DEVELOPING A REAL TIME DATA ACQUISITION , FLY-BY-WIRE COMMUNICATION SYSTEM FO...
TRB 15_2166_Poster_SHZ
1. Abstract
Smartphones and other portable personal devices that
integrate global positioning systems (GPS), Bluetooth Low
Energy (BLE), and advanced computing technologies have
become more accessible . This study proposes a method of
warning drivers of horizontal curves in order to prevent motor
vehicles from running off the road. The system can track
driver speed and compare vehicle position with curve
locations in a real-time fashion. Messages can be wirelessly
communicated from the smartphone to a receiving unit
through BLE technology, and then displayed by HUD on the
vehicle’s front windshield.
Objectives
Design, test, and evaluate a smartphone-based horizontal
curve warning system.
Define System Architecture and Functional Requirements.
Evaluate System Integration and Reliability.
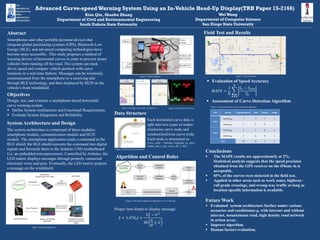
Conclusions
The MAPE results are approximately at 2%.
Statistical analysis suggests that the speed precision
obtained from the GPS receiver on the iPhone 4s is
acceptable.
85% of the curves were detected in the field test.
Applied to other areas such as work zones, highway-
rail grade crossings, and wrong-way traffic as long as
location-specific information is available.
Future Work
Evaluated system architecture further under various
scenarios and conditions(e.g. with internet and without
internet, mountainous road, high density road network
in urban area) .
Improve algorithm.
Human factors evaluation.
Field Test and Results
Advanced Curve-speed Warning System Using an In-Vehicle Head-Up Display(TRB Paper 15-2166)
Xiao Qin, Shaohu Zhang
Department of Civil and Environmental Engineering
South Dakota State University
WeiWang
Department of Computer Science
San Diego State University
System Architecture and Design
The system architecture is comprised of three modules:
smartphone module, communication module and HUD
module. The smartphone application sends a command to the
BLE shield; the BLE shield converts the command into digital
signals and forwards them to the Arduino UNO motherboard
(i.e. an embedded microprocessor). Controlled by Arduino, the
LED matrix displays messages through properly connected
electronic wires and pins. Eventually, the LED matrix projects
a message on the windshield.
𝑆 = 1.47𝑉0 𝑡 +
𝑉0
2
− 𝑉2
30
𝑎
𝑔 ± 𝐺
Trip Journey Expected Alerts Valid Missed Invalid
Trip 1
JourneyAB 7 5 1 1
JourneyBA 7 6 0 1
Trip 2
JourneyAB 7 7 0 0
JourneyBA 7 6 0 1
Total 28 24 1 3
Figure 1 System Architecture
Figure 2 Actual Hardware
Figure 3 Interface Screenshots in iPhone 4s Figure 4 Inverted Curve Arrows
Figure 5 Horizontal Curve Scenario
Each horizontal curve data is
split into two types of nodes:
clockwise curve node and
counterclockwise curve node.
Each node is structured as:
Curve_node = {latitude, longitude, loc_desc,
Grade, curve_type, curve_dir, V, SD}
Data Structure
Algorithm and Control Rules
Figure 6 iOS Mobile application Algorithm of Curve Warning
Evaluation of Speed Accuracy
𝑀𝐴𝑃𝐸 =
1
𝑁
𝑆 𝑣 − 𝑆 𝐺𝑃𝑆
𝑆 𝑣
𝑁
𝑛=0
Assessment of Curve Detection Algorithm
Figure 7 Field Test Route
Table 1 Assessment Result of Curve Detection Algorithm
Proper time-frame to display message: