An Eyes-Free Vision-Based UPC and MSI Barcode Localization and Decoding Algorithm for Mobile Phones
1.
An Eyes-Free Vision-BasedUPC and MSI Barcode Localization and Decoding
Algorithm for Mobile Phones
Aliasgar Kutiyanawala Vladimir Kulyukin
Computer Science Department
Utah State University
Logan, UT - 84322
1 Introduction
Supermarkets are one of the most functionally challenging environments for visually impaired (VI) users.
Accessible shopping systems can help VI individuals improve their quality of life by allowing them to shop
independently. We are working on an accessible shopping solution called ShopMobile [1, 2] that will allow VI
users to shop independently using only their cell phones. Most stores place MSI barcodes on shelves beneath
each product for inventory control purposes. Since each barcode is unique, it acts as a topological landmark that
can be used to localize the user in the store. Once the position of the user is known, verbal instructions can be
generated and issued to the user using text-to-speech synthesis that will lead her to the desired product. The
user can then pick up the desired product and scan the UPC barcode on it to verify that she had picked up the
correct product.
The current generation of smartphones are equipped with very good cameras and have powerful CPUs which
enable them to be used as portable barcode scanners. However, most existing systems like ZXing [3] and
RedLaser [4] can decode UPC barcodes but cannot decode MSI barcodes and require users to carefully align the
barcode in the center of the image. An accessible barcode scanning algorithm described in [5] does not impose
this restriction but is not implemented on a cell phone and cannot handle MSI barcodes. We present an eyes-free
barcode localization and decoding algorithm that allows VI users to recognize MSI barcodes on shelves and UPC
barcodes on packages.
2 Method
2.1 Interactive Camera Alignment
To keep the vision algorithms simple and efficient, we require that the barcode is always aligned with the camera
before taking a picture. Most products have UPC barcodes on the bottom of the package. To scan a barcode on a
package the user finds the bottom of the package, aligns the camera with the side of the package and starts the
interactive camera alignment loop by pressing a button on the screen. This causes the the current accelerometer
readings in the pitch and yaw planes to be stored as reference. The user can now move the phone away from the
surface of the package to take the picture. While the user is moving the phone, the accelerometer readings are
monitored continuously and if the user deviates from the reference readings in either the pitch or yaw planes,
specific haptic signals are sent until the camera is realigned with the package. The user stops moving the camera
away when the camera is approximately 10cm from the surface of the package and takes a picture by clicking a
button on the screen. This interactive camera alignment procedure ensures that the camera is always aligned
(parallel or perpendicular) to the barcode.
2.2 Barcode Localization Algorithm
The function of the barcode localization algorithm is to segment the barcode region from the image before
passing it to the barcode decoding algorithm. A barcode is characterized as an image region having two
properties – alternating frequency and vertical continuity. Alternating frequency is defined as number of zero-to-
one and one-to-zero transitions in a one pixel wide binarized bit string representation of an image. Vertical
continuity is defined it as the continuity of black and white lines along the y-axis. Consider two one-pixel wide
lines A and B placed over the barcode as shown in Figure 1. consider two one pixel wide lines A and B placed on
the barcode as shown in the left part of Figure 1. These lines can be encoded as bit strings where black pixels
map to zeros and white pixels map to ones. The alternating frequencies of the two lines can be found out by
counting the number of zero-to one and one-to-zero transitions in the bit strings. The vertical continuity can be
estimated as the length of the longest common subsequence between the two bit strings.
2.
Figure 2 showsan overview of the barcode localization algorithm. The image is first passed through a line filter
to filter out elements like graphics and text in the image. This filter is designed to let vertical lines in the image
pass through and filter everything else. The output of this filter will contain the barcode and some vertical lines
from other image elements. The filter output is then scanned rapidly in a rasterized fashion to score areas for
alternating frequency and vertical continuity. Fast histogram analysis is then used to isolate areas exhibiting high
alternating frequency and high vertical continuity. These areas represent candidate barcode regions and are sent
to the barcode decoding algorithm for decoding.
Figure 1. One Pixel Wide Lines on the Barcode.
Figure 2. Barcode Localization Algorithm.
