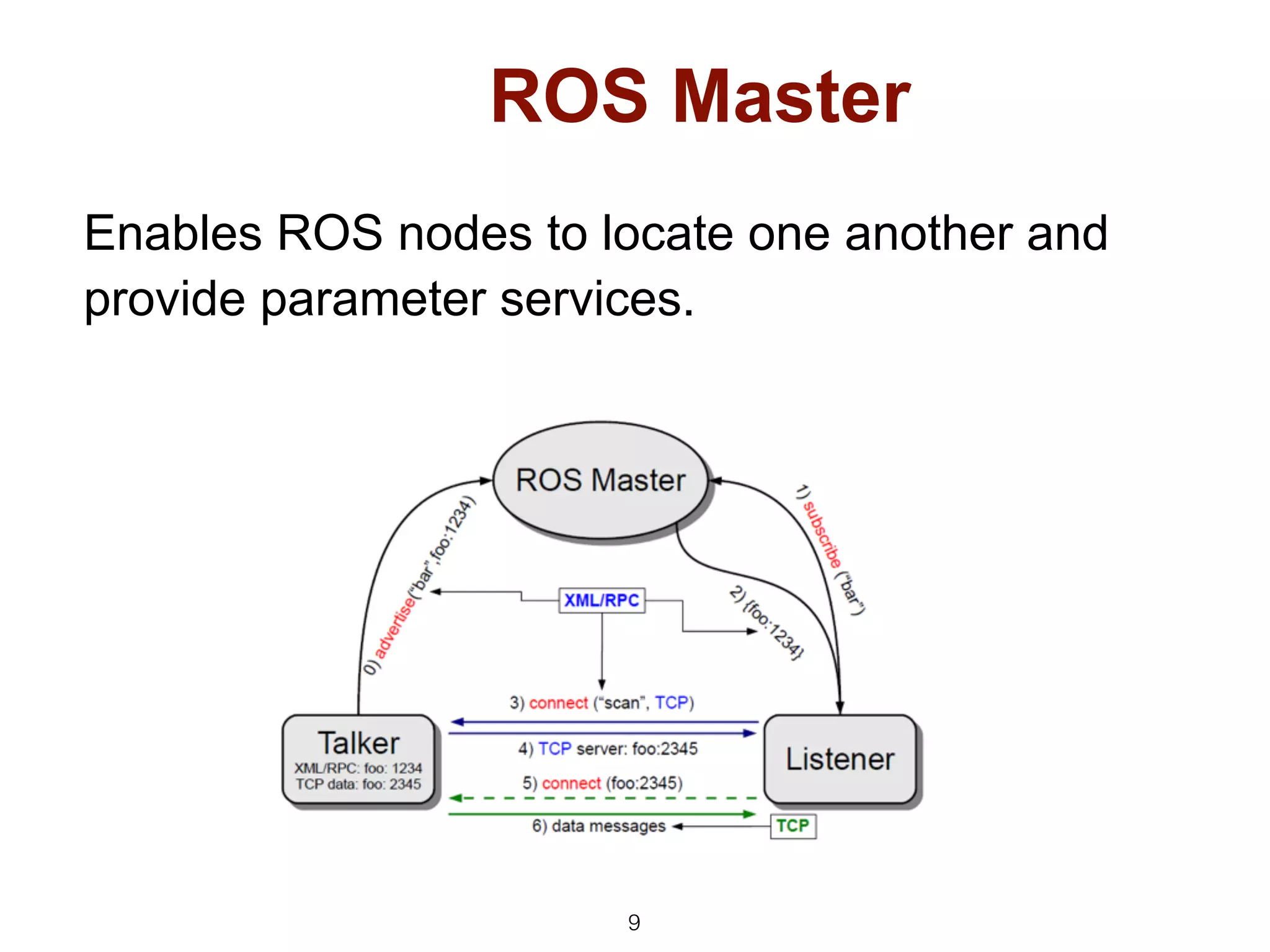
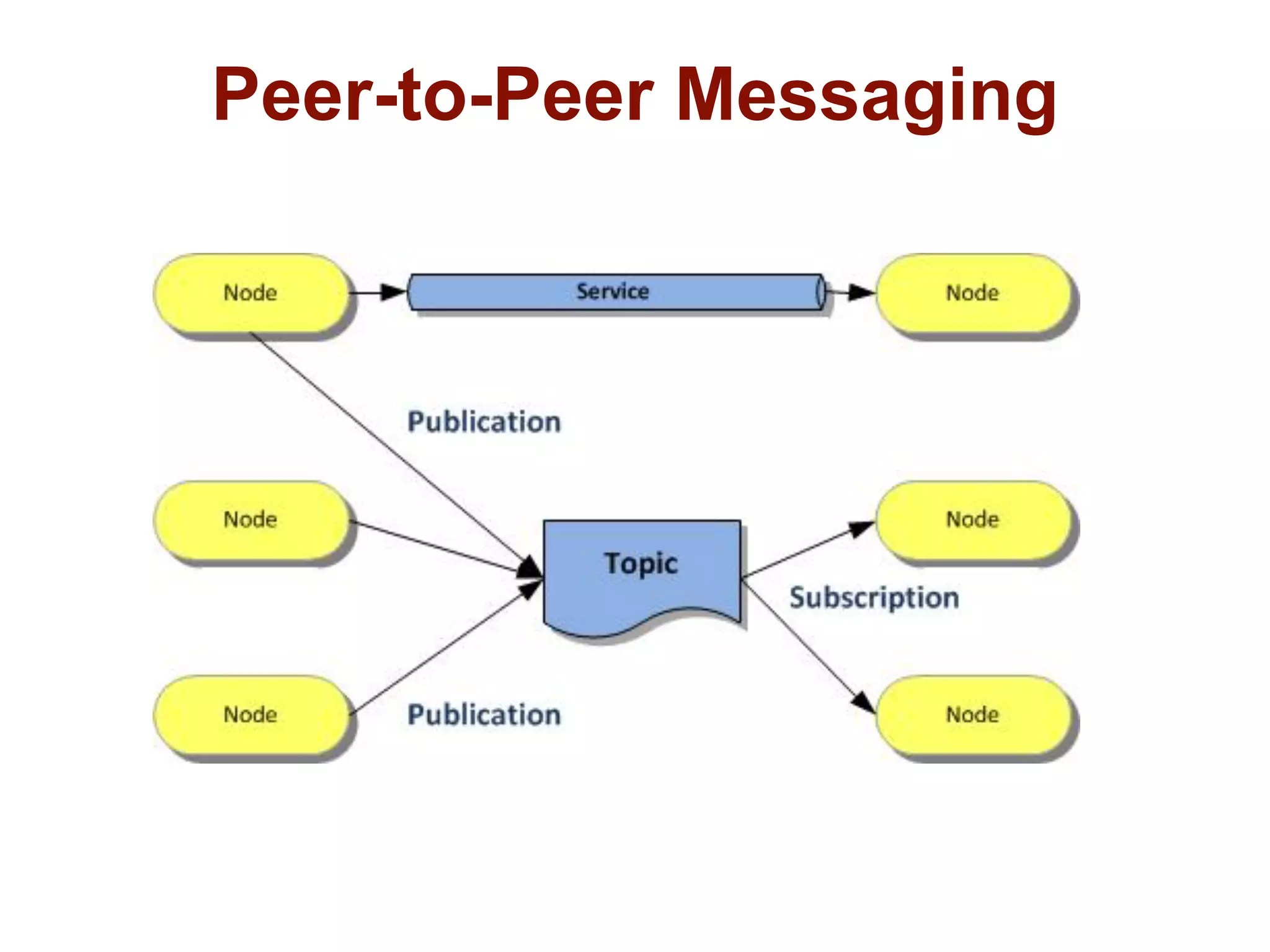
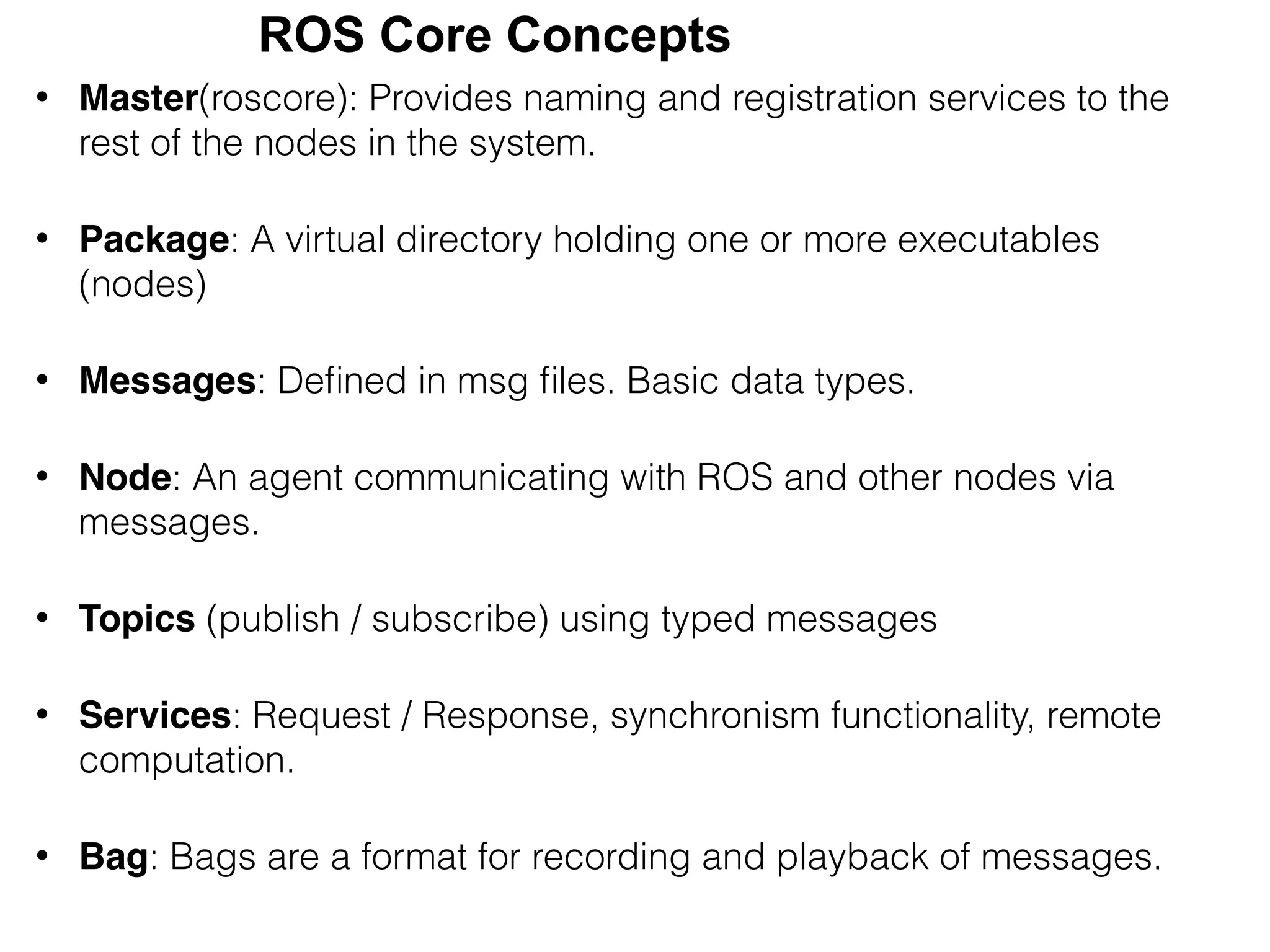
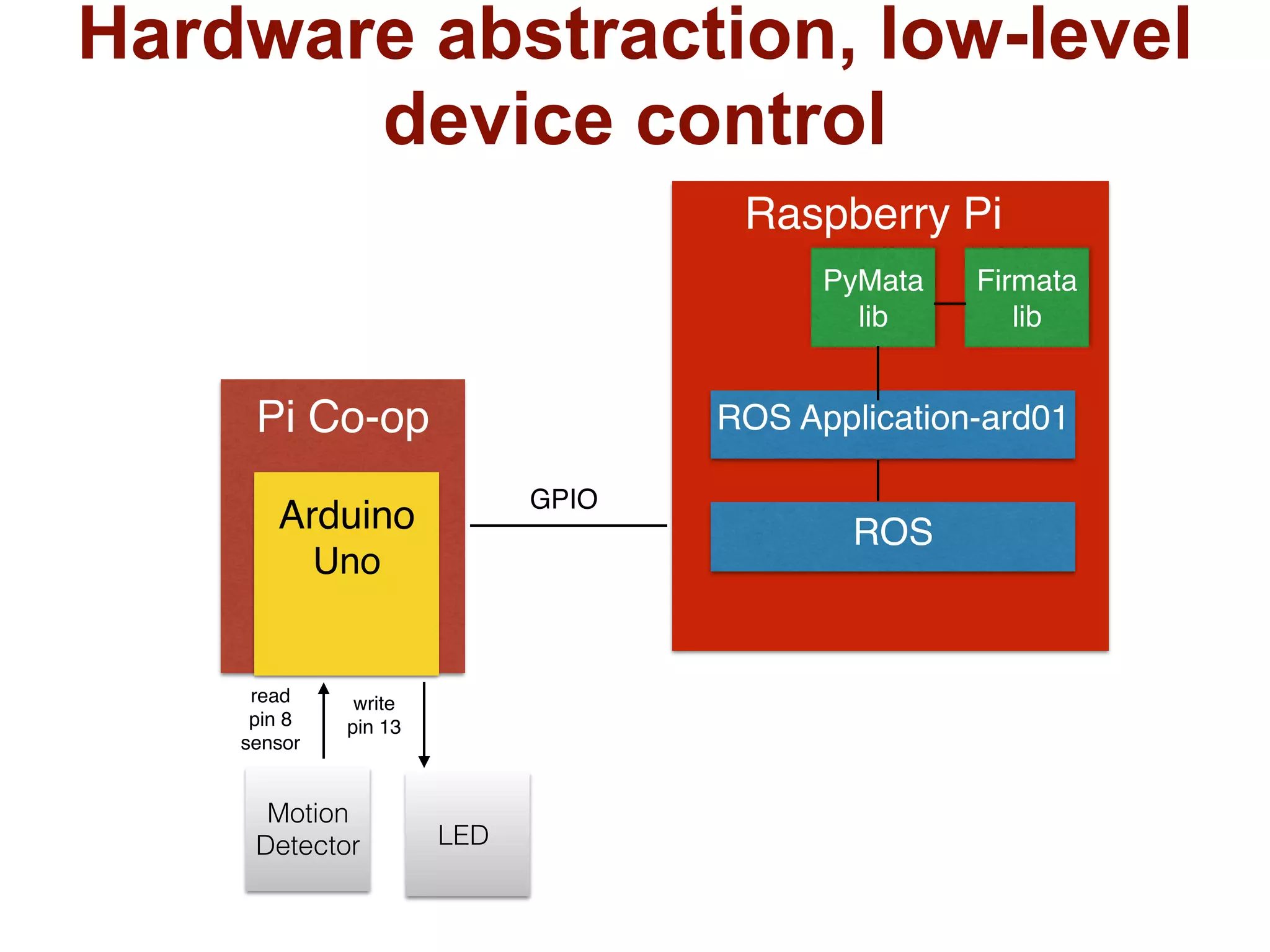
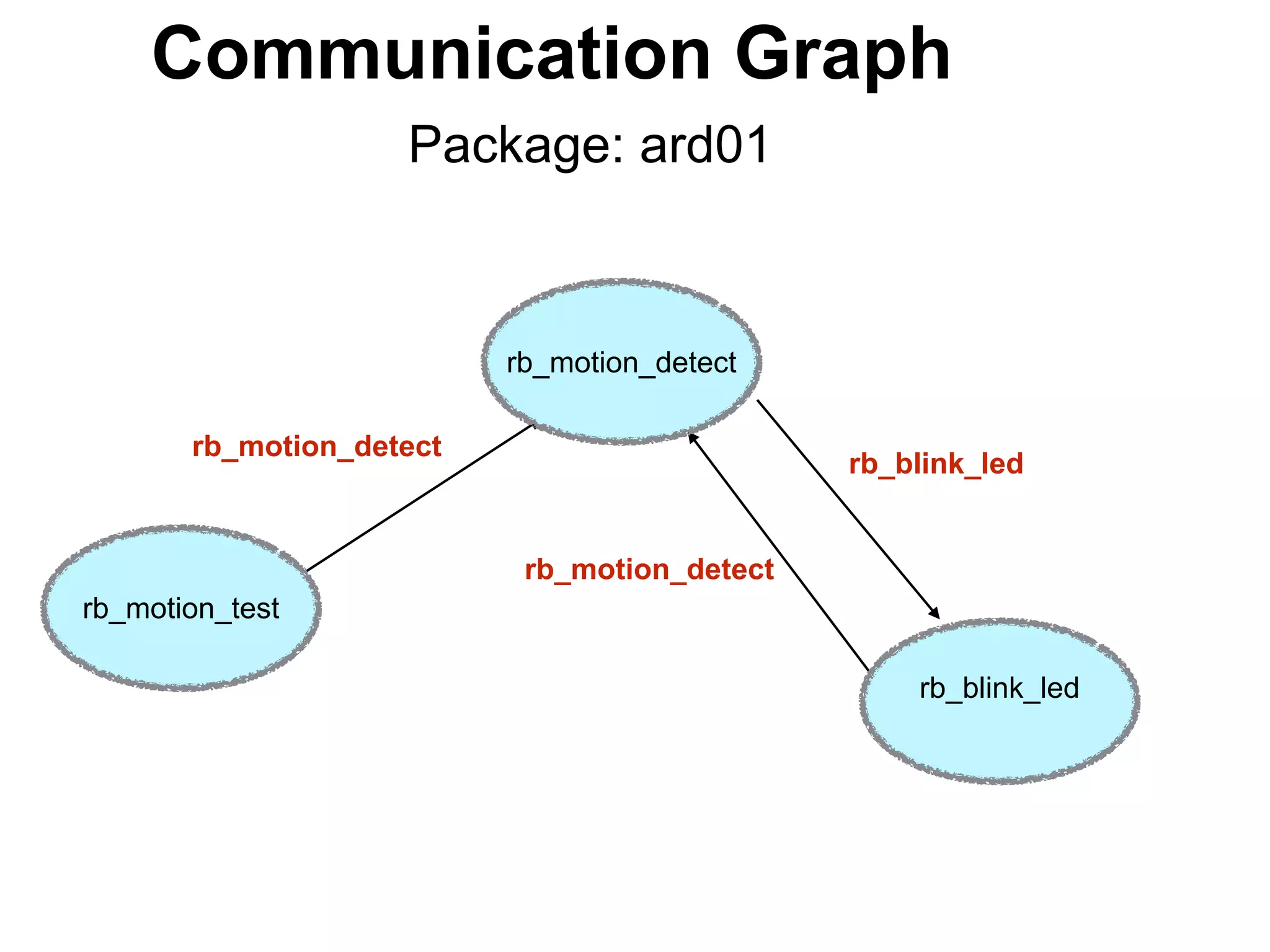
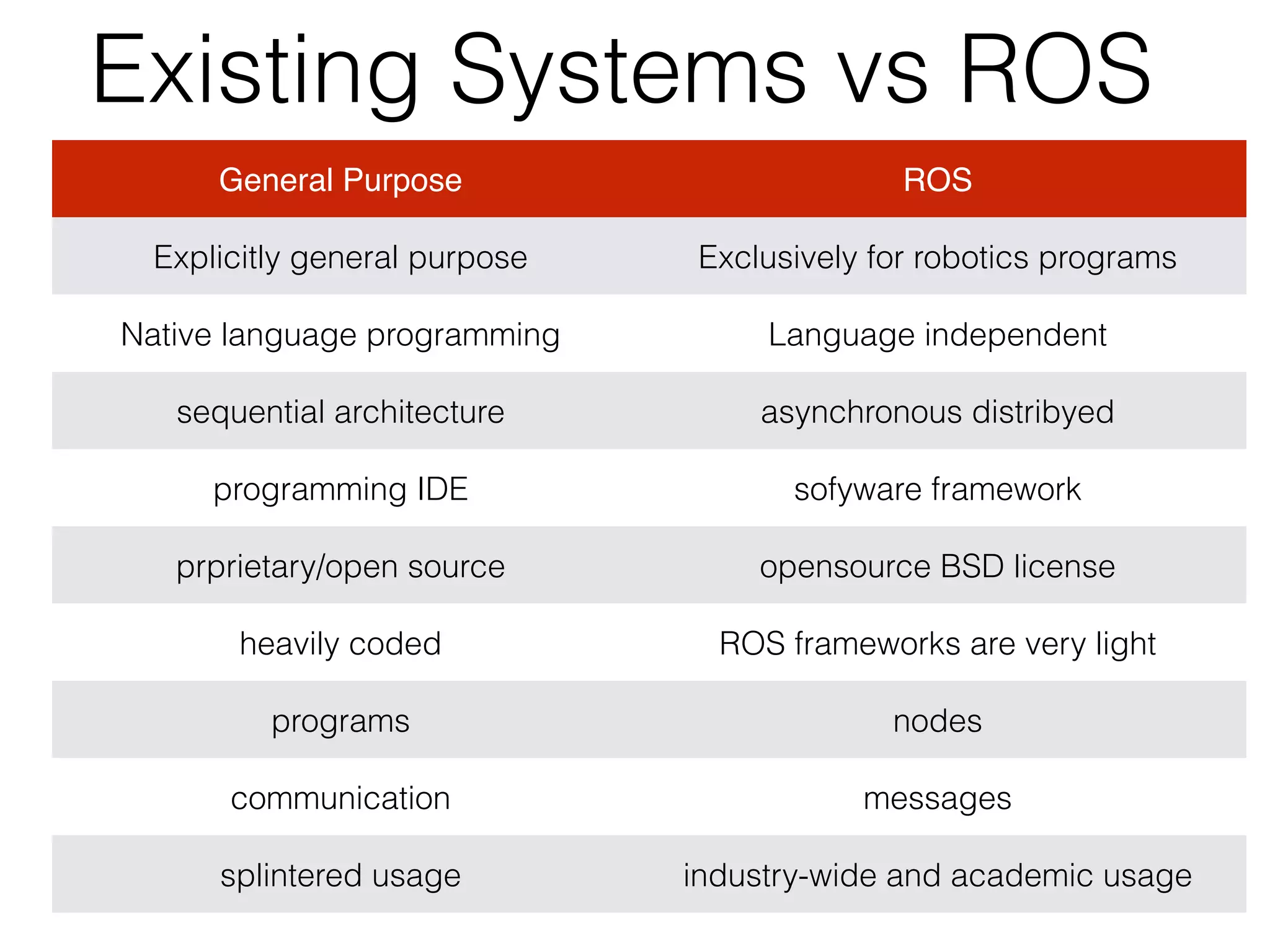
The document provides an overview of using ROS (Robot