1. РЕСПУБЛИКА КАЗАХСТАН
(19) KZ (13) B (11) 28513
(51) F04D 29/051 (2006.01)
F04D 27/00 (2006.01)
КОМИТЕТ ПО ПРАВАМ
ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ
МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К ПАТЕНТУ
(21) 2012/1583.1
(22) 16.12.2010
(45) 15.05.2014, бюл. №5
(31) CO2009A000072
(32) 22.12.2009
(33) IT
(85) 22.06.2012
(86) PCT/EP2010/070001, 16.12.2010
(72) МАРИОТТИ, Габриэле (IT); КАНЬАРИНИ,
Клаудия (IT)
(73) НУОВО ПИНЬОНЕ С.П.А. (IT)
(74) Тагбергенова Модангуль Маруповна;
Тагбергенова Алма Таишевна; Касабекова Найля
Ертисовна
(56) EP 0550801 A2, 14.07.1993
WO 0116466 A1, 08.03.2001
FR 2592688 A1, 10.07.1987
(54) ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА
ОСЕВОГО УСИЛИЯ ДЛЯ ЦЕНТРОБЕЖНЫХ
КОМПРЕССОРОВ
(57) Описаны система и способ динамической
балансировки осевых нагрузок в центробежных
компрессорах (10) для снижения остаточных осевых
нагрузок на подшипники (20). Датчик или зонд (42)
измеряет параметр, связанный с осевой нагрузкой,
воздействующей на подшипник (20). На основе
измеренного параметра управляют давлением в
балансировочной камере (34) для регулировки
компенсирующей осевой силы, формируемой
балансировочным барабаном (28).
(19)KZ(13)B(11)28513
2. 28513
2
Настоящее изобретение относится, в общем, к
центробежным компрессорам и, в частности, к
балансировке осевого усилия в упомянутых
компрессорах.
Предпосылки создания изобретения
Компрессором называют установку, которая
повышает давление сжимаемой текучей среды, к
примеру, газа, посредством использования
механической энергии. Компрессоры используют во
множестве различных применений, включая их
эксплуатацию в качестве первой ступени
газотурбинного двигателя. Газотурбинные
двигатели, в свою очередь, также применяют во
множестве производственных процессов, включая
производство электроэнергии, сжижение
природного газа и другие процессы. Среди
различных типов компрессоров, применяемых в
упомянутых процессах и на производственных
предприятиях, используют, так называемые,
центробежные компрессоры, в которых
механическая энергия воздействует на газ,
входящий в компрессор путем центробежного
ускорения, ускоряющего частицы газа, например,
путем вращения центробежной крыльчатки или
ротора, через который проходит упомянутый газ.
Центробежные компрессоры могут оснащаться
одним ротором, так называемая одноступенчатая
конфигурация, или множеством роторов,
расположенных последовательно, в таком случае их
часто называют многоступенчатыми
компрессорами. Каждая ступень центробежного
компрессора, как правило, включает впускной
патрубок для сжимаемого газа, ротор, который
способен передавать кинетическую энергию
входному газу и выходную трубу, которая
преобразует кинетическую энергию газа,
выходящего из ротора, в энергию давления.
Многоступенчатые центробежные компрессоры
испытывают осевое усилие, воздействующее на
ротор, которое вызвано разностью давлений в
различных ступенях компрессора, и перепадом
момента газа, изменяющего свою направление с
горизонтального на вертикальное. Упомянутое
осевое усилие обычно компенсируется
балансировочным поршнем и подшипником,
способным выдерживать осевое усилие. Поскольку
упомянутый подшипник, испытывающий осевое
усилие, не может выдержать нагрузку полного
осевого усилия ротора, то для компенсации большей
части осевого усилия предназначен
балансировочный поршень, при этом подшипник
должен выдерживать остаточное, или избыточное,
осевое усилие. Балансировочный поршень
реализуют, как правило, в виде вращающегося диска
или барабана, который одевают на вал компрессора
таким образом, что каждая сторона
балансировочного диска или барабана испытывает
при работе различное давление. Диаметр
балансировочного поршня выбирают для получения
требуемой осевой нагрузки, чтобы исключить
перегрузку осевого подшипника остаточной
нагрузкой. Традиционные подшипники с масляной
смазкой, как правило, проектируются таким
образом, чтобы выдерживать осевые силы,
четырехкратно превышающие максимальное
остаточное осевое усилие, которое
предположительно может возникнуть при
нештатных условиях, например, нагрузка, имеющая
импульсный характер.