2.3 Barcode Decoding Algorithm
The barcode decoding algorithm is responsible for decoding the barcode in the localized image. Our barcode
decoding algorithm is scanline based. The scanline based algorithm described in [6] uses Bayesian templates for
decoding barcodes and the one described in [7] uses deformable templates to decode barcodes. A scanline
represents a one-pixel wide slice of the image. It is analogous to drawing a line on the image and extracting the
pixels that lie below this line. The first step in our algorithm is to extract the data from the image along a scanline.
If the scanline is n-pixels long, this data can be represented by I = {i0, i1, …, in}, where ij represents the intensity or
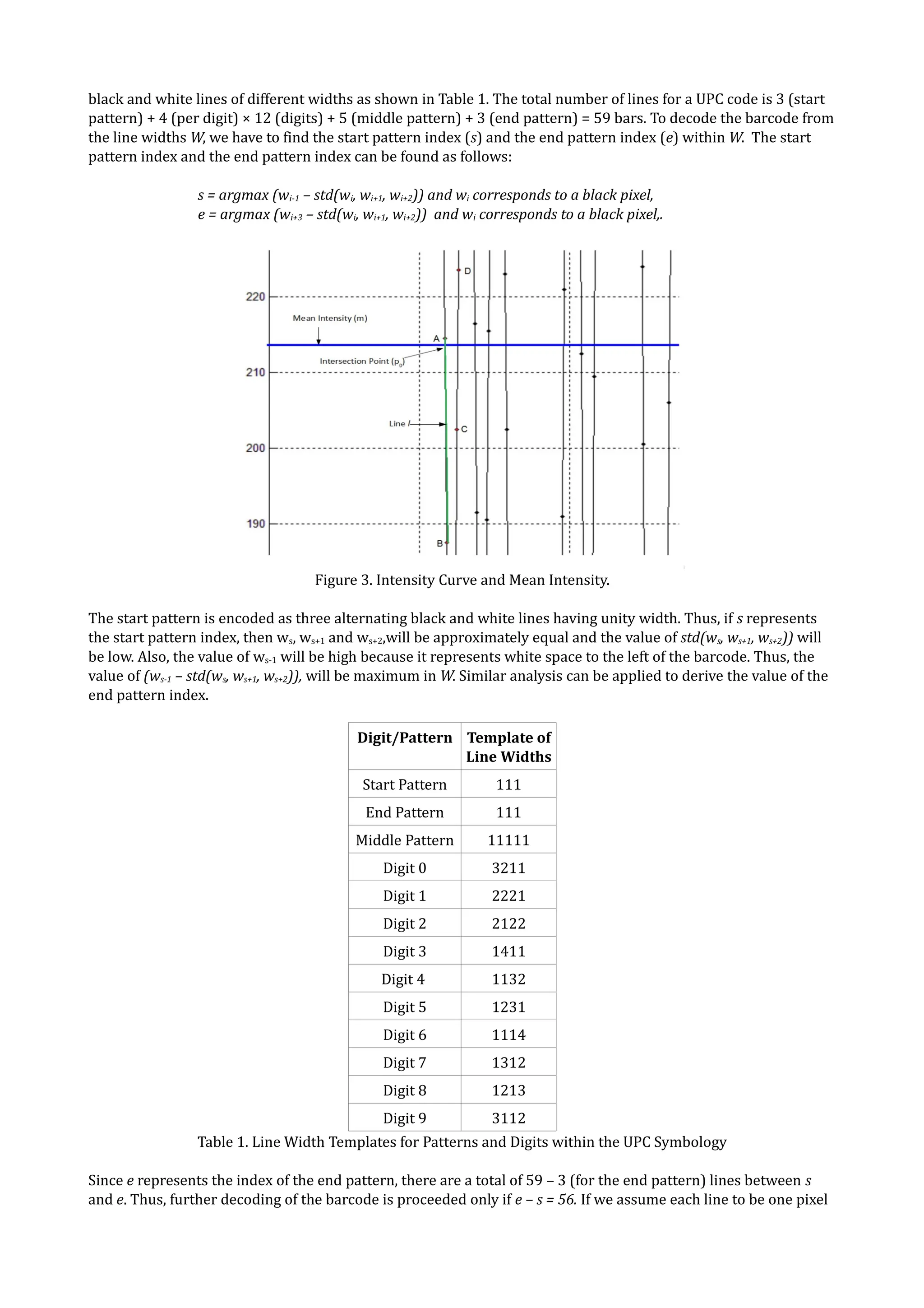
greyscale value of the jth pixel within the scanline and 0 ≤ ij ≤ 255. Figure 3 shows a graphical representation of a
part of the intensity curve I. Let us assume that the mean intensity along the scanline is m = mean(i0, i1, …, in).
