Download as PDF, PPTX




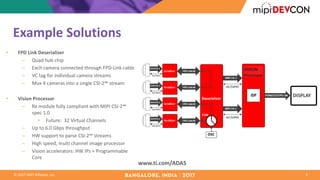
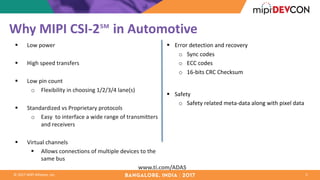
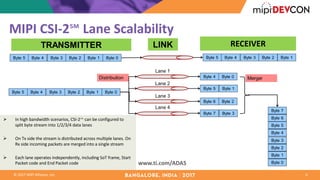
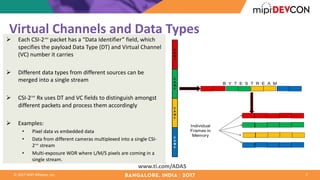

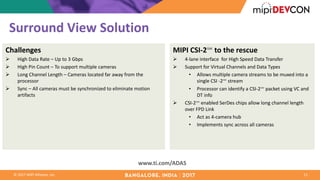
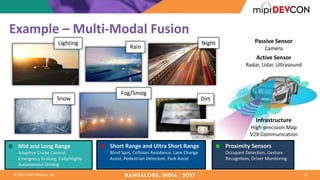
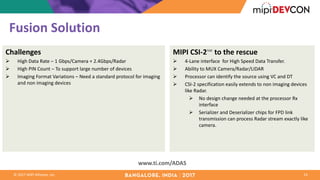
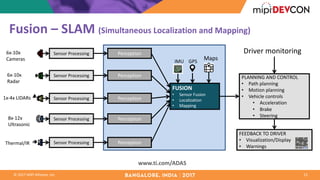
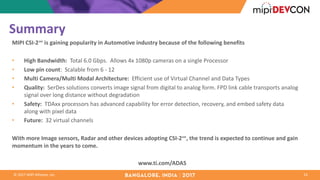


The document discusses high bandwidth imaging strategies for automotive applications, focusing on the implementation of MIPI CSI-2 SM technology to meet the challenges of high data rates, multi-camera systems, and automotive safety. It outlines the benefits of MIPI CSI-2 SM, including low power consumption, high-speed transfers, and the capability to handle multiple video streams through virtual channels. Future developments may lead to increased usage of this technology to integrate more image sensors and devices in automotive systems.






















































