2. 复习拉普拉斯变换有关内容 ( 1 )
1 复数有关概
念 1 )复数、复函数
(
复数 s = σ + jω
复函数 F ( s ) = Fx ( s ) + jF y ( s )
例 1 F ( s ) = s + 2 = σ + 2 + jω
( 2 )模、相
角
模 F ( s ) = Fx2 + F y2
Fy
相角 ∠F ( s ) = arctan
Fx
( 3 )复数的共 F ( s ) = Fx − jF y
轭
( 4 )解析 若 F(s) 在 s 点的各阶导数都存在,则 F(s) 在 s 点解
析。
3. 复习拉普拉斯变换有关内容 ( 2 )
2 拉氏变换的定
义 L[ f ( t )] = F ( s ) = ∞ f ( t ) ⋅ e − st dt F ( s) 像
∫ 0
f ( t ) 原像
3 常见函数的拉氏变换
1 t ≥ 0
( 1 )阶跃函 f ( t ) =
数 0 t < 0
∞
L[ 1( t ) ] = ∫ 1 ⋅ e dt =
− st − 1 − st ∞ − 1
s
e 0 =
s
[ ]
( 0 − 1) = 1
s
0
( 2 )指数函 f ( t ) = e − at
数 ∞ ∞
−( s+ a ) t
L[ f ( t )] = ∫ e − at
⋅ e dt = ∫ e
− st
dt
0 0
−1 − (s + a)t ∞ −1 1
= e = (0−1) =
s+a 0 s + a s+a
4. 复习拉普拉斯变换有关内容 ( 3 )
0 t<0
( 3 )正弦函 f(t) =
数 sin ωt t ≥ 0
∞ ∞
L[ f(t)] = ∫ sin ω t ⋅ e − st
dt = ∫
1 jω t
2j
[ ]
e − e − jωt ⋅ e − st dt
0 0
∞
=∫
2j
e[
1 -(s-jω)t
− e − (s + jω)t dt ]
0
1 − 1 − (s − jω)t ∞ − 1 − (s + jω)t ∞
= s − jω e − e
2j s + jω 0
0
1 1 1 1 2 jω ω
= − = ⋅ 2 = 2
2 j s − jω s + jω 2 j s + ω 2 s + ω 2
5. 复习拉普拉斯变换有关内容 ( 4 )
4 拉氏变换的几个重要定
理
( 1 )线性性 L[ a f 1(t) ± b f 2(t)] = a F1(s) ± b F2(s)
质
( 2 )微分定 L[ f ′( t ) ] = s ⋅ F ( s ) − f ( 0 )
理 ∞ ∞ ∞
证明: = ∫ f ′( t ) ⋅ e dt = ∫ e df ( t ) = e f ( t )
左 − st − st -st
[ ] − ∫ f ( t ) de
∞
0
− st
0 0 0
∞
= [ 0 -f ( 0 ) ] + s ∫ f ( t ) e − st dt = sF ( s ) − f ( 0 ) = 右
0
[ f ( ) ( t ) ] = s F ( s) − s
n n n- 1
f ( 0 ) − s n- 2 f ′( 0 ) − − sf ( n- 2 ) ( 0 ) − f ( n−1) ( 0 )
[
0 初条件下有:L f ( n ) ( t ) = s n F ( s ) ]
6. 复习拉普拉斯变换有关内容 ( 5 )
[
例 2 求L δ ( t ) ]=?
解 δ ( t ) = 1′( t )
. 1
L[ δ( t ) ] = L[ 1′( t ) ] = s ⋅ − 1 ( 0− ) = 1 − 0 = 1
s
[
例 3 求L cos(ω t )] = ?
1
解 cos ω t = [ sin′ ω t ]
. ω
1 1 ω s
L[ cos ω t ] = L[ sin′ ω t ] = ⋅ s ⋅ 2 = 2
ω ω s +ω 2
s +ω2
7. 复习拉普拉斯变换有关内容 ( 6 )
( 3 )积分定 [ 1
] 1
L ∫ f ( t ) dt = ⋅ F ( s ) + f ( -1 ) ( 0)
s s
理
零初始条件下 [ 1
]
L ∫ f ( t ) dt = ⋅ F ( s )
s
有:
进一步有:
1 1 1 1
L ∫∫∫ f ( t ) dt n = n F ( s ) + n f ( −1 ) ( 0 ) + n −1 f ( − 2 ) ( 0 ) + + f ( − n ) ( 0 )
s s s s
n个
例 4 求 L[t]=? t = ∫ 1( t )dt
解 [ ]
1 1 1
L[ t ] = L ∫ 1( t ) dt = ⋅ + t t =0 = 2
s s s
1
s
.
t2 t2
例 5 求 L = ? = ∫ t dt
2 2
[ ] [
解 L t 2 2 = L t dt = ⋅ 2 + ⋅
.
∫
1 1 1 t2
s s
] 1
= 3
s 2 t =0 s
8. 复习拉普拉斯变换有关内容 ( 7 )
( 4 )实位移定 L[ f ( t − τ 0 )] = e − τ 0 ⋅ s ⋅ F ( s )
理 ∞
左
证明: =
∫ 0
f ( t − τ 0 ) ⋅ e − t ⋅ s dt
令 t −τ0 = τ
∞ ∞
=∫ ∫τ
−τ 0 s
f (τ ) ⋅ e − s (τ +τ 0 )
dτ = e f (τ ) ⋅ e −τ s dτ = 右
−τ 0 − 0
0 t < 0
例 f ( t ) = 1 0 < t < a , 求F(s)
6 0 t > a
解 f ( t ) = 1( t ) − 1( t − a )
1 −as 1 1 − e −as
.