Consider two points on the intensity curve that are on either side of m (points A and B in Figure 3) and construct
a line l that connects these two points. The intersection point p0 that represents the first intersection of curve I
with line m can now be estimated with sub-pixel accuracy within the scanline as the intersection of line l with
line m. The set of all the intersection points P = {p0, p1, …, pk+1} can be estimated in a similar fashion. The line
widths W = {w0, w1, …, wk} can now be computed as wi = pi+1 – pi.
2.3.1 Decoding UPC Barcodes
A UPC barcode [8] consists of 12 digits, arranged in two groups of six digits as follows: SDDDDDDMDDDDDDE,
where S represents the start pattern, M represents the middle pattern, E represents the end pattern and D
represents a digit. The start, middle and end patterns as well as each digit is encoded by a series of alternating
3.
black and whitelines of different widths as shown in Table 1. The total number of lines for a UPC code is 3 (start
pattern) + 4 (per digit) × 12 (digits) + 5 (middle pattern) + 3 (end pattern) = 59 bars. To decode the barcode from
the line widths W, we have to find the start pattern index (s) and the end pattern index (e) within W. The start
pattern index and the end pattern index can be found as follows:
s = argmax (wi-1 – std(wi, wi+1, wi+2)) and wi corresponds to a black pixel,
e = argmax (wi+3 – std(wi, wi+1, wi+2)) and wi corresponds to a black pixel,.
Figure 3. Intensity Curve and Mean Intensity.
The start pattern is encoded as three alternating black and white lines having unity width. Thus, if s represents
the start pattern index, then ws, ws+1 and ws+2,will be approximately equal and the value of std(ws, ws+1, ws+2)) will
be low. Also, the value of ws-1 will be high because it represents white space to the left of the barcode. Thus, the
value of (ws-1 – std(ws, ws+1, ws+2)), will be maximum in W. Similar analysis can be applied to derive the value of the
end pattern index.
Digit/Pattern Template of
Line Widths
Start Pattern 111
End Pattern 111
Middle Pattern 11111
Digit 0 3211
Digit 1 2221
Digit 2 2122
Digit 3 1411
Digit 4 1132
Digit 5 1231
Digit 6 1114
Digit 7 1312
Digit 8 1213
Digit 9 3112
Table 1. Line Width Templates for Patterns and Digits within the UPC Symbology
Since e represents the index of the end pattern, there are a total of 59 – 3 (for the end pattern) lines between s
and e. Thus, further decoding of the barcode is proceeded only if e – s = 56. If we assume each line to be one pixel
4.
wide, the sumof the widths for all the lines in the UPC code is 3 (start pattern) + 3 (end pattern) + 5 (middle
pattern) + 7 (per digit) × 12 (digits) = 95. The set of line widths W can now be normalized by dividing it by 95.
The index i of the jth digit dj in the width string can be easily calculated as follows:
i = s + (i – 1) × 4, if j ≤ 6 and
i = s + (i – 1) × 4 + 5, if j > 6 (add 5 lines for the middle pattern)
Since each digit is encoded by four lines, the value of the dj can now be found out as follows:
dj = argmin (Σ (wi+j – Tki+j)2)1/2, where 0 ≤ j < 4 and Tk represents the template of line widths for the jth digit as
described in Table 1.
The twelfth digit of the barcode represents the checksum of the preceding eleven digits and can be used to verify
if the barcode was correctly decoded or not.
2.3.1 Decoding MSI Barcodes
A MSI barcode [9] is a variable length barcode that is arranged as follows: SDD...DE, where S represents the start
pattern, D represents a digit and E represents the end pattern. Table 2 shows the encoding of the start and end
patterns as well as of digits 0 to 9 in the line widths format. The total number of lines in the barcode is equal to 2
(start pattern) + 3 (end pattern) + 8 (per digit) × n digits = 8n + 5.