Operating System) with the Raspberry Pi for developing robotic systems, highlighting its architecture and functionalities. It covers installation, creating applications, and connecting components like Arduino for motion detection and control. The conclusion emphasizes ROS's viability for robotics education at advanced levels due to its widespread industry and academic usage.
![Execution
Terminal session 1 Roscore
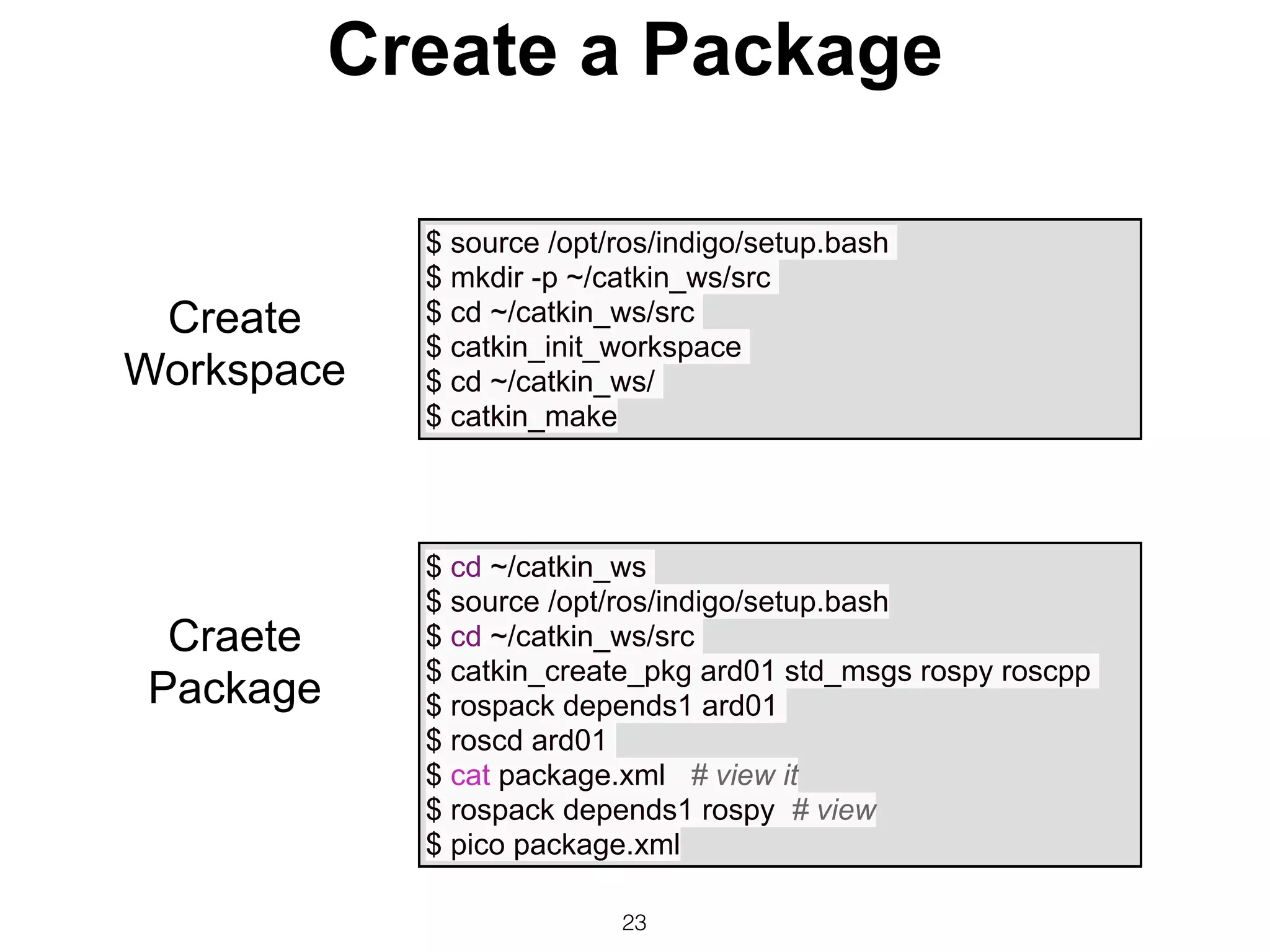
pi@raspberrypi ~ $ cd ~/catkin_ws
pi@raspberrypi ~/catkin_ws $ source ./devel/setup.bash
pi@raspberrypi ~/catkin_ws $ roscore