Однако, вследствие изменений состояния газа
при работе в компрессоре, компенсации,
обеспечиваемой балансировочным поршнем, может
быть недостаточно для исключения перегрузки
подшипника. Действительно, некоторые типы
центробежных компрессоров чаще других
подвержены упомянутым изменениям состояния
газа, например, в задачах с хранением газа для
многоступенчатых центробежных компрессоров с
параллельной работой, в которых разность осевых
усилий между первой и второй секцией
компрессора, связанная с разностью коэффициентов
потока, не может быть непосредственно
компенсирована балансировочным поршнем.
Соответственно, традиционные подшипники с
масляной смазкой, как правило, проектируются
таким образом, чтобы выдерживать осевые силы,
четырехкратно превышающие максимальное
остаточное осевое усилие, которое
предположительно может возникнуть при
нештатных условиях, например, при нагрузке,
имеющей импульсный характер.
Другая, недавняя, разработка включает замену
традиционных подшипников с масляной смазкой на
активные магнитные подшипники (active magnetic
bearings, АМВ) в качестве осевой (и радиальной)
вращающейся опоры для вала компрессора.
Подшипники АМВ работают на основе
электромагнитного принципа для управления
осевым и радиальным смещением внутри
компрессора. Кратко, АМВ включают
электромагнит, управляемый усилителем мощности,
который регулирует напряжение (и, следовательно,
ток) в витках обмотки электромагнита в
зависимости от сигнала обратной связи, который
отражает смещение ротора компрессора в
устройстве. АМВ обладают преимуществом,
заключающимся в том, что они не требуют
масляной смазки, а это упрощает общее техническое
обслуживание компрессорной системы и
потенциально устраняет необходимость
обеспечения уплотнения между крыльчатками и
подшипником. Однако АМВ имеют также
недостаток, заключающийся в том, что они не могут
выдерживать столь же высокое осевое усилие, как
традиционные подшипники с масляной смазкой.
Таким образом, необходимо разработать и
предложить способы и системы для динамической
балансировки осевого усилия в описанных выше
компрессорах, которые позволят преодолеть
упомянутые недостатки существующих систем
балансировки.
Сущность изобретения
Примеры осуществления настоящего
изобретения относятся к системам и способам
динамической балансировки осевых нагрузок в
центробежных компрессорах для снижения
3. 28513
3
остаточных осевых нагрузок на применяемые в них
подшипники. Датчик или зонд измеряет параметр,
связанный с осевой нагрузкой, воздействующей на
подшипник. На основе измеренного параметра,
управляют давлением в балансировочной камере для
регулировки компенсирующей осевой силы,
формируемой балансировочным барабаном.
Преимущества, в соответствии с примерами
осуществления настоящего изобретения,
описанными в настоящем документе, включают,
например, уменьшение остаточных осевых сил,
воздействующих на подшипники в различных
рабочих условиях. Однако специалистам в
настоящей области техники следует понимать, что
упомянутые преимущества не должны считаться
ограничением настоящего изобретения, если они
явно не описаны в одном или более пунктах
приложенной формулы изобретения.
В соответствии с одним из примеров
осуществления настоящего изобретения
центробежный компрессор включает узел ротора,
включающий по меньшей мере одну крыльчатку,
подшипник, связанный с упомянутым узлом ротора
и предназначенный для его удержания с
возможностью вращения, статор, балансировочный
барабан, размещенный между упомянутой по
меньшей мере одной крыльчаткой и упомянутым
подшипником, балансировочную камеру, заданную
по меньшей мере частично внешней стороной
упомянутого балансировочного барабана, и
имеющую соединенную с ней балансировочную
линию, датчик для измерения параметра, который
связан с осевой нагрузкой на упомянутый
подшипник и управляющий клапан для изменения
давления в упомянутой камере на основе
упомянутого измеренного параметра.