To decode the barcode from the line widths W, we have to find the start pattern index (s) and the end pattern
index (e) within W. The start pattern index and the end pattern index can be found as follows:
s = argmax (wi-1 - (Σ (wi+j – Tsj)2)1/2), where wi corresponds to a black pixel and 0 ≤ j < 2
e = argmax (wi+3 - (Σ (wi+j – TEj)2)1/2), where wi corresponds to a black pixel and 0 ≤ j < 3
TS and TE represent the templates of line widths for the start and end patterns as described in Table 2.
Digit/Pattern Template of
Line Widths
Start Pattern 21
End Pattern 121
Digit 0 12121212
Digit 1 12121221
Digit 2 12122112
Digit 3 12122121
Digit 4 12211212
Digit 5 12211221
Digit 6 12212112
Digit 7 12212121
Digit 8 21121212
Digit 9 21121221
Table 2. Line Width Templates for Patterns and Digits within the MSI Symbology
Since e represents the index of the end pattern, there are a total of 8n + 5 – 3 (for the end pattern) lines between
s and e. Thus, further decoding of the barcode is proceeded only if e – s = 8n + 2. If we assume that each line in the
barcode is one pixel wide, the total width of each digit is 12 pixels. Thus, the total width of the barcode is 3 (start
pattern) + 4 (end pattern) + 12 × n (for n digits in the barcode) = 12n + 7 pixels.. The set of line widths W can
now be normalized by dividing it by 12n + 7 (Assuming we know the value of n).
The index i of the jth digit dj in the width string can be easily calculated as follows:
5.
i = s+ (i – 1) × 8
Since each digit is encoded by eight lines, the value of the dj can now be found out as follows:
dj = argmin (Σ (wi+j – Tki+j)2)1/2, where 0 ≤ j < 8 and Tk represents the template of line widths for the jth digit as
described in Table 2.
The last digit of the barcode represents the checksum of the preceding eleven digits and can be used to verify if
the barcode was correctly decoded or not. A modulo 10 checksum is most commonly used and it can be
computed by the Luhn algorithm [10].
The above procedure shows how a scanline is decoded in the image. In practice, multiple scanlines are generated
until a valid barcode is obtained. If a valid barcode is not obtained even after N scanlines have been decoded, it is
assumed that the barcode may be perpendicular to the image. The original picture from the camera is rotated by
90 degrees once again subjected to the entire procedure of barcode localization and decoding.
3 Conclusion
We have developed an eyes-free barcode scanning solution that can decode MSI barcodes on shelves and UPC
barcodes on products.
References
[1] Kulyukin, V., and Kutiyanawala, A., Eyes-Free Barcode Localization and Decoding for Visually Impaired Mobile
Phone Users. Proceedings of the 2010 International Conference on Image Processing, Computer Vision, & Pattern
Recognition (IPCV 2010), July 12-15, 2010, Las Vegas, NV.
[2] Kulyukin, V., and Kutiyanawala, A., From ShopTalk to ShopMobile: Vision-Based Barcode Scanning with Mobile
Phones for Independent Blind Grocery Shopping. Proceedings of the 2010 Rehabilitation Engineering and
Assistive Technology Society of North America Conference (RESNA 2010), Las Vegas, NV.
[3] The Zebra Crossing Barcode Decoding Library
http://code.google.com/p/zxing/
[4] Occipital, LLC. RedLaser
http://redlaser.com/
[5] Tekin, E. and Coughlan, J.M., An algorithm enabling blind users to find and read barcodes WACV09, 2009
[6] Tekin, E. and Coughlan, J.M., A Bayesian Algorithm for Reading 1D Barcodes, Proceedings of the 2009
Canadian Conference on Computer and Robot Vision , 2009
[7] Gallo, O. and Manduchi, R., Reading Challenging Barcodes with Cameras, Winter Vision Meetings, Workshop
on Applications of Computer Vision, 2009
[8] Wikipedia, UPC barcode
http://en.wikipedia.org/wiki/Universal_Product_Code
[9] Wikipedia, MSI barcode
http://en.wikipedia.org/wiki/MSI_Barcode
[10] Wikipedia, Luhn algorithm
http://en.wikipedia.org/wiki/Luhn_algorithm
![An Eyes-Free Vision-Based UPC and MSI Barcode Localization and Decoding
Algorithm for Mobile Phones
Aliasgar Kutiyanawala Vladimir Kulyukin
Computer Science Department
Utah State University
Logan, UT - 84322
1 Introduction
Supermarkets are one of the most functionally challenging environments for visually impaired (VI) users.
