
Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (10)
Similar to MESIN PEMOTONG KRIPIK
Similar to MESIN PEMOTONG KRIPIK (20)
MESIN PEMOTONG KRIPIK
- 1. Mesin Pemotong (Pembuat Kripik) dengan Sistem kendali berbasis Mikrokontroller Atmega 16 Nama : Muhamad Ishaq NIM : 5301413058 Mata Kuliah : Dasar Sistem Kontrol JURUSAN TEKNIK ELEKTRO UNIVERSITAS NEGERI SEMARANG 2015 BAB I PENDAHULUAN 1 Daskon T.Elektro UNNES
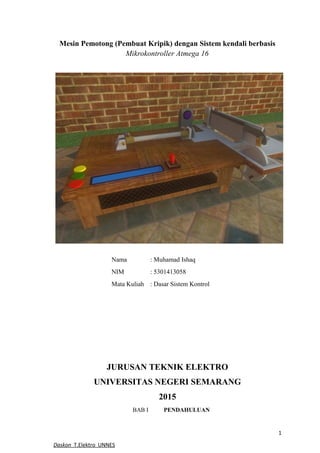
- 2. 1.1 Latar Belakang Dewasa ini perkembangan rekayasa ilmu pengetahuan dan teknologi dari masa ke masa berkembang dengan sangat pesat terutama pada bidang otomasi industry. Perkembangan ini terlihat pada bidang industry, dimana sebelumnya banyak pekerjaan yang menggunakan tenaga manusia, namun kemudian telah beralih menggunakan mesin, lalu semi otomatis dan saat ini sudah menggunakan robotik (full automatic) seperti penggunaan Flexible Manufacturing Sistem (FMS) atau Computerize Integrated Manufacture (CIM) dan sebagainya. Pada otomasi industry dewasa ini tentu tak lepas dari kecanggihan sistem kendali yang digunakan untuk mempermudah dalam pekerjaannya. Alat ini merupakan hasil rancangan saya sendiri yang dimana kendalinya menggunakan mikrokontroller Atmega 16 sebagai otak pengendalinya dan Output/Keluarannya berupa motor DC dan pneumatic. Tujuan di buatnya alat selain sebagai tugas dari mata kuliah dasar sistem kontrol adalah di harapkan dapat membantu para pengusaha kecil di bidang pembuatan kripik yang akan dapat mempercepat hasil produksi mereka dengan lebih cepat, lebih banyak, dan lebih presisi. Para Produksi pembuat keripik akan lebih di mudahkan apabila mengguanakan alat semacam ini. 1.2 Rumusan Masalah Bedasarkan Latar belakang diatas maka rumusan masalah yang akan diangkat adalah ; a) Mengapa pada sistem ini menggunakan Atmega 16 ? b) Bagaimana Analisis secara teorinya ? c) Bagaimana cara kerja sistem ini ? d) Bagaimana skema rangkaian lengkapnya sistem ini ? e) Bagaimanakah penerapannya ? BAB II PEMBAHASAN Sistem kendali ini merupakan sistem Close Loop, yang memiliki feedback dari sensor infrared. Dan berikut ini adalah sedikit gambaran desing rancangan dari alat ini, agar lebih menyakinkan saya mendesignya dalam bentuk gambar 3D (tiga Dimensi) 2 Daskon T.Elektro UNNES
- 3. dapat dilihat dalam beberapa sudut pandang prespektif seperti tampak depan, samping dan atas dan juga penjelsannya ; 3 Daskon T.Elektro UNNES Gambar 1. Design alat Gambar 2. Tampak Depan Gambar 3. Tampak Samping
- 4. Analisis Teoritis Dapat dilihat pada gambar diagram di atas ada titik kalkulasi nah yang dimana akan dikerjakan oleh mikrokontroller sebagai penindak pengontrol sistem, lalu ada sebuah kontroler dari motor yang akan mengatur kerja dari motor tersebut bekerja dengan kecepatan seberapa dan di atur oleh user, dan ada juga sensor infrared yang akan mengirimkan data High/Low tergantung bagaimana nanti kondisi yang terjadi bersifat umpan balik ke sistem. 4 Daskon T.Elektro UNNES G1 (s) G2 (s) H(s) R(s) C(s) Acuan Gambar 4. Tampak Atas
- 5. Secara perhitungan Teoritis maka besar OUTPUT ( C(s) ) nya yang di sebabkan masukan adanya INPUTAN (R(s)) adalah sebagai berikut : )()(2)(1 )(2)(1 )( 1 sss ss s HGG GG C + = Hasil keluaran (output ) adalah sama dengan perkalian input G1 dan G2 dan di bagi oleh hasil kali input G1 dan G2 dan feedback H tersebut. Skema Rangkaian 5 Daskon T.Elektro UNNES KOMPONEN Nama Unit IC Atmega 16 | 1 Capasitor cramic 33pf | 2 Cap Elco 1000uf/16v | 3 Dioda IN4007 | 2 Sensor Infrared | 1 IC 7805 | 1 Alpaneumaric LCD 16x2 | 1 Battray Li-po 3S | 1 Nama Unit Motor DC 12 V | 1 Pneumatic 15 cm | 1 L298 | 1 Selenoid valve | 1 Driver Selenoid | 1 BUTTON | 4 Saklar Toggle | 1 Resistor ¼ W 1k |10
- 6. Cara Kerja Sistem Sistem ini di kendalikan menggunakan sebuah mikrokontroler Atmega 16 yang akan digunakan untuk mengontrol kerja dari Sistem. Outputnya berupa kerja motor DC 12 V. Nah, Kenapa menggunakan mikrokontroller Atmega 16 ? Jawabannya adalah karena pada fitur-fitur yang di miliki oleh mikrokontroler ini sudah cukup untuk bisa menjalankan sistem selain itu harganya lebih murah juga, namun kekurangannya jika anda merancang kendali dengan sistem yang membutuhkan ruang memory yang agak besar maka Atmega 16 ini tidak direkomendasikan karena ruang penyimpanannya lebih kecil bila dibandingkan dengan jenis yang lain. Berikut ini adalah urutan cara kerja dari sistem ; 1. Pertama saklar On/Off di On kan, lalu arus dari catu daya battrey 12V akan masuk ke rangkaian regulator (menurunkan tegangan 12V ke 5V). 2. Pada Rangkaian tersebut saya pakai dioda sebagai pengaman jika pada pemasukan battrey antara positif dan negatif terbalik probenya maka dioda akan bersifat revers dan arus tidak dapat melewati jalur selanjutnya, memang arus ada namun sangat kecil dan seolah-olah arus tak akan pernah bisa melewati dioda tersebut karena bersifat revers. Dan kemudian saya tambahkan kapasitor electrolid/Eko agar berfungsi sebagai penyimapanan sementara muatan dan filter tegangan dari battrey. 3. Arus yang lewat dioda dan kapasitor tadi selanjutnya ke IC 7805 nah, Ic ini bekerja untuk menurunkan tegangan sebesar 5V dengan batas Maks. arus sebesar 1A. Outputan dari IC tersebut difilter lagi dengan Elco 4. Dari output regulator tadi kita dapatkan tegangan 5V DC dan 5V ini akan digunakan untuk kerja mikrokontroller Atmega 16 ini. 5. Setelah mikro sudah dapat bekerja, lalu kerja sistem di setting oleh user. Di sini saya sudah memprogram mikrokontrolernya seperti yang ada di lampiran : 6. User dapat mengatur Mode kecepatan (Tombol warna kuning) potongan dari mesin. Kontrol kecepatan ini saya menggunakan dengan cara PWM (Pulsa With Modulation) untuk mengontrol Tegangan outputan dari mikrokontroler tersebut. Dan nanti akan dapat dikuatkan oleh driver motor. 6 Daskon T.Elektro UNNES
- 7. 7. Kemudian jika tombol START (Tombol warna hijau )di tekan maka mikrokontroler akan bekerja memberi perintah untuk Motor bekerja dengan kecepatan yang sudah di atur tadi. Lalu pneumaticnya juga bekerja mendorong bahan yang akan dipotong /diiris tersebut. Tekanan dari pneumatik saya kecilkan agar didapat kerja yang bagus jadi tidak mendorong paksa bahan yang akan dipotong tersebut. 8. Apabila tombol STOP(warna merah) ditekan maka semua kerja akan berhenti. 