![Position in Cloud Robotics
• Cloud robotics [James Kuffner@Google, 2011]
– Manipulation using Google Goggles [Kehoe+ 2013]
– Knowledge sharing based on RoboEarth [Tenorth+ 2012]
– Speech communication for robots
rospeex
Cloud-based
Incompatible
Commercial systems
(Nuance, ToSpeak,
AmiVoice Cloud, ..)
rospeex
Many
OpenHRI, HARK,
PocketSphinx, Festival
Stand-alone
Robot middleware
compatible](https://image.slidesharecdn.com/20131213rospeex-131213044738-phpapp02/85/rospeex-a-cloud-based-speech-communication-toolkit-for-ROS-4-320.jpg)
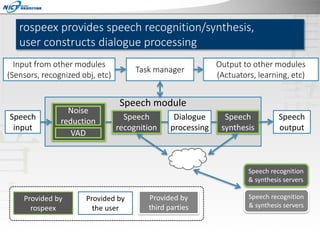
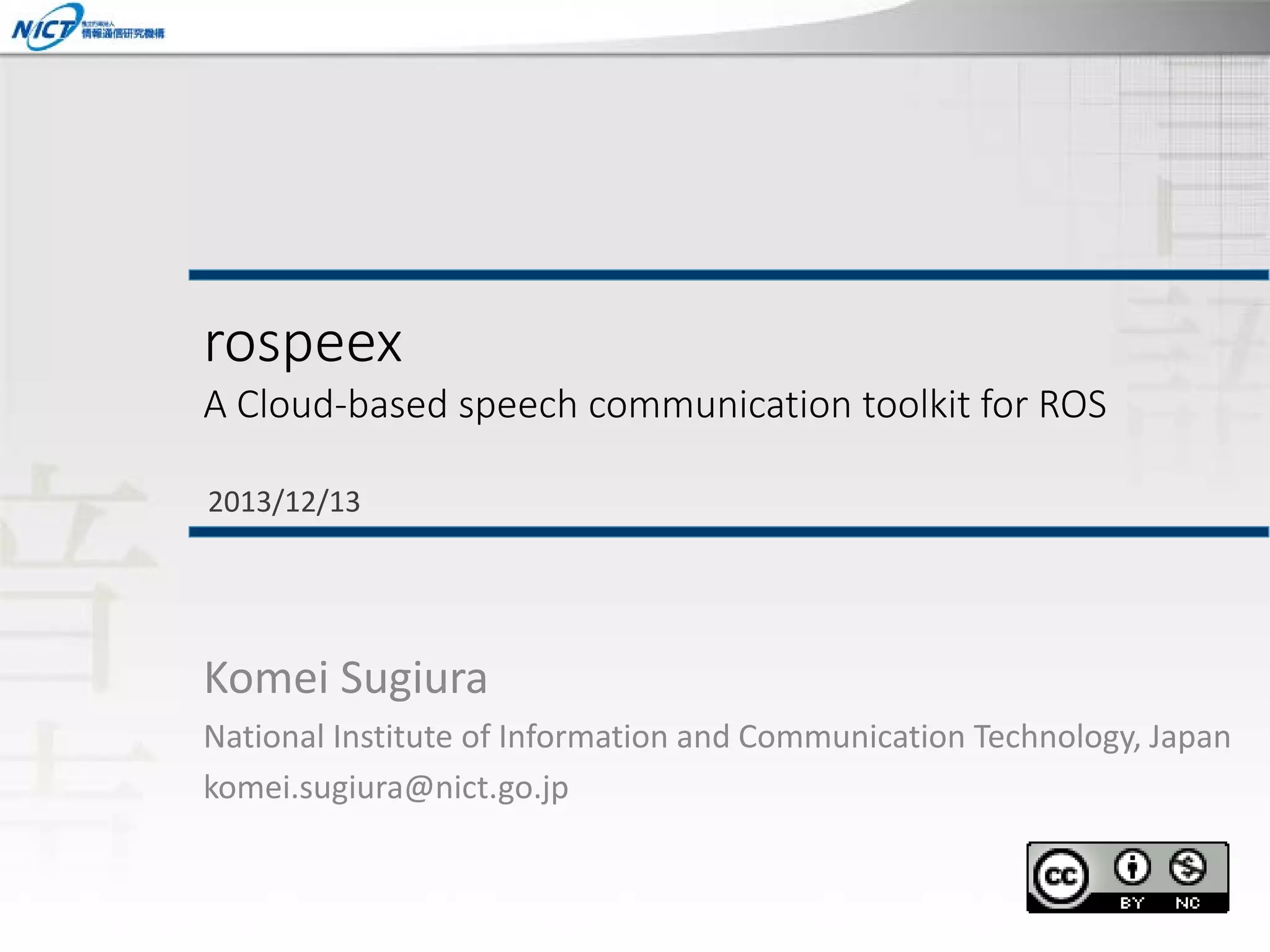
![Using speech recognition/synthesis without ROS
• Send JSON file to the server
– Recognition http://rospeex.ucri.jgn-x.jp/nauth_json/jsServices/VoiceTraSS
– Synthesis
http://rospeex.ucri.jgn-x.jp/nauth_json/jsServices/VoiceTraSR
• Sample codes (JavaScript, Python, C++) are available
Non-monologue speech synthesis
{ "method":"recognize",
"params":[
"ja",
{“audio”:“base64-encoded wav",
"audioType":"audio/x-wav",
"voiceType":"*"
}]}
Recognition
Search
{ “method” : “speak”,
"params" : [
"ja",
"こんにちは",
"*",
"audio/x-wav"
]}
Synthesis](https://image.slidesharecdn.com/20131213rospeex-131213044738-phpapp02/85/rospeex-a-cloud-based-speech-communication-toolkit-for-ROS-9-320.jpg)

- rospeex is a cloud-based speech communication toolkit that is compatible with ROS, the Robot Operating System. It provides speech recognition using the VoiceTra engine and other functionalities like noise reduction and non-monologue speech synthesis. - rospeex is positioned in cloud robotics as it is cloud-based, incompatible with commercial systems but compatible with robot middleware, and supports multiple languages for speech recognition and synthesis unlike conventional packages. - rospeex allows for quadrilingual communication and provides speech recognition and synthesis services while the user constructs their own dialogue processing for the application.




































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)