Accessible shopping systems can help VI individuals improve their quality of life by allowing them to shop
independently. We are working on an accessible shopping solution called ShopMobile [1, 2] that will allow VI
users to shop independently using only their cell phones. Most stores place MSI barcodes on shelves beneath
each product for inventory control purposes. Since each barcode is unique, it acts as a topological landmark that
can be used to localize the user in the store. Once the position of the user is known, verbal instructions can be
generated and issued to the user using text-to-speech synthesis that will lead her to the desired product. The
user can then pick up the desired product and scan the UPC barcode on it to verify that she had picked up the
correct product.
The current generation of smartphones are equipped with very good cameras and have powerful CPUs which
enable them to be used as portable barcode scanners. However, most existing systems like ZXing [3] and
RedLaser [4] can decode UPC barcodes but cannot decode MSI barcodes and require users to carefully align the
barcode in the center of the image. An accessible barcode scanning algorithm described in [5] does not impose
this restriction but is not implemented on a cell phone and cannot handle MSI barcodes. We present an eyes-free
barcode localization and decoding algorithm that allows VI users to recognize MSI barcodes on shelves and UPC
barcodes on packages.
2 Method
2.1 Interactive Camera Alignment
To keep the vision algorithms simple and efficient, we require that the barcode is always aligned with the camera
before taking a picture. Most products have UPC barcodes on the bottom of the package. To scan a barcode on a
package the user finds the bottom of the package, aligns the camera with the side of the package and starts the
interactive camera alignment loop by pressing a button on the screen. This causes the the current accelerometer
readings in the pitch and yaw planes to be stored as reference. The user can now move the phone away from the
surface of the package to take the picture. While the user is moving the phone, the accelerometer readings are
monitored continuously and if the user deviates from the reference readings in either the pitch or yaw planes,
specific haptic signals are sent until the camera is realigned with the package. The user stops moving the camera
away when the camera is approximately 10cm from the surface of the package and takes a picture by clicking a
button on the screen. This interactive camera alignment procedure ensures that the camera is always aligned
(parallel or perpendicular) to the barcode.
2.2 Barcode Localization Algorithm
The function of the barcode localization algorithm is to segment the barcode region from the image before
passing it to the barcode decoding algorithm. A barcode is characterized as an image region having two
properties – alternating frequency and vertical continuity. Alternating frequency is defined as number of zero-to-
one and one-to-zero transitions in a one pixel wide binarized bit string representation of an image. Vertical
continuity is defined it as the continuity of black and white lines along the y-axis. Consider two one-pixel wide
lines A and B placed over the barcode as shown in Figure 1. consider two one pixel wide lines A and B placed on
the barcode as shown in the left part of Figure 1. These lines can be encoded as bit strings where black pixels
map to zeros and white pixels map to ones. The alternating frequencies of the two lines can be found out by
counting the number of zero-to one and one-to-zero transitions in the bit strings. The vertical continuity can be
estimated as the length of the longest common subsequence between the two bit strings.](https://image.slidesharecdn.com/eyesfreevisionbasedupcmsienvision2010-111221130509-phpapp02/75/An-Eyes-Free-Vision-Based-UPC-and-MSI-Barcode-Localization-and-Decoding-Algorithm-for-Mobile-Phones-1-2048.jpg)
![Figure 2 shows an overview of the barcode localization algorithm. The image is first passed through a line filter
to filter out elements like graphics and text in the image. This filter is designed to let vertical lines in the image
pass through and filter everything else. The output of this filter will contain the barcode and some vertical lines
from other image elements. The filter output is then scanned rapidly in a rasterized fashion to score areas for
alternating frequency and vertical continuity. Fast histogram analysis is then used to isolate areas exhibiting high
alternating frequency and high vertical continuity. These areas represent candidate barcode regions and are sent
to the barcode decoding algorithm for decoding.