L[ f ( t )] = L[1( t ) − 1( t − a )] = − e ⋅ =
s s s
9. 复习拉普拉斯变换有关内容 ( 8 )
( 5 )复位移定 [ ]
L e A⋅t f ( t ) = F ( s − A)
理 ∞ ∞
∫ dt = ∫0 f ( t ) ⋅ e
− ( s − A )⋅ t
证明:左 =
−t⋅s
e f (t ) ⋅ e
At
dt
0
令 s−A=s
∞
= ∫ f (t ) ⋅ e − s ⋅t
dt = F (s ) = F ( s − A) = 右
0
1
例 Le[ ]at
[
= L 1( t ) ⋅ e = at
] =
1
s s → s−a s − a
7 s+3
例 [
L e ⋅ cos 5t = 2
- 3t
]s
s + 5 s →s+3
2
=
( s + 3) 2 + 5 2
8
π
例 Le − 2 t cos ( 5t − ) = Le − 2 t cos 5(t − π )
3 15
9
- 15 s π
π
s − ( s+ 2) s+2
= e = e 15 ⋅
s 2 + 52 s → s+ 2
( s + 2) 2 + 52
10. 复习拉普拉斯变换有关内容 ( 9 )
( 6 )初值定理 lim f ( t ) = lim s ⋅ F ( s )
t →0 s→∞
∞ df ( t ) − s t
证明:由微分定理 ∫
0 dt
⋅ e dt = s ⋅ F ( s ) − f (0)
df ( t ) − s t
⋅ e dt = lim[ s ⋅ F ( s ) − f (0)]
∞
lim ∫
s→∞ 0 dt s→∞
∞ df ( t )
左= ∫ ⋅ lim e − s t dt = 0 ⇒ lim[ s ⋅ F ( s ) − f (0 + )] = 0
0+ dt s→∞ s→∞
f (0 + ) = lim f ( t ) = lim s ⋅ F ( s )
t →0 s→∞
f (t) = t 1
例
1 f (0) = lim s ⋅ F ( s ) = lim s ⋅ 2
=0
10 F ( s) =
s→∞ s→∞ s
s2
11. 复习拉普拉斯变换有关内容 ( 10 )
( 7 )终值定理 lim f ( t ) = lim s ⋅ F ( s ) (终值确实存在
t →∞ s→0
时)
∞ df ( t ) − s t
证明:由微分定理 ∫0 dt
⋅ e dt = s ⋅ F ( s ) − f (0)
df ( t ) − s t
⋅ e dt = lim[ s ⋅ F ( s ) − f (0)]
∞
lim ∫
s→0 0 dt s→0
∞ df ( t ) ∞ t
左=∫ ⋅ lim e dt = ∫0 df (t ) = lim ∫0 df ( t )
−st
t →∞
0 dt s → 0
= lim[ f ( t ) − f (0)] = 右 = lim[ s ⋅ F ( s ) − f (0)]
s→0
t →∞
1 1 1
例 F ( s) = f ( ∞ ) = lim s =
11 s( s + a )( s + b) s→0 s( s + a )( s + b ) ab
ω ω
例 F ( s) = 2 f ( ∞ ) = sin ωt t →∞ ≠ lim s 2 2 = 0
12 s + ω2 s→0 s +ω
12. 复习拉普拉斯变换有关内容 ( 11 )
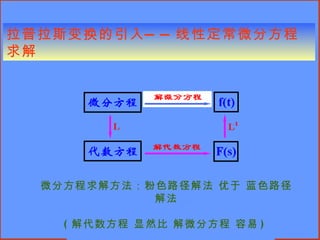
用拉氏变换方法解微分方
程
系统微分方程
y′′( t ) + a1 ⋅ y′( t ) + a 2 ⋅ y( t ) = 1( t )
y ( 0 ) = y ′( 0 ) = 0
1
L变 ( s + a1 s + a 2 ) ⋅ Y ( s ) =
2
换 s
1
Y ( s) =
s( s 2 + a1 s + a 2 )
L 变换
-1 y ( t ) = L−1 [Y ( s )]
13. 小结
∞
1 拉氏变换的定
义
F ( s) = ∫
0
f ( t ) ⋅ e − ts dt
2 常见函数 L 变换 f (t ) F (s )
( 1 )单位脉 δ (t ) 1
冲
( 2 )单位阶 1( t ) 1s
跃 2
( 3 )单位斜 t 1s
坡 3
( 4 )单位加速 t2 2 1s
度
( 5 )指数函 e − at 1 (s + a)
数
( 6 )正弦函 sin ω t ω (s2 + ω 2 )
数
( 7 )余弦函 cos ω t s (s2 + ω 2 )
数
14. 小结
3 L 变换重要定
理
( 1 )线性性 L[ a f 1(t) ± b f 2(t)] = a F1(s) ± b F2(s)
质
( 2 )微分定 L[ f ′( t ) ] = s ⋅ F ( s ) − f ( 0)
理
( 3 )积分定 [ ] 1 1
L ∫ f ( t ) dt = ⋅ F ( s ) + f ( -1 ) ( 0 )
s s
理
( 4 )实位移定 L [ f ( t − τ )] = e − τs⋅ ⋅ F ( s )
[ ]
理
( 5 )复位移定 L e A⋅t f ( t ) = F ( s − A)
理
( 6 )初值定 lim f ( t ) = lim s ⋅ F ( s )
t →0 s→∞
理
( 7 )终值定 lim f ( t ) = lim s ⋅ F ( s )
t →∞ s→0
理