Desplazamientos trabajo virtual 1
•Download as PPTX, PDF•
0 likes•203 views

Se presentan problemas resueltos donde se calculan desplazamentos en estructuras estáticamente determinadas aplicando el método del trabajo virtual

Recommended
More Related Content
What's hot
What's hot (20)
Similar to Desplazamientos trabajo virtual 1
Similar to Desplazamientos trabajo virtual 1 (20)
More from José Grimán Morales
More from José Grimán Morales (20)
Recently uploaded
Recently uploaded (20)
Desplazamientos trabajo virtual 1
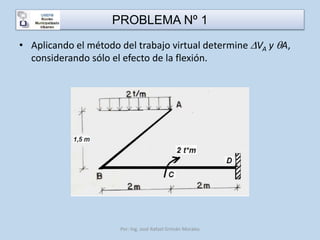
- 1. PROBLEMA Nº 1 • Aplicando el método del trabajo virtual determine VA y A, considerando sólo el efecto de la flexión. Por: Ing. José Rafael Grimán Morales
- 2. PROBLEMA Nº 1 • 1ro. Se analiza la estabilidad y determinación de la estructura. • Descripción de la estructura: Es una estructura plana conformada dos elementos unidos en B por medio de una junta rígida. Esto hace que se comporte como un solo cuerpo que requiere sólo de tres reacciones, no concurrentes y no paralelas para que sea estable y estáticamente determinada. • El apoyo en D es un empotramiento que proporciona tres reacciones: r = 3. El número de ecuaciones de equilibrio en el plano es e = 3 y no existe inestabilidad geométrica externa, como r = e = 3 se concluye que la estructura es estable y estáticamente determinada. Por: Ing. José Rafael Grimán Morales
- 3. PROBLEMA Nº 1 • 2do. Se determinan las reacciones en la estructura real. • Se reconocen los tipos de apoyos. Se dibuja el diagrama de cuerpo libre. Se sustituyen los apoyos por la reacción correspondiente. • 𝑀𝐷 = 0; 3 ∙ 4 − 2 − 𝑀𝐷 = 0 • 𝑀𝐷 = 10 𝑡 ∙ 𝑚 • 𝐹𝑥 = 0; 𝐷𝑥 = 0 • 𝐹𝑦 = 0; 𝐷𝑦 − 4 = 0 • 𝐷𝑦 = 4 𝑡 Por: Ing. José Rafael Grimán Morales
- 4. PROBLEMA Nº 1 • 3ro. Se determinan las ecuaciones de momento flector para la estructura real, en términos de una variable s, para cada segmento de la estructura. • Tramo DC, 0 s1 2 • M1 + 10 – (s1)*4 = 0; M1 = 4*s1 – 10 (1) • Tramo CB, 0 s2 2 • M2 + 2 + 10 – (s2 + 2)*4 = 0; • M2 = 4*s2 – 4 (2) Por: Ing. José Rafael Grimán Morales
- 5. PROBLEMA Nº 1 • Tramo AB, 0 s3 2,5 m • M3 + (x3 / 2)*2*x3 ; M3 = −𝑥3 2 (3) • Pero x3 = 𝑠3 ∙ 4 5 , Dado que 4/5 es el coseno del ángulo entre la carga distribuida y el segmento de viga inclinada. Sustituyendo en (3). • M3 = − 16 25 ∙ 𝑠3 2 (4) Por: Ing. José Rafael Grimán Morales