В соответствии с еще одним примером
осуществления настоящего изобретения способ
динамической балансировки осевой нагрузки,
воздействующей на подшипник в центробежном
компрессоре, включает следующие шаги: измерение
параметра, связанного с осевой нагрузкой, и
управление давлением в балансировочной камере,
находящейся вблизи балансировочного барабана в
центробежном компрессоре, на основе упомянутого
измеренного параметра, для динамической
балансировки осевой нагрузки, воздействующей на
упомянутый подшипник.
Краткое описание чертежей
Приложенные чертежи иллюстрируют примеры
осуществления настоящего изобретения, причем:
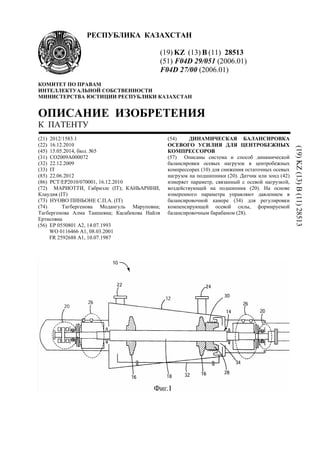
на фиг.1 представлено схематическое
изображение центробежного компрессора
многоступенчатого типа, который может быть
оснащен механизмами динамической балансировки
в соответствии с примерами осуществления
настоящего изобретения;
на фиг.2 продемонстрирована статическая
балансировка осевой нагрузки в центробежном
компрессоре;
на фиг.3 продемонстрирована динамическая
балансировка осевой нагрузки в центробежном
компрессоре в соответствии с одним из примеров
осуществления настоящего изобретения; и
на фиг.4 представлена блок-схема алгоритма,
иллюстрирующая способ динамической
балансировки нагрузки в соответствии с одним из
примеров осуществления настоящего изобретения.
Подробное описание изобретения
Дальнейшее подробное описание примеров
осуществления настоящего изобретения ссылается
на приложенные чертежи. Одни и те же числовые
позиции на различных чертежах обозначают одни и
те же или аналогичные элементы. При этом
дальнейшее подробное описание не ограничивает
настоящее изобретение. Напротив, объем
настоящего изобретения определяется приложенной
формулой изобретения.
Для представления контекста последующего
описания, касающегося систем балансировки усилия
в соответствии с упомянутыми примерами
осуществления настоящего изобретения, на фиг. 1
схематически проиллюстрирован многоступенчатый
центробежный компрессор 10, в котором подобные
системы балансировки осевого усилия могут
применяться. Компрессор 10 включает корпус или
станину (статор) 12, в котором установлен
вращающийся вал 14 компрессора, снабженный
множеством центробежных крыльчаток 16. Узел 18
ротора включает вал 14 и крыльчатки 16, при этом
он удерживается в радиальном и осевом
направлениях посредством подшипников 20,
которые размещены с каждой стороны узла 18
ротора.
Многоступенчатый центробежный компрессор
работает для забора входного технологического газа
из входного канала 22, для повышения давления
технологического газа посредством работы узла 18
ротора, и для последующего выброса
технологического газа через выходной канал 24 с
выходным давлением, превышающим входное
давление. Технологический газ может представлять
собой, например, любой из следующего: углекислый
газ, сероводород, бутан, метан, этан, пропан,
сжиженный природный газ или их комбинацию.
Между роторами 16 и подшипниками 20 для
предотвращения попадания технологического газа в
подшипники 20 обеспечивают системы 26
уплотнения. Корпус 12 выполнен с возможностью
закрытия и подшипников 20, и системы 26
уплотнения для предотвращения утечки газа из
центробежного компрессора 10. В соответствии с
различными примерами осуществления настоящего
изобретения подшипники 20 могут быть
реализованы или как подшипники с масляной
смазкой, или как активные магнитные подшипники.
Если в качестве подшипников 20 применяют
активные магнитные подшипники, то механизмы 26
уплотнения могут быть опущены.
Центробежный компрессор 10 включает также
описанный выше балансировочный поршень
(барабан) 28, вместе с соответствующим
лабиринтным уплотнением 30. Балансировочная
линия 32 поддерживает давление в балансировочной
камере 34 на внешней стороне балансировочного
4. 28513
4
барабана равным (или практически равным)
давлению, с которым технологический газ входит
через входной канал 22. Однако в соответствии с
различными примерами осуществления настоящего
изобретения, описанными ниже, упомянутая
балансировочная линия 32 включает управляющий
клапан, который может модулировать давление в
балансировочной камере 34 на основе, например,
измеренной осевой нагрузки на подшипник 20, или
вблизи него, в соответствии с дальнейшим более
подробным описанием относительно фиг. 3.
