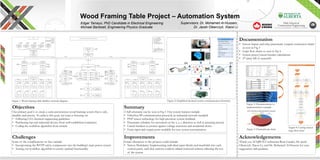
More Related Content Similar to IRC_Poster_WFTPElectrical_Final (20) 1. Wood Framing Table Project – Automation System
Edgar Tamayo, PhD Candidate in Electrical Engineering
Michael Bardwell, Engineering Physics Graduate
Supervisors: Dr. Mohamed Al-Hussein,
Dr. Jacek Olearczyk, Xiaoxi Li
Objectives
Our primary goal is to create a semi-autonomous wood framing system that is safe,
durable, and precise. To achieve this goal, our team is focusing on:
• Following CSA electrical engineering guidelines
• Purchasing top-end industrial devices from well-established companies
• Coding the workflow algorithm from scratch
Documentation
• Sensor (input) and relay/pneumatic (output) connection charts
as seen in Fig 3
• Logic flow charts as seen in Fig 4
• System power/circuit breaker calculations
• 3rd party bill of material’s
Figure 4: Cutting station
logic flow chart
Summary
A full schematic can be seen in Fig 1. Our system features include:
• EtherNet/IP communication protocol; an industrial network standard
• PNP sensor technology for high-precision system feedback
• Pneumatic cylinders for movement in the x, y, z direction as well as actuating pistons
• Circuit breakers to protect against voltage transients and accidental shorts
• Extra input and output ports available for easy system customization
Challenges
Some of the complications we face include:
• Incorporating the WFTP safety components into the building’s main power system
• Testing our workflow algorithm to ensure optimal functionality
Figure 2: Simplified electrical system communication flowchart
Item #
Human Machine Interface 1
Programmable Logic Controller 2
Gateway 3
Input Block 4
Solenoid Valve Manifold 5
Sensor 6
Pneumatic Cylinder 7
Motor Controller 8
Motor 9
A B
1
2
6/4 3 5/7
8
9
Improvements
Future alterations to the projects could include:
• Station Modularity: Implementing individual input blocks and manifolds into each
control panel, such that stations could be added/removed without affecting the rest
of the system
Acknowledgements
Thank you ACQBUILT technician Ryan Gaudet, Dr. Jacek
Olearczyk, Xiaoxi Li, and Dr. Mohamed Al-Hussein for your
suggestions and guidance
Figure 1: Wood framing table fieldbus network diagram
WOOD FRAMING TABLE FIELDBUS NETWORK DIAGRAM
Programmable Logic Controller
TM251MESE
Human Machine Interface
HMISTU855
ENET
Left Side
ENET 490NTW00002U
Right Side
Legend
· 1ST: 1 Pin Screw Terminal
· 3ST: 3 Pin Screw Terminal
· 5ST: 5 Pin Screw Terminal
· 3WP: 3 Pin Wall Plug
· ENET: Ethernet
· CP: Cable Provided With Unit
· CB1*/CB2*/CB3*/CB4*: 14 AWG
Notes
· J1* tag is a PTI/PTO Daisy Chain
between Motor Drive on Left side and
Motor Drive on Right side. Cable
provided
EX9-AC020EN-PSRJ
ENET 490NTW00002U
P1*3ST
CP - PTI/PTO
Daisy Chain
Motor Drive
LXM32MD18M2
Ethernet Card
VW3A3616
ENET
CP – Power and Encoder
Motor Drive
LXM32MD18M2
Ethernet Card
VW3A3616
CP – Power and Encoder
Servo Motor
BMH0702T06A2A
Servo Motor
BMH0702T06A2A
CP – PTI/PTO
Daisy Chain
Motor Drive
LXM32MD18M2
Ethernet Card
VW3A3616
ENET
CP – Power and Encoder
Motor Drive
LXM32MD18M2
Ethernet Card
VW3A3616
CP – Power and Encoder
Fieldbus System – Gateway Decentralized Type
EX500GEN2
Nailing/Dragging
Input Unit
EX500DXPA
Valve Manifold
SS5Y5-11S0-13BS-N7
M12
Input Unit
EX500DXPA
Valve Manifold
SS5Y5-11S0-13BS-N7
M12 Nailing/Dragging
M12 M12
Motor Drive
JXC917
Motor Drive
JXC917
Linear Actuator
LEY25B150MGR1C918
Linear Actuator
LEY25B150MGR1C918
CP
CP
ENET
RI3
RI4
RO3
RO4
LI3
LI4
LO3
LO4
CP
EX9-AC020EN-PSRJ
M12 M12
Valve Manifold
SS5Y5-11S0-03BS-N7
Input Unit
EX500DXPA
M12 Cutting
Valve Manifold
SS5Y5-11S0-03BS-N7
M12
RI1
RI2
RO1
RO2
Drilling
Output Block
EX9-OET1
Valve Manifold
SS5Y5-11S0-03BS-N7
Valve Manifold
SS5Y5-11S0-03BS-N7
Input Unit
EX500DXPA
M12Cutting
Drilling M12
LI1
LI2
LO1
LO2
Output Block
EX9-OET1
RO5LO5
LEFT INPUTS/OUTPUTS
3 Inputs
LI4
M12
13 Inputs
LI3
M12
4 Inputs
LI1
M12
7 Inputs
LI2
M12
3 Outputs
LO1
M12
3 Outputs
LO2
M12
2 Outputs
LO4
M12
12 Outputs
LO3
M12
2 Outputs
LO5
M12
Drilling Cutting Nailing Dragging Relays
RIGHT INPUTS/OUTPUTS
3 Inputs
RI4
M12
13 Inputs
RI3
M12
4 Inputs
RI1
M12
7 Inputs
RI2
M12
3 Outputs
RO1
M12
3 Outputs
RO2
M12
2 Outputs
RO4
M12
12 Outputs
RO3
M12
2 Outputs
RO5
M12
DrillingCuttingNailingDraggingRelays
CB1* J1*
CB2*
80A Circuit Breaker
QO280
14 AWG
14 AWG
Power
14 AWG
PS1*
PS2*
PS3*
24V Power Supply
ABL8RPM24200
10 AWG
15A Circuit Breaker
9926252015
15A Circuit Breaker
9926252015
15A Circuit Breaker
9926252015
15A Circuit Breaker
9926252015
CB2*CB1* CB3* CB4*
25A Circuit Breaker
9926252025
14 AWG 14 AWG
120VAC Source
4 AWG
J1*
CB3*
CB4*
Servo Motor
BMH0702T06A2A
Servo Motor
BMH0702T06A2A
P2*
3STP3*
3STP3*
Figure 3: Documentation to
implementation example
ADDRESS
0 INPUT #0
INPUT #11
2 INPUT #2
DIGITAL INPUT
PLC: TM251MESE
3 INPUT #3
INPUT #44
5 INPUT #5
6 INPUT #6
INPUT #77
8 INPUT #8
1. ZS-1L
2.
