes of Age Page - 16 Thomson Technology Ltd.- Proprietary Information References AITKEN, V.C., MACKAY, D.J., CHESNEY, R.H., THOMSON, D., NEUBERGER, D., Tele-remote assisted mining (TRAM) project: conceptual design and technology risk assessment; Defence Research Establishment Suffield, Ralston Alberta, Suffield Memorandum Nos. 1488 and 1489, 1996. BAIDEN, G.R. and HENDERSON, E., LHD teleoperation and guidance – proven productivity improvement tools; Canadian Institute of Mining and Metallurgy AGM, Toronto, Ontario, 1994. BAIDEN, G.R., Combining teleoperation with guidance for improving LHD productivity at Inco Limited; Pro- ceedings of the International Congress on Mine Design, Kingston, Ontario, 1993. BAIDEN, G.R., Future robotic mining at Inco Limited – the next 25 years; CIM Bulletin, pp. 36-38, 1996. BROPHEY, D.G., and EULER, D.W., The Opti-Trak system, a system for automating today’s LHD’s and trucks; Proceedings of the 2nd International Symposium on Mine Mechanization and Automation, Lulea, Sweden, 1993. CHADWICK, J., Mount Isa-Mining; Mining Magazine, July, 1992. EIRICH, R., KRAMER, A., A generic semi-autonomous ground vehicle control system; Proceedings of the 3rd Conference on Military Robotic Applications, Medicine Hat, Alberta, Canada, Sept. 9-12, pp. 68- 73, 1991. ERIKSSON, G. and KITOK, A., Automatic loading and dumping using vehicle guidance in a Swedish mine; Proceedings of the 1st International Symposium on Mine Mechanization and Automation, Vol. 2, Golden, Colorado, 1991. GRENIER, A., CHEVRETTE, G., and COACHE, C., Noranda automatic guidance system architecture over- view; Proceedings of the 6th Canadian Symposium on Mining Automation, Montreal, Quebec, 1994. LANE, J.D. and KING, R.H., Automatic steering of an articulated haul truck for underground mining; Informa- tion Circular 9407, U.S. Bureau of Mines, 1994. NEUBURGER, D., AITKEN, V., TeleRemote Assisted Mining Project; Proposal Submission to PRECARN Associates, Ont., PRECARN PERK Program, Dec. 1995. ST-AMANT, M., PICHE, A., HURTEAU, R., CHEVRETTE, G. and SAURIOL, G., A proposed optical guideline for mine vehicle automation; Proceedings of the 4th Canadian Symposium on Mining Automation, Saskatoon, Saskatchewan, 1990. STEELE, J.P.H., KING, R. and STRICKLAND, W., Modelling and sensor-based control of an autonomous mining machine; Proceedings of the 1st International Symposium on Mine Mechanization and Automa- tion, Vol. 1, Golden, Colorado, 1991. VAGENAS, N., SCOBLE, M., and BAIDEN, G, Mobile machine automation in underground metal mining: the first 25 years; Mineral Resources Engineering, Vol. 5, No. 1, pp. 43-55, 1996. VAGENAS, N., SJOBERG, H., and WIKSTROM, S., Application of remote-controlled/automatic load-haul- dump system in Zinkgruvan, Sweden; Proceedings of the 1st International Symposium on Mine Mechanization and Automation, Vol. 2, Golden, Colorado, 1991.
- 17. TeleRemote Control - It Comes of Age Page - 17 Thomson Technology Ltd.- Proprietary Information