Сначала, однако, представляется полезным
привести описание взаимодействия различных
элементов, показанных на фиг.1, и их общей связи с
осевой нагрузкой путем рассмотрения фиг.2. На
фиг.2 принципиально проиллюстрированы
различные силы осевой нагрузки, связанные с
работой центробежного компрессора 10. В
соответствии с изображением фиг.2 крыльчатки 16
прикладывают осевую нагрузку (силу) на
подшипники 20 в направлении внутренней стороны
(с малым давлением) компрессора 10, вследствие,
например, различий между ступенями, изменения
момента газа и т.п. Несмотря на его отсутствие на
фиг.2 двигатель, вращающий вал 18 компрессора,
будет прикладывать (практически постоянную)
осевую нагрузку в противоположном направлении,
то есть в направлении внешней стороны (с высоким
давлением) центробежного компрессора 10. Для
компенсации остаточной осевой нагрузки от
крыльчаток 16 в системе спроектирован
балансировочный барабан 28 для приложения
осевой силы, в направлении внешней стороны,
причем величина упомянутой силы основана на
разности прогнозируемой осевой нагрузки от
крыльчаток и мотора. Это осуществляют, например,
путем проектирования системы таким образом,
чтобы давление Рu технологического газа с
внутренней стороны балансировочного барабана 28
было выше, чем давление Ре на внешней стороне
балансировочного барабана 28, а также путем
выбора балансировочного барабана
соответствующего размера (диаметра) для
формирования необходимой балансировочной силы.
Упомянутая разность давлений создается и
поддерживается путем обеспечения
балансировочной линии 32 между балансировочной
камерой 34 и основной линией всасывания,
связанной со входным каналом 22, таким образом,
чтобы давление в балансировочной камере было
практически равным давлению на внутренней
стороне крыльчаток 16.
В идеале, компенсация осевого усилия,
обеспечиваемая балансировочным барабаном 28,
обеспечит существенную компенсацию осевой
нагрузки, прикладываемой к подшипникам 20 от
крыльчаток 16, или по меньшей мере компенсирует
достаточную величину осевой нагрузки для того,
чтобы остаточная нагрузка лежала в пределах
проектных технических характеристик
подшипников 20. Однако в соответствии с
предшествующим описанием отклонения
параметров при работе подобных компрессоров
и/или использование в качестве подшипников 20
АМВ может привести к тому, что остаточная
нагрузка превысит проектные допуски на осевую
нагрузку подшипников 20. Например, в следующей
таблице 1, проиллюстрированы результаты
испытания осевой нагрузки для примера
центробежного компрессора 10 с шестью
крыльчатками и балансировочным барабаном 28,
имеющим диаметр, равный 231 мм, и вращающимся
со скоростью 17000 об/мин. Данный испытательный
компрессор был оснащен подшипниками АМВ в
качестве подшипников 20, с номинальной проектной
осевой нагрузкой около +/- 9000 Н.
Таблица 1
Скорость
потока, %
Осевая нагрузка
двигателя, [Н]
Осевая нагрузка
ступеней, [Н]
Осевая нагрузка
барабана, [Н]
Остаточная
нагрузка, [Н]
141 11055 -74644 49557 -14032
140 11055 -76773 51973 -13745
130 11055 -103554 82378 -10121
120 11055 -122331 104646 -6630
110 11055 -137399 123401 -2943
100 11055 -149200 138755 609
90 11055 -157029 150214 4241
80 11055 -161512 157971 7514
73 11055 -162875 161356 9536
Из таблицы 1 можно видеть, что для
коэффициентов потока в 73%, 130%, 140% и 141%
от номинальной проектной скорости потока
остаточная осевая нагрузка, то есть осевая нагрузка,
приходящаяся на подшипники АМВ 20
центробежного компрессора, превосходит
показатели +/-9000 Н, для подшипников,
использованных в конфигурации, показанной на
фиг.2, то есть с неуправляемой балансировочной
линией 32.