3. JAW OPEN/CLOSE SWITCH
4.
5. DRAGGING
IN
-VDC
+VDC
CKZ2N80 BUILT-IN
QMIS-0P-0F
1. ZS-2L
2.
3. DETECTS WOOD BEHIND JAW
4.
5. DRAGGING
IN
-VDC
+VDC
1. ZS-3LA
2.
3. DETECT NAILER HORIZ. IN
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
9
10
11
1. ZS-3LB
2.
3. DETECT NAILER HORIZ. OUT
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
12
13
14
1. ZS-4LA
2.
3. DETECT CLAMP POS. A
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
1. ZS-4LB
2.
3. DETECT CLAMP POS. B
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
18
19
20
1. ZS-8LA
2.
3. TELESCOPIC CYL. PIN POS. A
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
21
22
23
1. ZS-8LB
2.
3. TELESCOPIC CYL. PIN POS. B
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
24
25
26
1. ZS-8LC
2.
3. TELESCOPIC CYL. PIN POS. C
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
9 INPUT #927
28
29
1. ZS-10L
2.
3. DETECT STOP. PLATE DIAG.
4.
5. NAILING
IN
-VDC
+VDC
D-M9PLAPC
INPUT #1010
11 INPUT #11
INPUT #1212
13
14
15
INPUT #13
INPUT #14
INPUT #15
16
17
18
INPUT #16
INPUT #17
INPUT #18
19
20
21
INPUT #19
INPUT #20
INPUT #21
22
23
INPUT #22
INPUT #23
24
COM
INPUT #24
COMMON
1. ZS-11/12LB
2.
3. DETECT TABLE UP FOR 2X6
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
1. ZS-13L
2.
3. DETECTS WOOD FRAME
4.
5. PRESENCE OF WOOD
IN
-VDC
+VDC
QMIS-0P-0F
1. ZS-14L
2.
3. DETECTS STUD
4.
5. PRESENCE OF WOOD
IN
-VDC
+VDC
OPT2040
1. ZS-15LA
2.
3. SAW POSITION ¾ CUT ON 2X4
4.
5. CUTTING
IN
-VDC
+VDC
D-M9PLAPC
1. ZS-15LB
2.
3. SAW POSITION FULL CUT ON 2X4
4.
5. CUTTING
IN
-VDC
+VDC
D-M9PLAPC
1. ZS-15LC
2.
3. SAW POSITION FULL CUT ON 2X6
4.
5. CUTTING
IN
-VDC
+VDC
D-M9PLAPC
1. ZS-16LA
2.
3. CLAMP POSITION – 2X6
4.
5. CUTTING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
1. ZS-16LB
2.
3. CLAMP POSITION – 2X4
4.
5. CUTTING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
1. ZS-16LC
2.
3. CLAMP POSITION – DISENGAGED
4.
5. CUTTING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
1. ZS-17L
2.
3. DETECT GRIPPER FINAL POS.
4.
5. CUTTING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
1. ZS-18L
2.
3. DETECT DRILL UP/DOWN
4.
5. DRILLING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
1. ZS-19L
2.
3. DETECT DRILL HORIZ IN/OUT
4.
5. DRILLING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
1. ZS-20LA
2.
3. DETECT CLAMP ENGAGED
4.
5. DRILLING
IN
-VDC
+VDC
D-M9PLAPC
1. ZS-20LB
2.
3. DETECT CLAMP DISENGAGED
4.
5. DRILLING
IN
-VDC
+VDC
D-M9PLAPC
1. ZS-11/12LA
2.
3. DETECT TABLE UP FOR 2X4
4.
5. NAILING
IN
-VDC
+VDC
LJ12A3-4-Z/BY
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
3
4
5
6
7
8
0
1
2
15
16
17
0V
NOTES
1. ALL CONNECTIONS MADE THROUGH EX500GEN2
LEGEND
FUSE PROTECTED
1. INSTRUMENT TAG
2. INSTRUMENT SIGNAL DESCRIPTION
3. INSTRUMENT SERVICE
4. CROSS REFERENCE DRAWING
5. FRAMING STATION
FIELD DEVICE
+24VDC WIRE TYPE JUMPER ROUTING
+24VDC
COM
Figure 5: Financials pie chart
Devices,
$6,262.28, 25%
Actuators,
$15,667.63, 64%
Accessories,
$2,395.51, 10%
Software,
$225.00, 1%
WFTP ELECTRICAL AND PNEUMATIC FINANCES