
Recommended
More Related Content
Similar to Lecture15.pdf
Similar to Lecture15.pdf (20)
Recently uploaded
Recently uploaded (20)
Lecture15.pdf
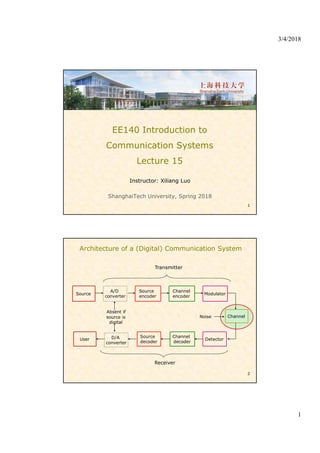
- 1. 3/4/2018 1 EE140 Introduction to Communication Systems Lecture 15 Instructor: Xiliang Luo ShanghaiTech University, Spring 2018 1 Architecture of a (Digital) Communication System 2 Source A/D converter Source encoder Channel encoder Modulator Channel Detector Channel decoder Source decoder D/A converter User Transmitter Receiver Absent if source is digital Noise
- 2. 3/4/2018 2 Contents • Review: Signal design with zero ISI • Tx/Rx filter design with channel response • Equalization 3 Signal Design for Bandlimited Channel Zero ISI • Nyquist condition for Zero ISI for pulse shape 1 0 0 0 or ∑ T • With the above condition, the receiver output simplifies to 4
- 3. 3/4/2018 3 Nyquist Condition: Ideal Case • Nyquist’s first method for eliminating ISI is to use 1 | | 0 / / • = Nyquist bandwidth • The minimum transmission bandwidth for zero ISI. A channel with bandwidth can support a max. transmission rate of 2 symbols/sec 5 Achieving Nyquist Condition • Challenges of designing such or – ( ) is physically unrealizable due to the abrupt transitions at – decays slowly for large t, resulting in little margin of error in sampling times in the receiver – This demands accurate sample point timing - a major challenge in modem / data receiver design – Inaccuracy in symbol timing is referred to as timing jitter 6
- 4. 3/4/2018 4 Practical Solution: Raised Cosine Spectrum • is made up of 3 parts: passband, stopband, and transition band. The transition band is shaped like a cosine wave. 7 Time-Domain Pulse Shape • Taking inverse Fourier transform 8
- 5. 3/4/2018 5 Contents • Review: Signal design with zero ISI • Tx/Rx filter design with channel response • Equalization 9 Optimum Transmit/Receive Filter • Recall that when zero-ISI condition is satisfied by with raised cosine spectrum , then the sampled output of the receiver filter is (assume (0)=1) • Consider binary PAM transmission: • Variance of noise with ∗ ∗ 10 Error Probability can be minimized through a proper choice of H f and H f so that / is maximum (assuming H f fixed and P(f) given)
- 6. 3/4/2018 6 Optimal Solution • Compensate the channel distortion equally between the transmitter and receiver filters / / for • Then, the transmit signal energy is given by • Hence 11 By Parseval’s theorem • Noise variance at the output of the receive filter is 2 2 , Performance loss due to channel distortion • Special case: 1 for |f| – This is the ideal case with “flat” fading – No loss, same as the matched filter receiver for AWGN channel 12 Optimal Solution (cont’d)
- 7. 3/4/2018 7 Exercise • Determine the optimum transmitting and receiving filters for a binary communications system that transmits data at a rate R=1/T = 4800 bps over a channel with a frequency response ; |f| ≤W where W= 4800 Hz • The additive noise is zero-mean white Gaussian with spectral density 2 ⁄ 10 Watt/Hz • Determine the required transmit energy to achieve 10 13 Solution • Since W = 1/T = 4800, we use a signal pulse with a raised cosine spectrum and a roll-off factor = 1 • Thus, 1 2 1 cos | | cos | | 9600 • Therefore cos 9600 1 4800 , for |f| 4800 • One can now use these filters to determine the amount of transmit energy required to achieve a specified error probability 14
- 8. 3/4/2018 8 Performance with ISI • If zero-ISI condition is not met, then • Let • Then 15 • Often only 2 significant terms are considered. • Finding the probability of error in this case is quite difficult. Various approximation can be used (Gaussian approximation, Chernoff bound, etc.) • What is the solution? 16 Performance with ISI
- 9. 3/4/2018 9 Monte Carlo Simulation 17 • If one wants to be within 10% accuracy, how many independent simulation runs do we need? • If ~10 (this is typically the case for optical communication systems), and assume each simulation run takes 1 msec, how long will the simulation take? 18 Monte Carlo Simulation (cont’d)
- 10. 3/4/2018 10 Contents • Review: Signal design with zero ISI • Tx/Rx filter design with channel response • Equalization 19 What is Equalizer • We have shown that – By properly designing the transmitting and receiving filters, one can guarantee zero ISI at sampling instants, thereby minimizing . – Appropriate when the channel is precisely known and its characteristics do not change with time – In practice, the channel is unknown or time-varying • Channel equalizer: a receiving filter with adjustable frequency response to minimize/eliminate inter- symbol interference 20
- 11. 3/4/2018 11 Equalizer Configuration • Overall frequency response • Nyquist criterion for zero-ISI • Ideal zero-ISI equalizer is an inverse channel filter with ∝ 1 | | 1/2 21 Linear Transversal Filter • Finite impulse response (FIR) filter • are the adjustable 2N+1 equalizer coefficients • N is sufficiently large to span the length of ISI 22
- 12. 3/4/2018 12 Zero-Forcing Equalizer • : received pulse from a channel to be equalized • ∑ 1, 0 0, 1, … , To suppose 2N adjacent interference terms 23 Zero-Forcing Equalizer (cont’d) • Rearrange to matrix form 24
- 14. 3/4/2018 14 Solution • The inverse of this matrix (e.g by MATLAB) • Therefore 0.117, 0.158, 0.937, 0.133, 0.091 • Equalized pulse response • It can be verified that 0 1.0 0, 1, 2 27 Solution • Note that values of for 2 or 2 are not zero. For example: 28
- 15. 3/4/2018 15 Minimum Mean-Square Error Equalizer • Drawback of ZF equalizer – Ignores the additive noise – May even amplify the noise power • Alternatively, – Relax zero ISI condition – Minimize the combined power in the residual ISI and additive noise at the output of the equalizer • MMSE equalizer: – a channel equalizer that is optimized based on the minimum mean-square error (MMSE) criterion 29 MMSE Criterion • The output is sampled at : • Let A = desired equalizer output ≜ Minimum 30
- 16. 3/4/2018 16 MMSE Criterion (cont’d) 2 where • MMSE solution is obtained by 0 , 0, 1, … , 31 E is taken over and the additive noise MMSE Equalizer vs. ZF Equalizer • Both can be obtained by solving similar equations • ZF equalizer does not consider effects of noise • MMSE equalizer designed so that mean-square error (consisting of ISI terms and noise at the equalizer output) is minimized • Both equalizers are known as linear equalizers 32
- 17. 3/4/2018 17 Decision Feedback Equalizer (DFE) • DFE is a nonlinear equalizer which attempts to subtract from the current symbol to be detected the ISI created by previously detected symbols 33 Examples of Channels with ISI 34
- 18. 3/4/2018 18 Frequency Response 35 Channel B tends to significantly enhance the noise when a linear equalizer is used (since linear equalizers have to introduce a large gain to compensate for channel null). Performance of MMSE Equalizer 36
- 19. 3/4/2018 19 Performance of DFE 37 Maximum Likelihood Sequence Estimation (MLSE) • Let the transmitting filter have a square root raised cosine frequency response | | 0 • The receiving filter is matched to the transmitter filter with | | 0 • The sampled output from receiving filter is 38
- 20. 3/4/2018 20 MLSE • Assume ISI affects finite number of symbols, with 0 • Then, the channel is equivalent to an FIR discrete- time filter 39 Performance of MLSE 40
- 21. 3/4/2018 21 41 More about Equalization Thanks for your kind attention! Questions? 42