В соответствии с некоторыми примерами
осуществления настоящего изобретения в
балансировочную линию 32 вводят управляющий
клапан 40 для обеспечения возможности
автоматического управления давлением Ре,
приложенного к внешней стороне балансировочного
барабана 28 в соответствии с изображением фиг.3.
На фиг.3 те же самые числовые позиции, что были
использованы в фиг.1 и 2, относятся к тем же или
аналогичным компонентам центробежного
5. 28513
5
компрессора 10. Управляющий клапан 40
регулирует давление в балансировочной камере 34
для изменения противодействующей силы,
формируемой балансировочным барабаном 28,
например, как функции смещения подшипника 20,
или осевой нагрузки на подшипник 20, измеренной
датчиком или зондом 42.
Управляющий клапан 40, таким образом,
управляет значением давления Ре, и соответственно,
величиной компенсирующей осевой нагрузки,
обеспечиваемой балансировочным барабаном 28. А
именно, путем закрытия управляющего клапана 40,
повышают давление Ре, что уменьшает величину
компенсирующей осевой нагрузки, обеспечиваемой
балансировочным барабаном 28. Альтернативно,
открывая управляющий клапан 40, уменьшают
давление Ре, повышая, таким образом, величину
осевой нагрузки, обеспечиваемой балансировочным
барабаном. Когда управляющий клапан 40
полностью открыт, балансировочным барабаном 28
формируется максимальная величина
компенсирующей осевой нагрузки. Поскольку
величина нагрузки, обеспечиваемой
балансировочным барабаном 28, в соответствии с
примерами осуществления настоящего изобретения,
изменяется с возможностью управления,
представляется предпочтительным спроектировать
балансировочный барабан 28 таким образом, чтобы
его максимальная компенсирующая осевая нагрузка
превышала компенсирующую нагрузку
традиционных статических компенсирующих
барабанов (например, путем использования более
крупного балансировочного барабана 28 в системе)
поскольку в упомянутых примерах осуществления
настоящего изобретения существует возможность
уменьшать величину обеспечиваемой компенсации
путем закрытия, если это необходимо,
управляющего клапана 40.
Как указано выше, управляющим клапаном 40
управляют на основе сигнала обратной связи от
зонда или датчика 42, отражающего величину
осевой нагрузки, которую подшипник 20
испытывает в данное время. Измерения могут
выполняться упомянутым зондом или датчиком 42
периодически и отчет о них может передаваться
обратно в управляющую логику 44, которая связана
с управляющим клапаном 40, для реализации
любого требуемого управляющего алгоритма для
открытия или закрытия клапана 40, в соответствии с
необходимостью регулирования для изменений в
процессе работы, в результате которых происходит
увеличение (или уменьшение) остаточной нагрузки
на подшипники 20. Один из примеров связи между
измеренной осевой нагрузкой и работой
управляющей логики 44 для управления давлением
газа с использованием клапана 40 рассмотрен ниже
на примере таблицы 2. Управляющая логика 44
может быть выполнена в виде ASIC, FPGA,
компьютера или процессора иного типа, и может
быть реализована исключительно в виде
аппаратного обеспечения, исключительно в виде
программного обеспечения или в виде какой-либо
их комбинации. Датчик или зонд 42 может быть
любым из множества различных типов. Например,
если подшипник 20 является подшипником АМВ, то
может применяться индуктивный датчик или зонд,
например, для измерения смещения подшипника 20
под действием осевой нагрузки может
использоваться потенциометрический датчик
линейных перемещений (linear potentiometric
displacement transducer, LPDT). Альтернативно, если
подшипник 20 представляет собой подшипник с
масляной смазкой, то более подходящей
реализацией датчика или зонда 42 может быть
вихретоковый датчик или зонд. Как альтернативы
могут применяться другие типы датчиков,
например, пьезоэлектрические, или датчики,
измеряющие давление масляной пленки в
подшипнике.