Figure 1. One Pixel Wide Lines on the Barcode.
Figure 2. Barcode Localization Algorithm.
2.3 Barcode Decoding Algorithm
The barcode decoding algorithm is responsible for decoding the barcode in the localized image. Our barcode
decoding algorithm is scanline based. The scanline based algorithm described in [6] uses Bayesian templates for
decoding barcodes and the one described in [7] uses deformable templates to decode barcodes. A scanline
represents a one-pixel wide slice of the image. It is analogous to drawing a line on the image and extracting the
pixels that lie below this line. The first step in our algorithm is to extract the data from the image along a scanline.
If the scanline is n-pixels long, this data can be represented by I = {i0, i1, …, in}, where ij represents the intensity or
greyscale value of the jth pixel within the scanline and 0 ≤ ij ≤ 255. Figure 3 shows a graphical representation of a
part of the intensity curve I. Let us assume that the mean intensity along the scanline is m = mean(i0, i1, …, in).
Consider two points on the intensity curve that are on either side of m (points A and B in Figure 3) and construct
a line l that connects these two points. The intersection point p0 that represents the first intersection of curve I
with line m can now be estimated with sub-pixel accuracy within the scanline as the intersection of line l with
line m. The set of all the intersection points P = {p0, p1, …, pk+1} can be estimated in a similar fashion. The line
widths W = {w0, w1, …, wk} can now be computed as wi = pi+1 – pi.
2.3.1 Decoding UPC Barcodes
A UPC barcode [8] consists of 12 digits, arranged in two groups of six digits as follows: SDDDDDDMDDDDDDE,
where S represents the start pattern, M represents the middle pattern, E represents the end pattern and D
represents a digit. The start, middle and end patterns as well as each digit is encoded by a series of alternating](https://image.slidesharecdn.com/eyesfreevisionbasedupcmsienvision2010-111221130509-phpapp02/75/An-Eyes-Free-Vision-Based-UPC-and-MSI-Barcode-Localization-and-Decoding-Algorithm-for-Mobile-Phones-2-2048.jpg)
![wide, the sum of the widths for all the lines in the UPC code is 3 (start pattern) + 3 (end pattern) + 5 (middle
pattern) + 7 (per digit) × 12 (digits) = 95. The set of line widths W can now be normalized by dividing it by 95.
The index i of the jth digit dj in the width string can be easily calculated as follows:
i = s + (i – 1) × 4, if j ≤ 6 and
i = s + (i – 1) × 4 + 5, if j > 6 (add 5 lines for the middle pattern)
Since each digit is encoded by four lines, the value of the dj can now be found out as follows:
dj = argmin (Σ (wi+j – Tki+j)2)1/2, where 0 ≤ j < 4 and Tk represents the template of line widths for the jth digit as
described in Table 1.
The twelfth digit of the barcode represents the checksum of the preceding eleven digits and can be used to verify
if the barcode was correctly decoded or not.
2.3.1 Decoding MSI Barcodes
A MSI barcode [9] is a variable length barcode that is arranged as follows: SDD...DE, where S represents the start
pattern, D represents a digit and E represents the end pattern. Table 2 shows the encoding of the start and end
patterns as well as of digits 0 to 9 in the line widths format. The total number of lines in the barcode is equal to 2
(start pattern) + 3 (end pattern) + 8 (per digit) × n digits = 8n + 5.
To decode the barcode from the line widths W, we have to find the start pattern index (s) and the end pattern
index (e) within W. The start pattern index and the end pattern index can be found as follows:
s = argmax (wi-1 - (Σ (wi+j – Tsj)2)1/2), where wi corresponds to a black pixel and 0 ≤ j < 2
e = argmax (wi+3 - (Σ (wi+j – TEj)2)1/2), where wi corresponds to a black pixel and 0 ≤ j < 3
TS and TE represent the templates of line widths for the start and end patterns as described in Table 2.
