
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Smart Materials: SMA & EAP
Similar to Smart Materials: SMA & EAP (20)
More from Sisubalan Selvan
More from Sisubalan Selvan (20)
Recently uploaded
Recently uploaded (20)
Smart Materials: SMA & EAP
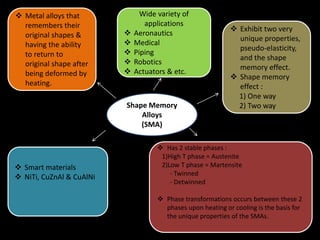
- 1. Shape Memory Alloys (SMA) Metal alloys that remembers their original shapes & having the ability to return to original shape after being deformed by heating. Wide variety of applications Aeronautics Medical Piping Robotics Actuators & etc. Smart materials NiTi, CuZnAl & CuAlNi Exhibit two very unique properties, pseudo-elasticity, and the shape memory effect. Shape memory effect : 1) One way 2) Two way Has 2 stable phases : 1)High T phase = Austenite 2)Low T phase = Martensite - Twinned - Detwinned Phase transformations occurs between these 2 phases upon heating or cooling is the basis for the unique properties of the SMAs.
- 2. How Shape Memory Alloys Work?? • Martensite, is the relatively soft and easily deformed phase of shape memory alloys, which exists at lower temperatures. The molecular structure in this phase is twinned which is the configuration shown in the middle of Figure 2. Upon deformation this phase takes on the second form shown in Figure 2, on the right. Austenite, the stronger phase of shape memory alloys, occurs at higher temperatures. The shape of the Austenite structure is cubic, the structure shown on the left side of Figure 2. The un-deformed Martensite phase is the same size and shape as the cubic Austenite phase on a macroscopic scale, so that no change in size or shape is visible in shape memory alloys until the Martensite is deformed. Figure 2: Microscopic and Macroscopic Views of the Two Phases of Shape Memory Alloys
- 3. Shape Memory Effect Figure 4: Microscopic Diagram of the Shape Memory Effect
- 4. Shape Memory Effect • 2 types : 1) One way shape memory 2) Two way shape memory
- 5. Shape Memory Effect One way • When a shape-memory alloy is in its cold state ,the metal can be bent or stretched and will hold those shapes until heated above the transition temp. Upon heating, the shape changes to its original. When the metal cools again it will remain in the hot shape, until deformed again. • With the one-way effect, cooling from high temperatures does not cause a macroscopic shape change. A deformation is necessary to create the low-temperature shape. On heating, transformation starts at As and is completed at Af (typically 2 to 20 °C or hotter, depending on the alloy or the loading conditions). As is determined by the alloy type and composition and can vary between −150 °C and 200 °C.
- 6. Shape Memory Effect Two way • The two way shape memory effect is the effect that the material remembers two different shapes: - one at low temperatures - one at the high-temperature shape • A material that shows a shape-memory effect during both heating and cooling is said to have two-way shape memory. This can also be obtained without the application of an external force (intrinsic two-way effect). • The reason the material behaves so differently in these situations lies in training. Training implies that a shape memory can "learn" to behave in a certain way. Under normal circumstances, a shape-memory alloy "remembers" its low-temperature shape, but upon heating to recover the high-temperature shape, immediately "forgets" the low- temperature shape. However, it can be "trained" to "remember" to leave some reminders of the deformed low- temperature condition in the high-temperature phases. There are several ways of doing this. A shaped, trained object heated beyond a certain point will lose the two-way memory effect.
- 7. Pseudo-elasticity • Unlike the shape memory effect, pseudo-elasticity occurs without a change in temperature. • Occurs when an alloy is completely in the Austenite phase • Not dependent on temperature • When the load is increased to a point, the alloy transitionss from the Austenite phase to the detwinned Martensite phase. • Once the load is removed, the alloy returns to it original Austenite shape. • Rubber like effect.
- 9. Advantages and Disadvantages of Shape Memory Alloys Some of the main advantages of shape memory alloys include: • Bio-compatibility • Diverse Fields of Application • Good Mechanical Properties (strong, corrosion resistant) • These alloys are still relatively expensive to manufacture and machine compared to other materials such as steel and aluminum. • Most SMA's have poor fatigue properties; this means that while under the same loading conditions (i.e. twisting, bending, compressing) a steel component may survive for more than one hundred times more cycles than an SMA element.
- 10. Application 1 : The Smart Wing • The smart is a new tech that uses SMA (Nitinol wires) to change the shape of the wings of a plane to make it more maneuverable. • This done by simply sending electric current, throw the part of the plane to heat it to the desired temperature. • This changes the shapes of the wing making the plane more maneuverable. • This was previously done with heavy hydraulic system, thus significantly reducing the weight of the plane. • Nitinol wires can be used in applications such as the actuators for planes. Many use bulky hydraulic systems which are expensive and need a lot of maintenance.
- 11. The wires in the picture are used to replace the actuator. Electric pulses sent through the wires allow for precise movement of the wings, as would be needed in an aircraft. This reduces the need for maintenance, weighs less, and is less costly.
- 12. Application 2 : Pipe Coupling • Using SMA for coupling tubing. • Mechanisms : – A memory alloy coupling is expanded so it fits over the tubing (a). – When the coupling is reheated, it shrinks back to its original diameter (b), squeezing the tubing for a tight fit (c) .
- 13. SMA vs Traditional Fittings • Lighter than traditional tube fittings • Compact structure • High sealing performance • Cheaper • TiNi aniti corrosion • Strong adaptability & suitable for connection among dissimilar materials which cannot be welded.
- 14. Electroactive Polymer • Definition: polymers that exhibit a change in size or shape when stimulated by an electric field. • Coupling involved: Electromechanical Coupling (Electrical Domain) Electric Field is applied (Mechanical Domain) Polymer start to expand, contract or bend
- 15. • Small stress but large strain • Low Young’s Modulus (modulus of elasticity)
- 16. Classification of Electroactive Polymer Dielectric Ferroelectric Polymer Electrostrictive Graft Polymer Liquid Crystalline Polymer Ionic Electrorheological fluid Ionic Polymer- metal composite Stimuli Responsive Gel
- 17. Dielectric VS Ionic Dielectric Ionic Actuation caused by electrostatic forces between two electrodes Actuation caused by the displacement of ions inside the polymers Require high activation fields ( >10V/μm ) Require low activation field ( only 1- 2V/μm ) Require no power to keep the actuator at a given position Require energy to keep the actuator at a given position Can be operated in air Need to maintain wetness (must always have electrolyte for ionic reaction)
- 18. Artificial Muscle • Dielectric elastomer have large elongation strain (120– 380%), large stress (3.2MPa) ,high speed of response (10−3s), and high specific elastic energy density (3.4 J/g) • Transform electrical energy directly into mechanical work and produce large strain • Actuators are composed primarily of thin passive elastomer film with two compliant electrodes on the surface • When electrical voltage is applied to the electrodes, an electrostatic force is generated between the electrodes. • Application: Robotic
- 20. Heart E-Gel • Used to stop the bleeding in an artery/vein. • Mechanism: a delivery device with electroactive gel which has been electrically shrunk is introduced until it is at the target location. • Once at the target location, the electrical bias is removed to allow the gel to swell to a fully swollen gel enough to stop the bleeding. • Application: medical
- 22. Advantages Limitations Easily processed, cheap, lightweight, can conform to complicated shapes and surfaces. maximum actuation capabilities are restricted by the dielectric strength (breakdown voltage) of elastomer film Large strain High mechanical energy density