Download to read offline
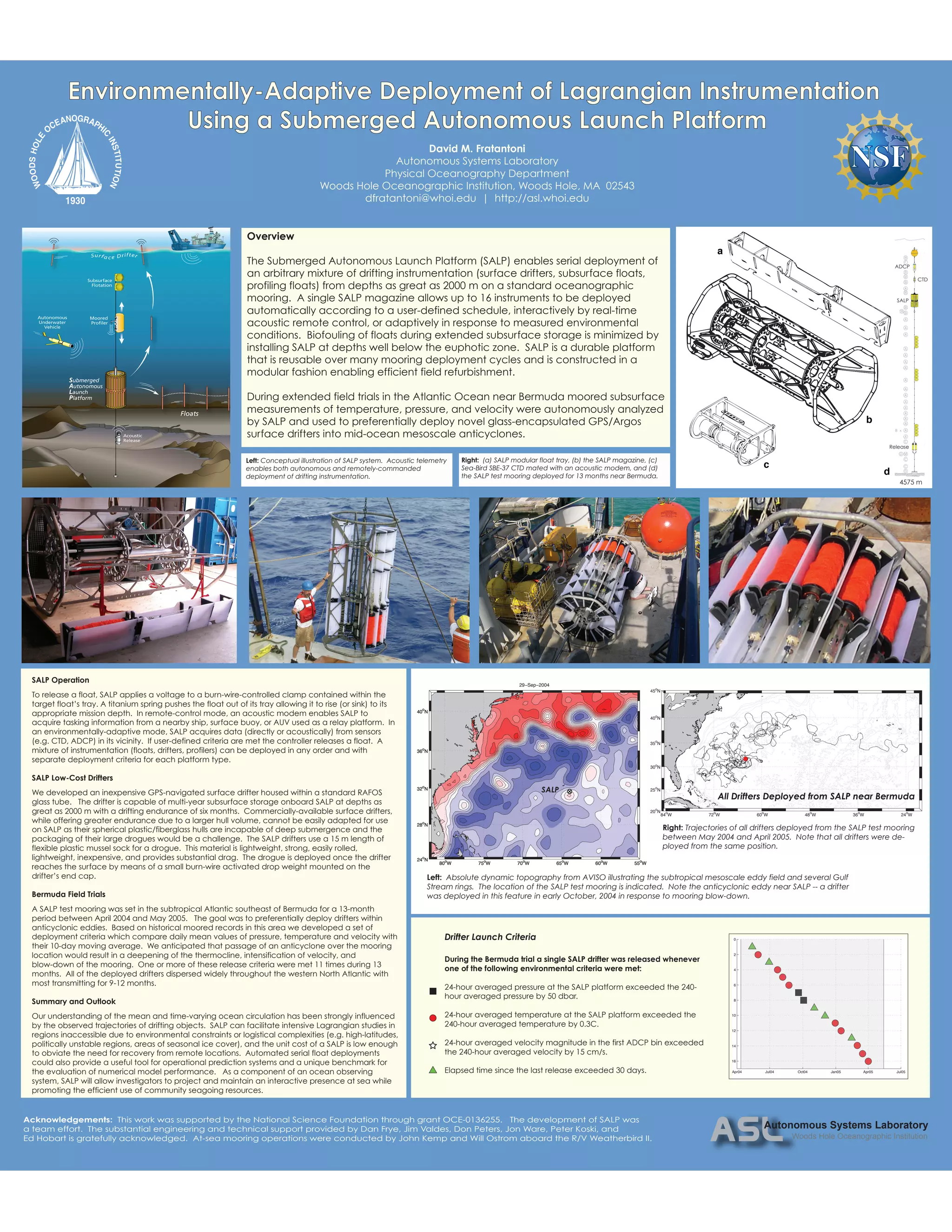

The Submerged Autonomous Launch Platform (SALP) facilitates the deployment of various oceanographic instruments from significant depths, allowing for adaptive releases based on real-time environmental data. Tested off the coast of Bermuda, SALP successfully deployed GPS/Argos surface drifters, significantly enhancing our capacity to study ocean circulation and mesoscale phenomena. The platform's modular design supports extended use and refurbishment, promoting efficient resource utilization in ocean observing systems.































