9. Kemudian Sensornya digunakan untuk mengontrol kerja keseluruhan, jika pada saat alat bekerja dan ada tangan manusia atau benda lain yang menutupi sensor maka secara otomatis kerja alat akan berhenti. Ket : pada tombol reset berguna jika ditekan program akan mengulang dari awal. Aplikasi Alat ini akan cocok di terapkan kepada para pelaku pengusaha yang bergerak pada bidang pembuatan keripik semisal pada pengirisan kerupuk dengan hasil irisan yang memiliki tingkat presisianya tinggi dan hasilnya akan konstan, jadi hasilnya nanti akan lebih baik bila di bandingkan dengan kerja dengan tenaga manusia. Jika masih menggunakan tenaga manusia kemungkinan terjadinya kesalahan manusia (human eror) akan lebih besar maka alat ini dibuat agar dapat mengurangi tingkat human eror tersebut sehingga proses produksi para pengusaha akan dapat lancar tidak ada gangguan-ganguan seperti human eror, Dan sebagainya. BAB III KESIMPULAN Menurut saya alat ini sudah bagus tinggal bagaimana nanti hasilnya jika dibuat. Dan harapannya kedepan nanti alat ini dapat diproduksi banyak dan dapat membantu para pengusaha kecil yang membutuhkan mesin pemotong dengan biaya minimum dan hasil yang cepat. Mungkin masih banyak kekurangan yang ada pada alat ini Oleh karena itu saran-saran yang membangun akan sangat di butuhkan untuk lebih kompleksnya sistem kendali ini. DAFTAR PUSTAKA http://id.wikipedia.org/wiki/Sistem_kendali diakses pada tanggal 1 jan 2015 http://en.wikipedia.org/wiki/Pneumatics diakses pada tanggal 1 jan 2015 7 Daskon T.Elektro UNNES
- 8. http://id.wikipedia.org/wiki/Pengendali_mikro diakses pada tanggal 2 jan 2015 http://pl.wikipedia.org/wiki/Mikrokontroler diakses pada tanggal 2 jan 2015 http://en.wikipedia.org/wiki/DC_motor diakses pada tanggal 2 jan 2015 LAMPIRAN Source Code Program mikrokontroller #include <mega32.h> #include <stdio.h> #include <delay.h> #include <alcd.h> #define Start PINC.0 #define Stop PINC.1 #define set_kec PINC.2 #define Motor PORTD.4 #define pneumatic PORTC.2 // Declare your global variables void Start(){ lcd_clear(); Motor=50; kanan=0;kiri=1; lcd_gotoxy(0,0);lcd_putsf("Go"); lcd_gotoxy(0,1);lcd_putsf("Processing");} void stop() {lcd_clear();Motor=0; kanan=1;kiri=0; lcd_gotoxy(0,0); lcd_putsf("STOP"); } void stop(){ lcd_clear();pwm=1;kanan=0;kiri=0;} void main(void) { PORTA=0x00; DDRA=0x00; PORTB=0x00; DDRB=0x00; 8 Daskon T.Elektro UNNES
- 9. PORTC=0xFF; DDRC=0x00; PORTD=0x00; DDRD=0x1F; TCCR0=0x00; TCNT0=0x00; OCR0=0x00; TCCR1A=0x00; TCCR1B=0x00; TCNT1H=0x00; TCNT1L=0x00; lcd_init(16); lcd_clear(); lcd_gotoxy(0,1);lcd_putsf("Selamat Datang"); while (1) { // Place your code here if(!Set_keec) {Pwm_naik++;} if(!Start) { if (naik!=1) {delay_ms(70);buka(); delay_ms(140) ;stop();} } if(!stop) {tutup(); delay_ms(140); stop(); } 9 Daskon T.Elektro UNNES
- 10. PORTC=0xFF; DDRC=0x00; PORTD=0x00; DDRD=0x1F; TCCR0=0x00; TCNT0=0x00; OCR0=0x00; TCCR1A=0x00; TCCR1B=0x00; TCNT1H=0x00; TCNT1L=0x00; lcd_init(16); lcd_clear(); lcd_gotoxy(0,1);lcd_putsf("Selamat Datang"); while (1) { // Place your code here if(!Set_keec) {Pwm_naik++;} if(!Start) { if (naik!=1) {delay_ms(70);buka(); delay_ms(140) ;stop();} } if(!stop) {tutup(); delay_ms(140); stop(); } 9 Daskon T.Elektro UNNES