... logging to /home/pi/.ros/log/c4b68850-6434-11e4-a4b6-b827eb6d59e5/roslaunch-
raspberrypi-2639.log
pi@raspberrypi ~/catkin_ws $ rosrun ard01 rb_motion_test.py
Enter start/stop/exit motion detection:start
[INFO] [WallTime: 1415119214.484039] motion_detect mode requested -start
Enter start/stop/exit motion detection:
blepi@raspberrypi ~/catkin_ws $ rosrun ard01 rb_motion_detect.py
[INFO] [WallTime: 1415119214.521525] Message is start
Terminal session 3 rb_motion_detect
^Cpi@raspberrypi ~/catkin_ws $ rosrun ard01 rb_blink_led.py
[INFO] [WallTime: 1415119236.277651] Message is 1 5
[INFO] [WallTime: 1415119236.290445] Requested blink rate is 1, 5
Opening Arduino Serial port /dev/ttyS0
Please wait while Arduino is being detected. This can take up to 5 seconds ...
Board initialized in 0 seconds
Total Number of Pins Detected = 20
Total Number of Analog Pins Detected = 6
PyMata close(): Calling sys.exit(0): Hope to see you soon!
Terminal session 2 rb_motion_test
Terminal session 3 rb_blink_led](https://image.slidesharecdn.com/roboticsandros-141224122252-conversion-gate02/75/Raspberry-Pi-ROS-29-2048.jpg)


























































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)