- 6. PROBLEMA Nº 1 • 4to. Se determinan las reacciones en sistema virtual y se determinan las ecuaciones de momento flector para cada segmento. • Se reconocen los tipos de apoyos. Se dibuja el diagrama de cuerpo libre. Se sustituyen los apoyos por la reacción correspondiente. • 𝑚𝐷 = 0; 2 ∙ 1 − 𝑚𝐷 = 0 • 𝑚𝐷 = 2 𝑡 ∙ 𝑚 • 𝐹𝑥 = 0; 𝐷𝑥 = 0 • 𝐹𝑦 = 0; 𝑑𝑦 − 1 = 0 • 𝑑𝑦 = 1 𝑡 Por: Ing. José Rafael Grimán Morales
- 7. PROBLEMA Nº 1 • Se determinan las ecuaciones de momento flector para la estructura virtual, en términos de una variable s, para cada segmento de la estructura. • Tramo DC, 0 s1 2 • m1 + 2 – (s1)*1 = 0; M1 = s1 – 2 (5) • Tramo CB, 0 s2 2 • m2 + 2 – (s2 + 2)*1 = 0; • m2 = s2 (6) • Tramo AB, 0 s3 2,5 m • m3 + (x3 )*1 ; m3 = −𝑥3 (7) • Pero x3 = 𝑠3 ∙ 4 5 , • m3 = − 4 5 𝑠3 (8) Por: Ing. José Rafael Grimán Morales
- 8. PROBLEMA Nº 1 • 5to. Aplicamos la fórmula de cálculo de desplazamientos por efectos de la flexión a cada segmento y se hace la suma algebraica de los términos obtenidos. • 1 ∙ ∆𝑉𝐴 = 0 𝐿 𝑚 𝑀 𝑑𝑠 𝐸𝐼 • 1 ∙ ∆𝑉𝐴 = 0 2 𝑠 − 2 4𝑠−10 𝑑𝑠 𝐸𝐼 + 0 2 𝑠 4𝑠−4 𝑑𝑠 𝐸𝐼 + 0 2,5 − 4 5 𝑠 − 16 25 𝑠2 𝑑𝑠 𝐸𝐼 • ∆𝑉𝐴 = 0 2 4𝑠2 −18 𝑠+20 𝑑𝑠 𝐸𝐼 + 0 2 4 𝑠2 −4𝑠 𝑑𝑠 𝐸𝐼 + 0 2,5 64 125 𝑠3 𝑑𝑠 𝐸𝐼 Por: Ing. José Rafael Grimán Morales
- 9. PROBLEMA Nº 1 • Cálculo de la rotación en A, A • Se determinan las reacciones en sistema virtual y se determinan las ecuaciones de momento flector para cada segmento. • Se reconocen los tipos de apoyos. Se dibuja el diagrama de cuerpo libre. Se sustituyen los apoyos por la reacción correspondiente. • 𝑚𝐷 = 0; 1 − 𝑚𝐷 = 0 • 𝑚𝐷 = 1 𝑡 ∙ 𝑚 • 𝐹𝑥 = 0; 𝑑𝑥 = 0 • 𝐹𝑦 = 0; 𝑑𝑦 = 0 Por: Ing. José Rafael Grimán Morales
- 10. PROBLEMA Nº 1 • Se determinan las ecuaciones de momento flector para la estructura virtual, en términos de una variable s, para cada segmento de la estructura. • Tramo DC, 0 s1 2 • m1 - 1; m1 = 1 (9) • Tramo CB, 0 s2 2 • m2 - 1 = 0; • m2 = 1 (10) • Tramo AB, 0 s3 2,5 m • m3 + 1 ; m3 = −1 (11) Por: Ing. José Rafael Grimán Morales
- 11. PROBLEMA Nº 1 • 5to. Aplicamos la fórmula de cálculo de desplazamientos por efectos dela flexión a cada segmento y se hace la suma algebraica de los términos obtenidos. • 1 ∙ ∆𝜃𝐴 = 0 𝐿 𝑚 𝑀 𝑑𝑠 𝐸𝐼 • 1 ∙ ∆𝜃𝐴 = 0 2 1 4𝑠−10 𝑑𝑠 𝐸𝐼 + 0 2 1 4𝑠−4 𝑑𝑠 𝐸𝐼 + 0 2,5 −1 − 16 25 𝑠2 𝑑𝑠 𝐸𝐼 • ∆𝜃𝐴 = 0 2 4𝑠−10 𝑑𝑠 𝐸𝐼 + 0 2 4𝑠−4 𝑑𝑠 𝐸𝐼 + 0 2,5 16 25 𝑠2 𝑑𝑠 𝐸𝐼 • Lo que indica que rota en sentido antihorario, es decir, en sentido opuesto a como se supuso el sentido del momento unitario. Por: Ing. José Rafael Grimán Morales