В соответствии с одним из примеров
осуществления настоящего изобретения
управляющая логика 44 может включать
пропорционально-интегрально-дифференциальный
(proportional integral derivative, PID) контроллер,
который автоматически, в замкнутой петле,
изменяет давление в камере 34 балансировочного
барабана, в зависимости от измеренного осевого
усилия в установке. Например, для подшипников
АМВ, токи в витках обмотки АМВ отражают осевое
усилие, управляемое системой. В частности, если
ток в витках подшипника АМВ, испытывающего
осевое усилие, превосходит заданное значение
(порог), то управляющая логика 44 может
воздействовать на клапан 40 посредством простого
PID-контроллера, в соответствии с некоторыми
примерами осуществления настоящего изобретения
система управления может быть спроектирована с
использованием смещения (значения гистерезиса)
для предотвращения неустойчивых колебаний около
какого-либо значения осевого усилия.
Были проведены испытания для оценки системы
в соответствии с примерами осуществления
настоящего изобретения, проиллюстрированным на
фиг.3, для определения ее способности
обеспечивать более эффективное управление
остаточной нагрузкой на подшипники 20. В
испытаниях использовался тот же тип
центробежного компрессора 10, который
испытывался выше для формирования результатов в
таблице 1, то есть центробежный компрессор с
шестью крыльчатками, вращающимися со
скоростью 17000 об/мин, за исключением того, что
балансировочный барабан 28 был увеличен в
размерах и имеет диаметр, равный 247 мм, для
обеспечения несколько более высокой способности
компенсации осевой нагрузки в данной системе
динамической балансировки. Результаты испытаний
приведены ниже в Таблице 2.
6. 28513
6
Таблица 2
Скорость
потока,
%
Осевая нагрузка
двигателя,
[Н]
Осевая нагрузка
ступеней,
[Н]
Входная осевая
нагрузка,
[Н]
Осевая нагрузка
барабана,
[Н]
Остаточная
нагрузка,
[Н]
141 11055 -74644 60 63141 -448
140 11055 -76773 60 66470 752
130 11055 -103554 65 92105 -394
120 11055 -122331 69 109779 -1497
110 11055 -137399 72 125865 -479
100 11055 -149200 75 137265 -881
90 11055 -157029 77 146551 577
80 11055 -161512 79 150734 277
73 11055 -162875 80 152146 326
В таблице 2 можно увидеть, что давление Ре в
балансировочной камере 34 изменяется по меньшей
мере при большинстве различных значений
скорости потока в таблице под управлением клапана
40. Управляющим клапаном 40 управляют с
помощью датчика или зонда 42 и управляющей
логики 44 так, что его сильнее закрывают
(уменьшают давление Ре) для более высоких
скоростей потока и сильнее открывают
(увеличивают давление Ре) для более низких
скоростей потока. Как можно увидеть из столбца
остаточной нагрузки, это позволяет управлять
остаточной нагрузкой на подшипник 20 в гораздо
более узком диапазоне, чем было возможным без
динамического управления в соответствии с
различными примерами осуществления настоящего
изобретения. Действительно, теперь значения легко
укладываются в расчетные допуски для осевой
нагрузки, выдерживаемой подшипниками АМВ (+/-
9000 Н). Следует отметить, что в данном примере
номинальное давление в балансировочной камере
(то есть, когда управляющий клапан 40 полностью
открыт) рассматриваемой испытательной установке
составляет 52 (5,2 МПа) бар. Специалистам в
настоящей области техники следует понимать, что
параметры, использованные в упомянутых
испытательных установках, связанных с таблицами
1 и 2, во всех отношениях являются исключительно
иллюстративными.
Следует также понимать, что примеры
осуществления настоящего изобретения
обеспечивают возможность оснащения
центробежных компрессоров подшипниками,
способными выдерживать меньшие осевые усилия,
поскольку осевая нагрузка на упомянутые
подшипники управляется более эффективно. В
дополнение, подобные компрессоры потенциально
имеют более высокий коэффициент готовности за
счет уменьшения остаточной нагрузки на
подшипники. Способ управления остаточной осевой
нагрузкой в подобных компрессорных системах в
соответствии с различными примерами
осуществления настоящего изобретения может
выполняться в соответствии с иллюстрацией блок-
схемы алгоритма на фиг.4. На фиг.4, на шаге 100,
измеряют параметр, связанный с осевой нагрузкой
на подшипник. Затем, на шаге 102, управляют
давлением в балансировочной камере,
расположенной вблизи балансировочного барабана
в центробежном компрессоре, на основе
упомянутого измеренного параметра, для
динамической балансировки осевой нагрузки,
воздействующей на упомянутый подшипник.
