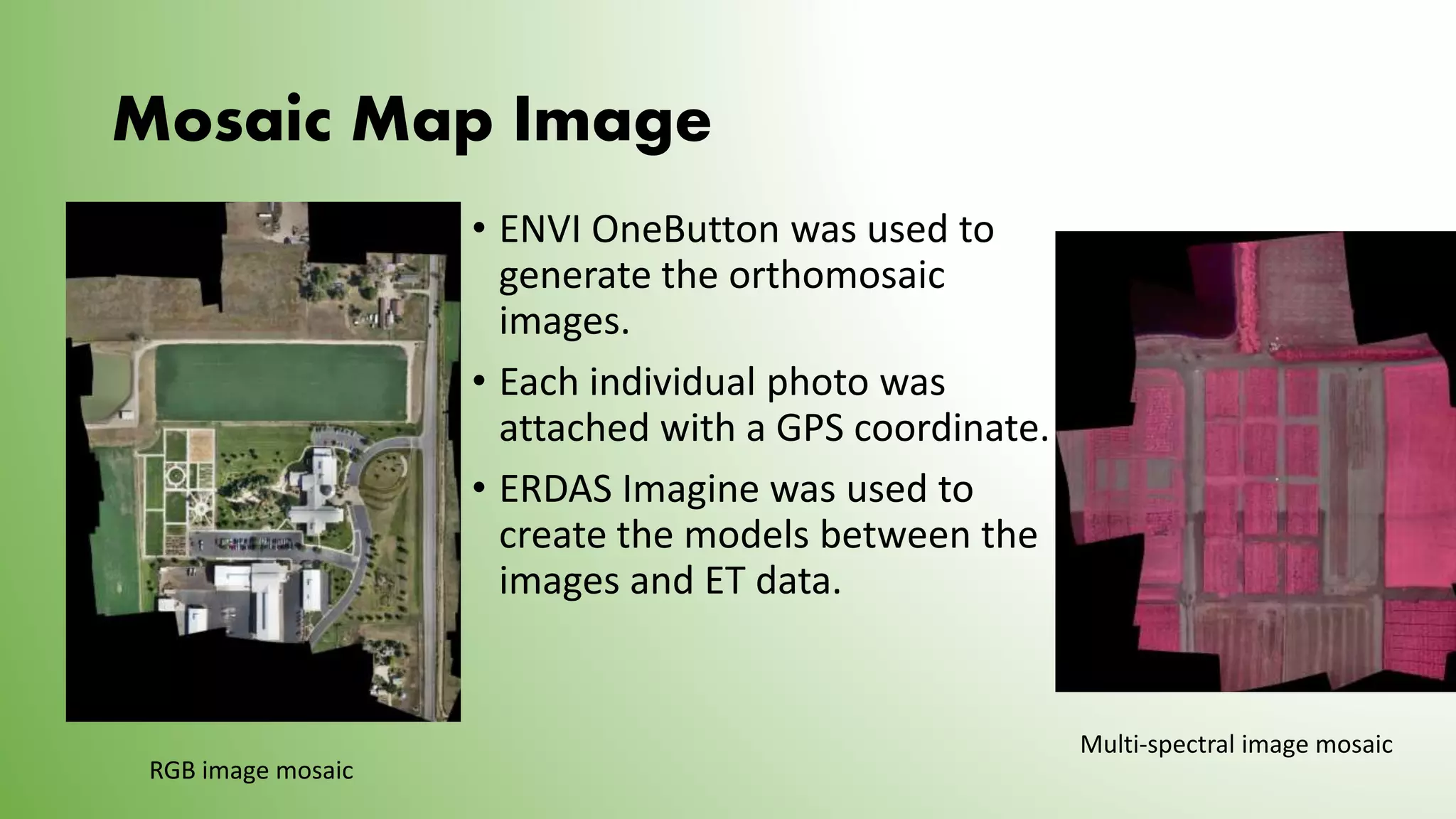
