More Related Content

PDF

PDF

PDF

PDF

PPTX

PDF

PPTX
DPC Webinar ISV Special Interest Series: Marketing and Building a Presence Th... 
PPTX
Project of UAV(06JUN2012) Viewers also liked

PPTX
Java script初心者のためのnode.jsで学ぶドローン制御プログラミング 
PDF
災害監視無人機システムと 災害監視無人機システムとFOSS4Gとの関わり ((独)宇宙航空研究開発機構 都甲 様) 
PPT

PPTX

PDF

PDF
DronekitによるAndroid APIの概要 
PPTX
建設業界におけるUAVの利活用 ( 20160819 hokkaido kankyo_hozen_seminer ) 
PPTX
Rsj2015 presentation - Collaboration research for monitoring Tsushima Wildcats 
PPTX

PDF

PDF

PPTX
ドローン用フライトコントローラ「Dronecode」の概要( #KOF2015 ) 
PDF
北部九州における産学連携による小型電気飛行機の開発 
PPTX

PDF

PDF
ドローン + IT 〜エンジニアはフィールドに出よう〜 
PDF
DRONEKIT CLOUDを使ったWEBサービス開発 
PDF

PDF

PDF
UAV近接リモートセンシングによる水稲の群落表面温度の観測 More from Komei Sugiura

PDF
SuMo-SS: Submodular Optimization Sensor Scattering for Deploying Sensor Netwo... 
PDF
生活支援ロボットにおける�大規模データ収集に向けて 
PDF
階層型評価構造に基づく観光スポット推薦システムの構築と長期実証実験 
PDF

PDF

PDF
New challenge in RoboCup 2017 Nagoya: RoboCup@Home Standard Platform 
PDF
Cloud Robotics for Human-Robot Dialogues 
PDF
20150531Deep Recurrent Neural Networkによる環境モニタリングデータの予測 
PDF

PDF
Japan Robot Week 2014けいはんなロボットフォーラム 
PDF
ロボットの音声コミュニケーション技術:言葉や能力の壁を越えるデータ指向知能に向けて 
PDF

PDF

PDF
20151129インテリジェントホームロボティクス研究会 
PDF
20140513大規模異分野データ横断検索における時空間情報を用いた擬似適合性フィードバック 
PDF

PDF
rospeex: a cloud-based speech communication toolkit for ROS 
PDF
Spatio-Temporal Pseudo Relevance Feedback for Large-Scale and Heterogeneous S... 
PDF
Language acquisition framework for robots: From grounded language acquisition... 
PDF
20160221statistic imitation learning and human-robot communication Recently uploaded

PDF
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと... 
PDF
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup 
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2 
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1 
PPTX
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool 
PDF
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ 20160606劣モジュラ性を利用したドローンによるばらまき型センサ配置
- 1.
- 2.
- 3.
関連研究
分類 例
センサ配置一般 [Hart10など]センサネットワーク、ロボティクス、
環境モニタリングの分野で多数
ドローンによる
センサ配置
[Abdulaal, ICUAS13]洪水発見のためのセンサばらま
き。⇔投下計画は扱っていない
劣モジュラ最適化
によるセンサ配置
[Krause 08] 相互情報量最大化によるセンサ配置。
⇔位置誤差がないという前提なので、大きい誤差が
あるとランダム配置と変わらない性能になる
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
宣伝
• Advanced Robotics特集号「MachineLearning and Data Engineering
in Robotics」が出ました
– 本分野の代表文献がまとまって読めます
• ロボット学会OS「確率ロボティクスとデータ工学ロボティクス」
– 7/13締め切り
• CREST「記号創発ロボティクスによる人間機械コラボレーション基
盤」ポスドク/技術員募集
– 2017/4~
– マルチモーダル音声対話、実世界の言語化、生活支援ロボット、
クラウドロボティクス