Описанные выше варианты осуществления
настоящего изобретения предназначены для
иллюстрации, а не для ограничения настоящего
изобретения. Соответственно, настоящее
изобретение допускает множество вариаций в
деталях его реализации, которые могут быть
выполнены на основе описания, приведенного в
настоящем документе, специалистами в настоящей
области техники. Все подобные вариации и
модификации следует считать попадающими в
объем настоящего изобретения, заданный
приложенной формулой изобретения. Ни один
элемент, действие или инструкция, использованная
в описании настоящей заявки, не должны считаться
критичными или необходимыми для настоящего
изобретения, если это явно не указано. Также, в
настоящем документе выражение “один из”
подразумевает включение одного или более
элементов.
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Центробежный компрессор (10), включающий:
узел (18) ротора, включающий по меньшей мере
одну крыльчатку (16);
подшипник (20), соединенный с упомянутым
узлом (18) ротора, для его удержания с
возможностью вращения;
статор (12);
балансировочный барабан (28), размещенный
между упомянутой по меньшей мере одной
крыльчаткой (16) и упомянутым подшипником (20);
балансировочную камеру (34), заданную по
меньшей мере частично внешней стороной
упомянутого балансировочного барабана (28) и
имеющую соединенную с ней балансировочную
линию (32);
датчик (42) для измерения параметра, который
связан с осевой нагрузкой на упомянутый
подшипник (20); и
7. 28513
7
управляющий клапан (40) для изменения
давления в упомянутой балансировочной камере
(34) на основе упомянутого измеренного параметра.
2. Центробежный компрессор по п.1, также
включающий:
управляющую логику, выполненную с
возможностью приема выходного сигнала
упомянутого датчика и управления упомянутым
управляющим клапаном в соответствии с заранее
заданной функцией.
3. Центробежный компрессор по п.2, в котором
упомянутую заранее заданную функцию выполняют
для увеличения давления в упомянутой
балансировочной камере, когда упомянутая осевая
нагрузка на упомянутый подшипник превышает
заранее заданное значение.
4. Центробежный компрессор по любому из
предшествующих пунктов, в котором упомянутый
подшипник является активным магнитным
подшипником.
5. Центробежный компрессор по любому из
предшествующих пунктов, в котором упомянутый
подшипник является подшипником с масляной
смазкой.
6. Центробежный компрессор по любому из
предшествующих пунктов, в котором упомянутый
измеряемый параметр представляет собой смещение
подшипника.
7. Центробежный компрессор по любому из
предшествующих пунктов, в котором упомянутый
измеряемый параметр представляет собой осевую
нагрузку на упомянутый подшипник.
8. Центробежный компрессор по любому из
предшествующих пунктов, в котором упомянутый
датчик является индуктивным датчиком.
9. Центробежный компрессор по любому из
предшествующих пунктов, в котором упомянутый
датчик является пьезоэлектрическим датчиком.
10. Центробежный компрессор по любому из
предшествующих пунктов, в котором упомянутый
датчик является вихретоковым датчиком.
11. Способ динамической балансировки осевой
нагрузки, воздействующей на подшипник (20) в
центробежном компрессоре (10), включающий:
измерение параметра, связанного с осевой
нагрузкой; и
управление давлением в балансировочной
камере (34), находящейся вблизи балансировочного
барабана (28) в упомянутом центробежном
компрессоре (10), на основе упомянутого
измеренного параметра, для динамической
балансировки осевой нагрузки, воздействующей на
упомянутый подшипник (20).
12. Способ по п.11, в котором упомянутый шаг
управления включает также: открытие или закрытие
клапана, соединенного с балансировочной линией,
управляющей упомянутым давлением в упомянутой
балансировочной камере.
13. Способ по п.11 или 12, в котором
упомянутый шаг управления выполняют для
увеличения давления в упомянутой
балансировочной камере, когда упомянутая осевая
нагрузка на упомянутый подшипник превышает
заранее заданное значение.
14. Способ по любому из п.п.11-13, в котором
упомянутый подшипник является активным
магнитным подшипником.
15. Способ по любому из п.п.11-14, в котором
упомянутый подшипник является подшипником с
масляной смазкой.