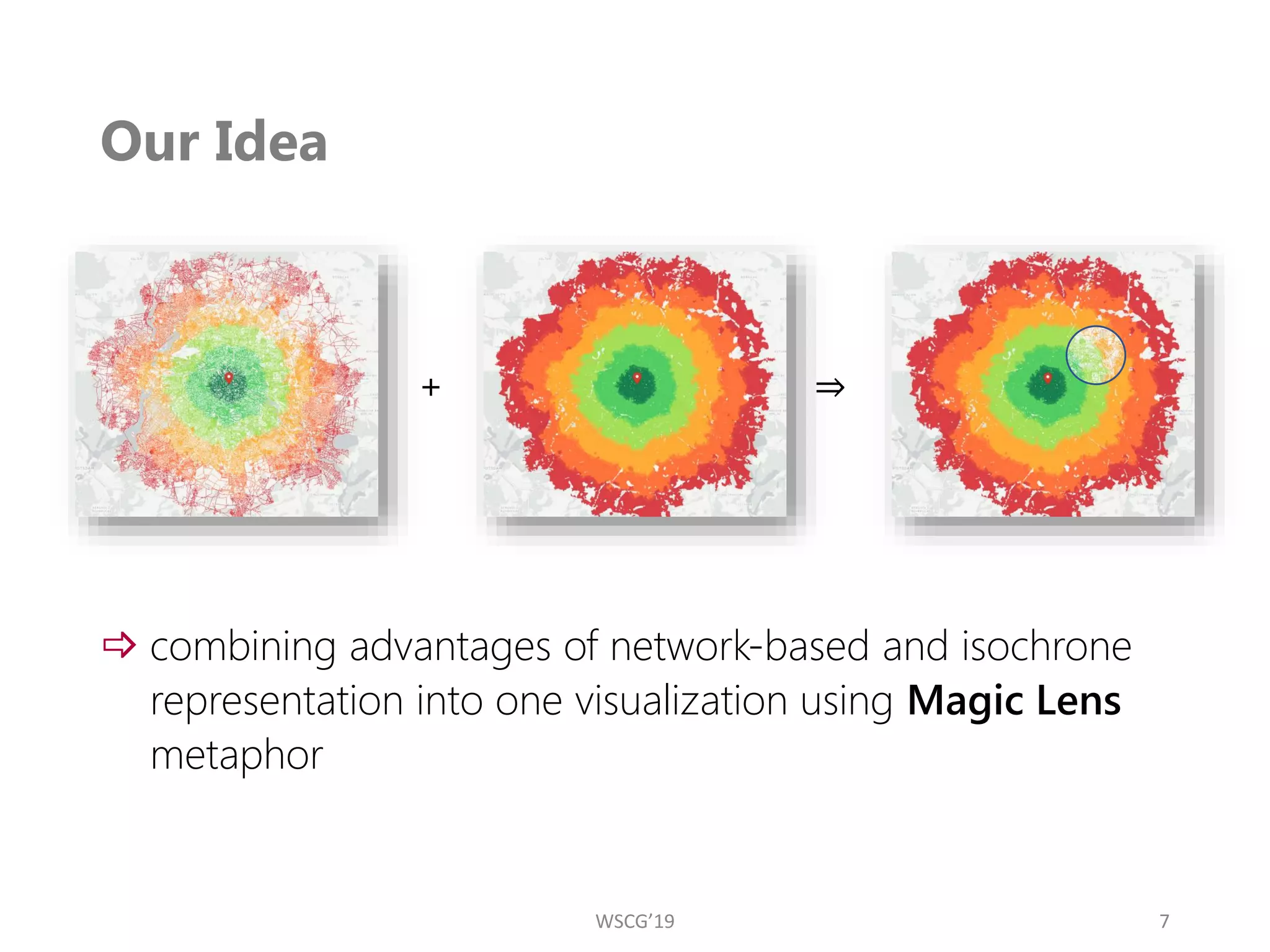
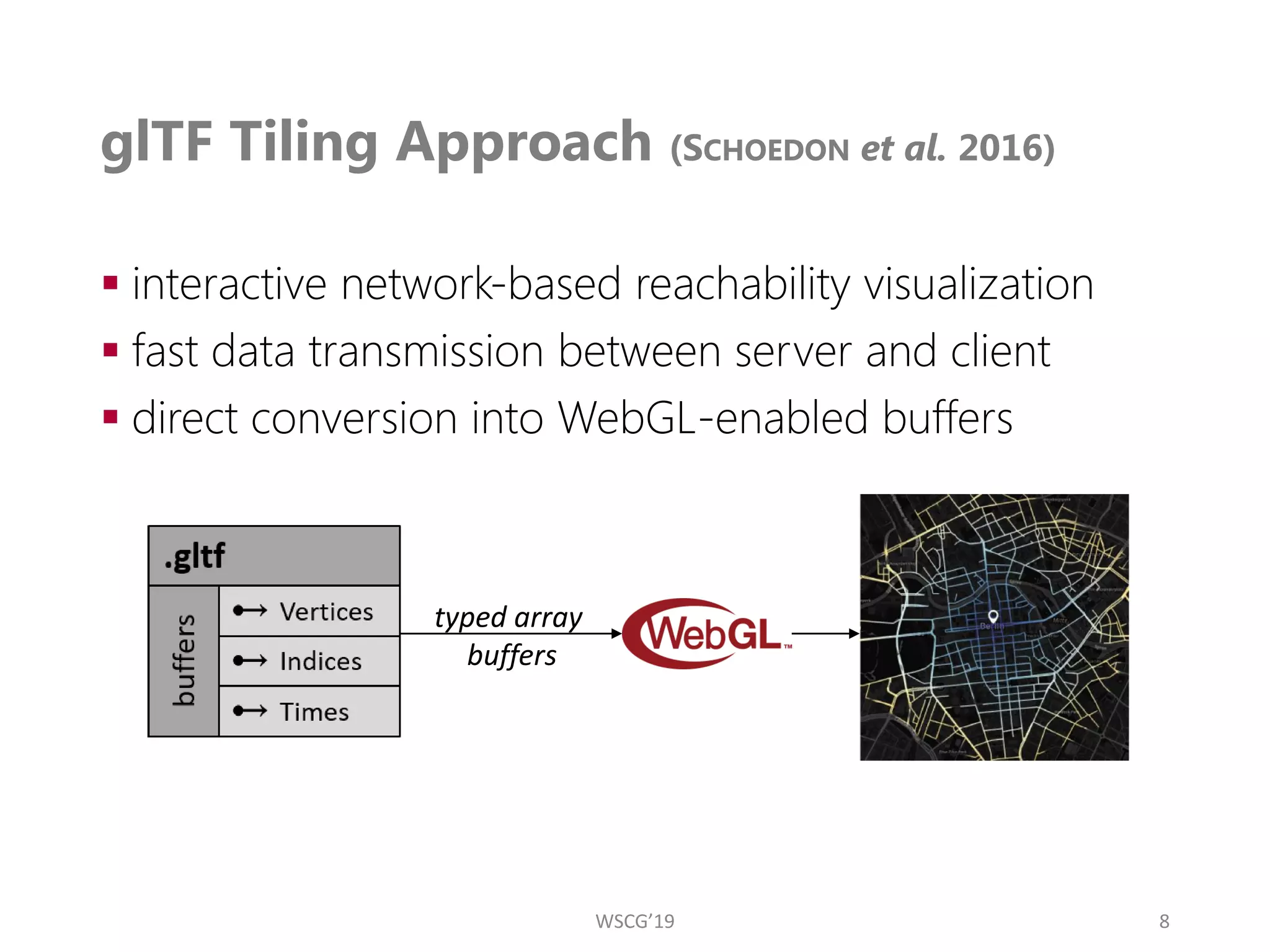
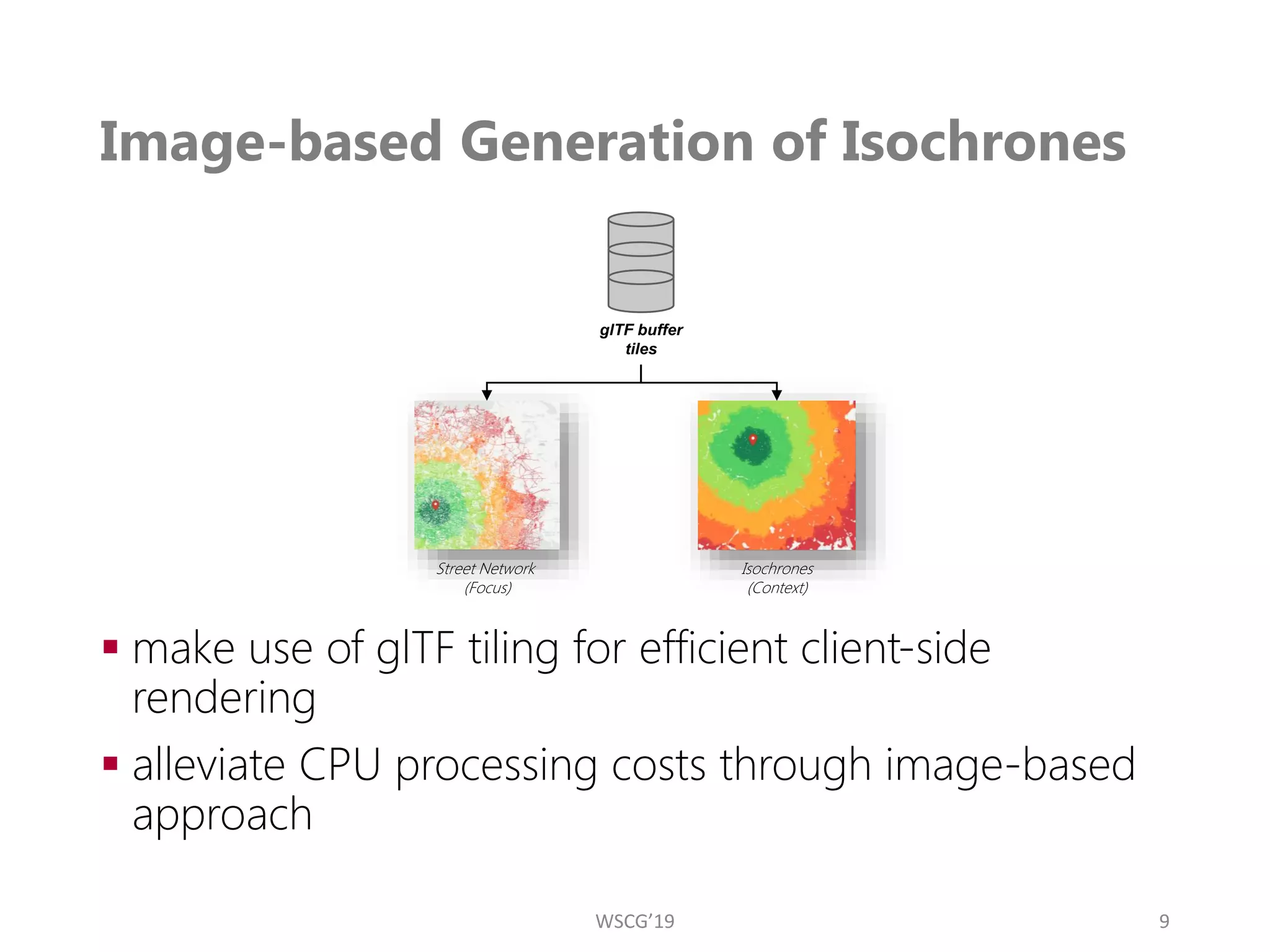
The document discusses innovative lens-based focus+context visualization techniques for web-based reachability maps that enhance mobility analytics. It emphasizes combining network-based and isochronal approaches to provide detailed representation and interactive exploration of geographic reachability data. The proposed solution leverages GPU support for efficient rendering and real-time user interaction, addressing common limitations in traditional reachability mapping methods.
![Lens-based Focus+Context
Visualization Techniques
for Interactive Exploration of Web-
based Reachability Maps
WSCG’19, Plzeň
28 May 2019
Marc Listemann [marc.Listemann@dlr.de]
Matthias Trapp [trapp@hpi.de]
Jürgen Döllner [doellner@hpi.de]](https://image.slidesharecdn.com/2019-wscg-lens-basedfocuscontextvisualizationtechniques-online-220628124623-5869fbbd/75/Lens-based-Focus-Context-Visualization-Techniques-1-2048.jpg)