Digit/Pattern Template of
Line Widths
Start Pattern 21
End Pattern 121
Digit 0 12121212
Digit 1 12121221
Digit 2 12122112
Digit 3 12122121
Digit 4 12211212
Digit 5 12211221
Digit 6 12212112
Digit 7 12212121
Digit 8 21121212
Digit 9 21121221
Table 2. Line Width Templates for Patterns and Digits within the MSI Symbology
Since e represents the index of the end pattern, there are a total of 8n + 5 – 3 (for the end pattern) lines between
s and e. Thus, further decoding of the barcode is proceeded only if e – s = 8n + 2. If we assume that each line in the
barcode is one pixel wide, the total width of each digit is 12 pixels. Thus, the total width of the barcode is 3 (start
pattern) + 4 (end pattern) + 12 × n (for n digits in the barcode) = 12n + 7 pixels.. The set of line widths W can
now be normalized by dividing it by 12n + 7 (Assuming we know the value of n).
The index i of the jth digit dj in the width string can be easily calculated as follows:](https://image.slidesharecdn.com/eyesfreevisionbasedupcmsienvision2010-111221130509-phpapp02/75/An-Eyes-Free-Vision-Based-UPC-and-MSI-Barcode-Localization-and-Decoding-Algorithm-for-Mobile-Phones-4-2048.jpg)
![i = s + (i – 1) × 8
Since each digit is encoded by eight lines, the value of the dj can now be found out as follows:
dj = argmin (Σ (wi+j – Tki+j)2)1/2, where 0 ≤ j < 8 and Tk represents the template of line widths for the jth digit as
described in Table 2.
The last digit of the barcode represents the checksum of the preceding eleven digits and can be used to verify if
the barcode was correctly decoded or not. A modulo 10 checksum is most commonly used and it can be
computed by the Luhn algorithm [10].
The above procedure shows how a scanline is decoded in the image. In practice, multiple scanlines are generated
until a valid barcode is obtained. If a valid barcode is not obtained even after N scanlines have been decoded, it is
assumed that the barcode may be perpendicular to the image. The original picture from the camera is rotated by
90 degrees once again subjected to the entire procedure of barcode localization and decoding.
3 Conclusion
We have developed an eyes-free barcode scanning solution that can decode MSI barcodes on shelves and UPC
barcodes on products.
References
[1] Kulyukin, V., and Kutiyanawala, A., Eyes-Free Barcode Localization and Decoding for Visually Impaired Mobile
Phone Users. Proceedings of the 2010 International Conference on Image Processing, Computer Vision, & Pattern
Recognition (IPCV 2010), July 12-15, 2010, Las Vegas, NV.
[2] Kulyukin, V., and Kutiyanawala, A., From ShopTalk to ShopMobile: Vision-Based Barcode Scanning with Mobile
Phones for Independent Blind Grocery Shopping. Proceedings of the 2010 Rehabilitation Engineering and
Assistive Technology Society of North America Conference (RESNA 2010), Las Vegas, NV.
[3] The Zebra Crossing Barcode Decoding Library
http://code.google.com/p/zxing/
[4] Occipital, LLC. RedLaser
http://redlaser.com/
[5] Tekin, E. and Coughlan, J.M., An algorithm enabling blind users to find and read barcodes WACV09, 2009
[6] Tekin, E. and Coughlan, J.M., A Bayesian Algorithm for Reading 1D Barcodes, Proceedings of the 2009
Canadian Conference on Computer and Robot Vision , 2009
[7] Gallo, O. and Manduchi, R., Reading Challenging Barcodes with Cameras, Winter Vision Meetings, Workshop
on Applications of Computer Vision, 2009
[8] Wikipedia, UPC barcode
http://en.wikipedia.org/wiki/Universal_Product_Code
[9] Wikipedia, MSI barcode
http://en.wikipedia.org/wiki/MSI_Barcode
[10] Wikipedia, Luhn algorithm
http://en.wikipedia.org/wiki/Luhn_algorithm](https://image.slidesharecdn.com/eyesfreevisionbasedupcmsienvision2010-111221130509-phpapp02/75/An-Eyes-Free-Vision-Based-UPC-and-MSI-Barcode-Localization-and-Decoding-Algorithm-for-Mobile-Phones-5-2048.jpg)



































































