Downloaded 470 times



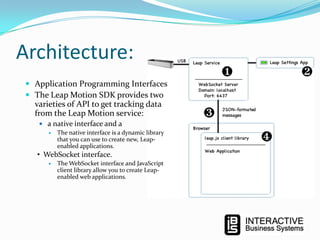
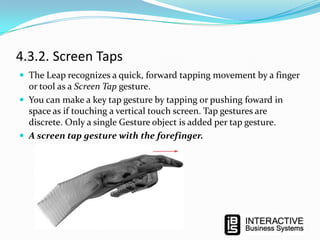


The document provides an overview of the Leap Motion controller and its capabilities. It describes how the Leap Motion tracks hands, fingers, and gestures in 3D space without requiring the user to touch any surface. It analyzes motion data and recognizes gestures like swipes, circles, and taps. The Leap Motion SDK provides APIs to access this tracking data and develop applications using languages like C++, Java, Python and JavaScript. Developers can build apps for interaction, control, and immersion using just hand motions and gestures.
![[PDF] the molecular control toolkit - Controlling 3D molecular graphics via g...](https://cdn.slidesharecdn.com/ss_thumbnails/pdfthemolecularcontroltoolkit-controlling3dmoleculargraphicsviagestureandvoice-150320221855-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)

























































