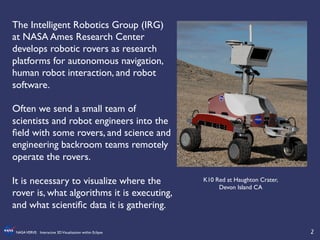
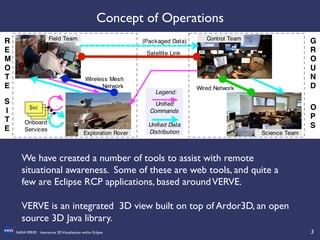
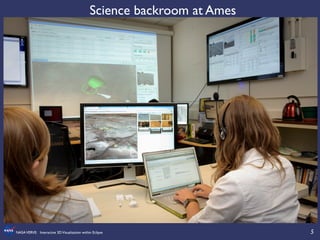
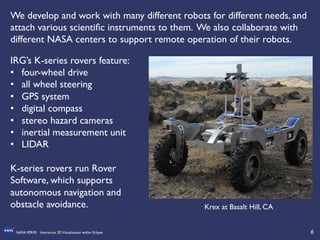
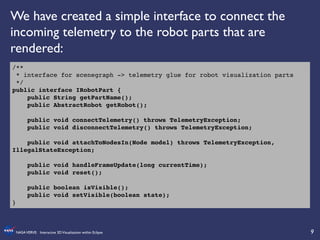
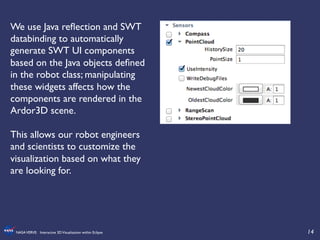
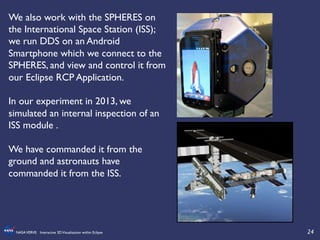
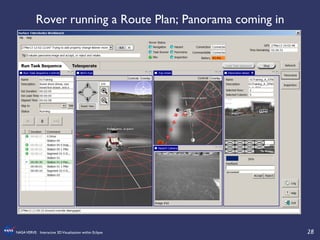
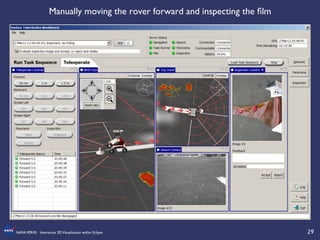
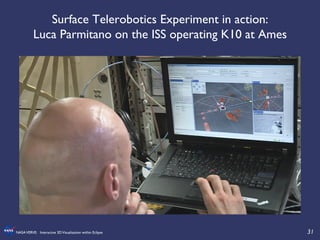
NASA's Intelligent Robotics Group developed NASAVERVE, an interactive 3D visualization tool within the Eclipse IDE. NASAVERVE allows scientists and engineers to remotely visualize rover locations, sensor data, and terrain maps in 3D during field experiments. It integrates the Ardor3D 3D library with the Eclipse RCP framework. NASA uses NASAVERVE to remotely operate rovers on the International Space Station and at sites like Mars, providing situational awareness to distributed teams.



![22
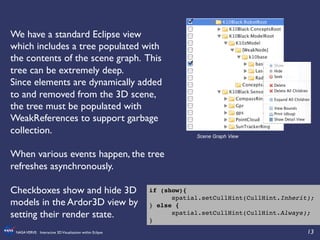
NASAVERVE: Interactive 3DVisualization within Eclipse
!
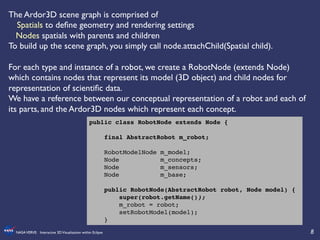
public void handleFrameUpdate(long currentTime) {!
if(isDirty()) {!
try {!
float[] ja = m_angleData;!
JointInfo joint;!
for(int i = 0; i < m_joints.length; i++) {!
if(i < m_angleData.length) {!
joint = m_joints[i];!
if( joint.spatial != null && !Float.isNaN(ja[i]) ) {!
m_rot.fromAngleNormalAxis(ja[i]+joint.offset,
! ! ! ! ! ! !joint.rotAxis);!
joint.spatial.setRotation(m_rot);!
}!
}!
}!
}!
catch(Throwable t) {!
logger.log(t);!
}!
setDirty(false);!
}!
}!
Sample handleFrameUpdate for joint data](https://image.slidesharecdn.com/nasaverveeclipsecon14-140319170830-phpapp01/85/NASA-VERVE-Interactive-3D-Visualization-within-Eclipse-22-320.jpg)








![codin9cafe[2015.01.29]Interactive 3D graphics - 박희수](https://cdn.slidesharecdn.com/ss_thumbnails/interactive3dgraphics-160712052539-thumbnail.jpg?width=640&height=640&fit=bounds)