![関連研究
分類 例
センサ配置一般 [Hart 10など]センサネットワーク、ロボティクス、
環境モニタリングの分野で多数
ドローンによる
センサ配置
[Abdulaal, ICUAS13]洪水発見のためのセンサばらま
き。⇔投下計画は扱っていない
劣モジュラ最適化
によるセンサ配置
[Krause 08] 相互情報量最大化によるセンサ配置。
⇔位置誤差がないという前提なので、大きい誤差が
あるとランダム配置と変わらない性能になる](https://image.slidesharecdn.com/20160606jsaiconfv4-160606044225/75/20160606-3-2048.jpg)

![Q: greedy手法が逐次投下と相性が良いからといってそれでよいのか?
A: 1-1/e近似が保証されている
• 査読者的疑問
– 「センサが多くなったらどうするのか?」(最適値の探索は組
み合わせ爆発を起こすのでは)
– 「逐次的な配置は必ずしも最適配置にならないのでは?」(1
個投下したら取り消せない)
• 劣モジュラ性の利用
– 特定の条件下で相互情報量は劣モジュラ性を持つ
– greedy手法が1-1/e近似になる
最適値の63%が保証されて
いる。実用上は90%程度の
報告も[河原+15]
組み合わせ爆発
を起こさない
X,Y ⊆ V , X ⊆ Y](https://image.slidesharecdn.com/20160606jsaiconfv4-160606044225/75/20160606-5-2048.jpg)
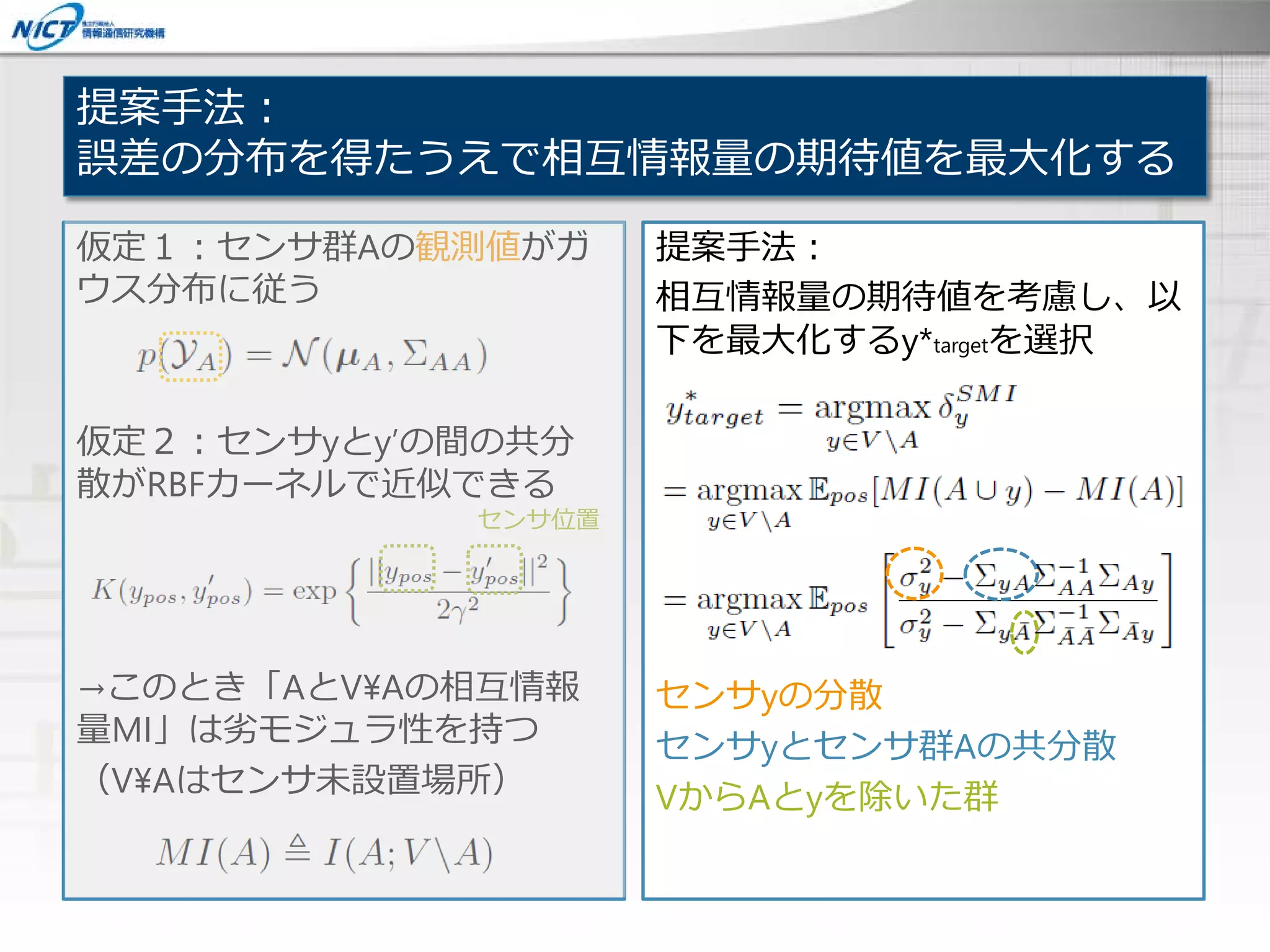
![センサ観測モデルとしてガウス過程を利用[Krause 08]
仮定1:センサ群Aの観測値がガ
ウス分布に従う
仮定2:センサyとy’の間の共分
散がRBFカーネルで近似できる
→このとき「AとV¥Aの相互情報
量MI」は劣モジュラ性を持つ
(V¥Aはセンサ未設置場所)
センサ位置
センサ未設置場所に対する相互情報
量を大きくしたい
各センサの観測値は、ガウス分布に
従う
センサ観測値の共分散が距離のみに
依存する(実応用では推定すべき)
A
A
A
AA
A
V](https://image.slidesharecdn.com/20160606jsaiconfv4-160606044225/75/20160606-6-2048.jpg)
![位置誤差のモデル化
今回の設定では移動量と方向に依存することがわかった
位置誤差
1. [Engel+ 14]による位置推定誤差
→移動量 dと方向 x, yに依存
2. 落下による散らばり
→センサ形状/材質に依存
T Target D Drone
※環境と投下する高さは一定
位置誤差をガウス分布で近似
• 分散=方向(αxとαy)と移動量
dに依存。βはオフセット](https://image.slidesharecdn.com/20160606jsaiconfv4-160606044225/75/20160606-8-2048.jpg)
![実験設定:
再現性確保の面から実験を主にシミュレーション上で行う
• 実機モデル
– ハードウェア:AR.Drone 2.0を基に電磁石によるセンサ着脱機構
を取付(ハードウェア寿命は数十時間程度と想定)
– 位置推定:単眼カメラによる位置推定[Klein+07][Engel+ 14]
– 環境:8m x 12mの屋内環境
• シミュレーションモデル
– 再現性確保の面で実機実験より有利](https://image.slidesharecdn.com/20160606jsaiconfv4-160606044225/75/20160606-9-2048.jpg)

![代表条件における定量的結果:
提案手法は、ベースライン/ランダム手法より優れる
提案手法(青)は既存手法
(緑)およびランダム投下
(オレンジ)より良い
センサ数
実験設定
・25候補点に12個のセンサを設置
・シミュレーション実験
比較対象
・ベースライン[Krause 08]
・ランダム投下
評価尺度
(累積)相互情報量
位置誤差パラメータ
(αx, αy)=(0.3, 0.2)
*10回平均の結果
相互情報量](https://image.slidesharecdn.com/20160606jsaiconfv4-160606044225/75/20160606-11-2048.jpg)
![実験設定
• シミュレーション実験
目的
• 様々な位置誤差の環境に対す
る提案手法の有効性を検証
比較対象
• ベースライン[Krause 08]
尺度
• 累積相互情報量の差
– 青:ベースラインが優れる
– 赤:提案手法が優れる
感度解析: 誤差が小さければ提案手法はベースラインと
同等で、誤差が大きいと提案手法が優れる
パラメータの組121通りに対し、
10回ずつの平均
x方向の誤差:αx
y方向の誤差:αy
誤差が小さいので
同等(差が0)
それ以外の領域では
提案手法が優れる](https://image.slidesharecdn.com/20160606jsaiconfv4-160606044225/75/20160606-12-2048.jpg)