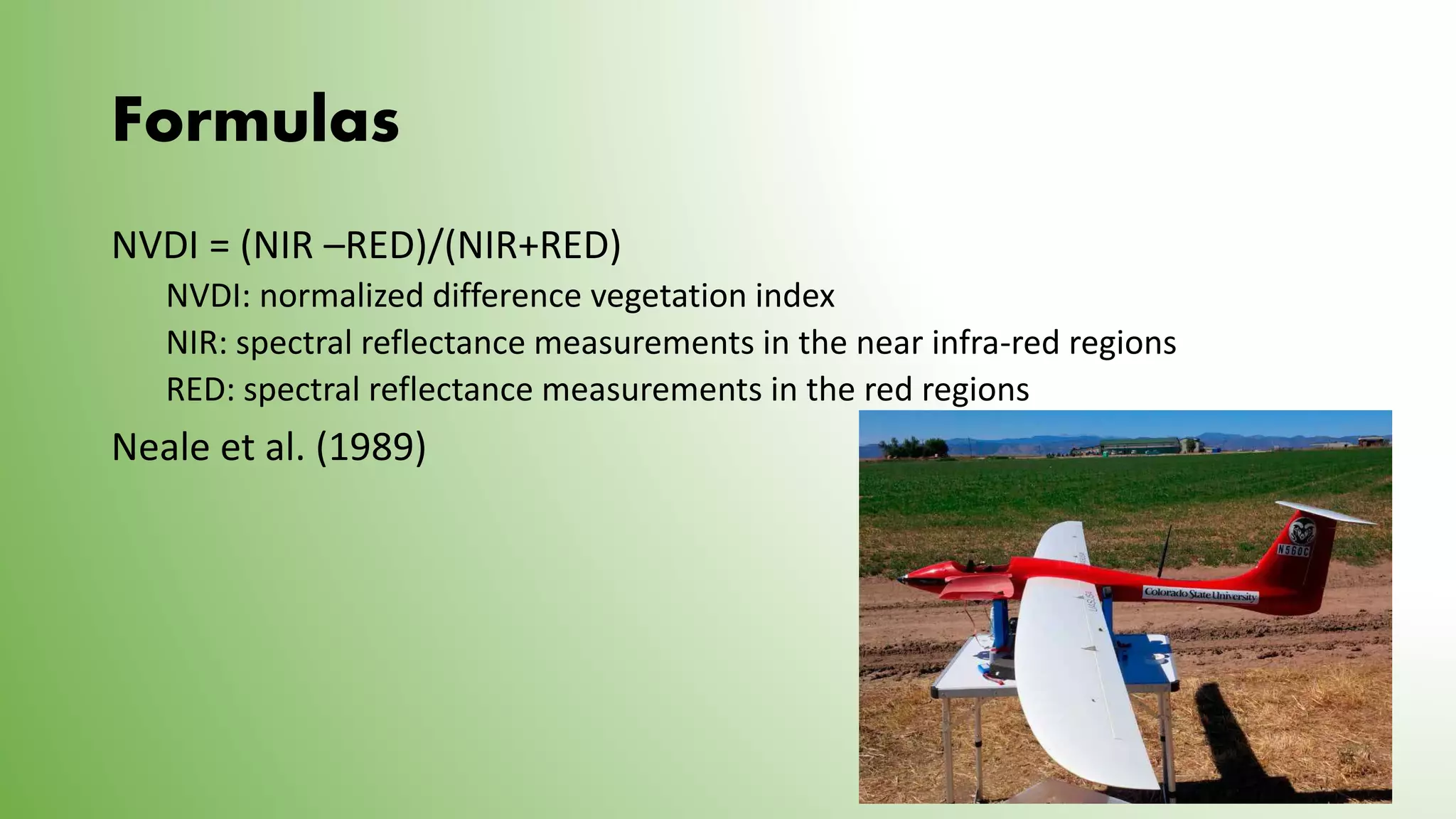
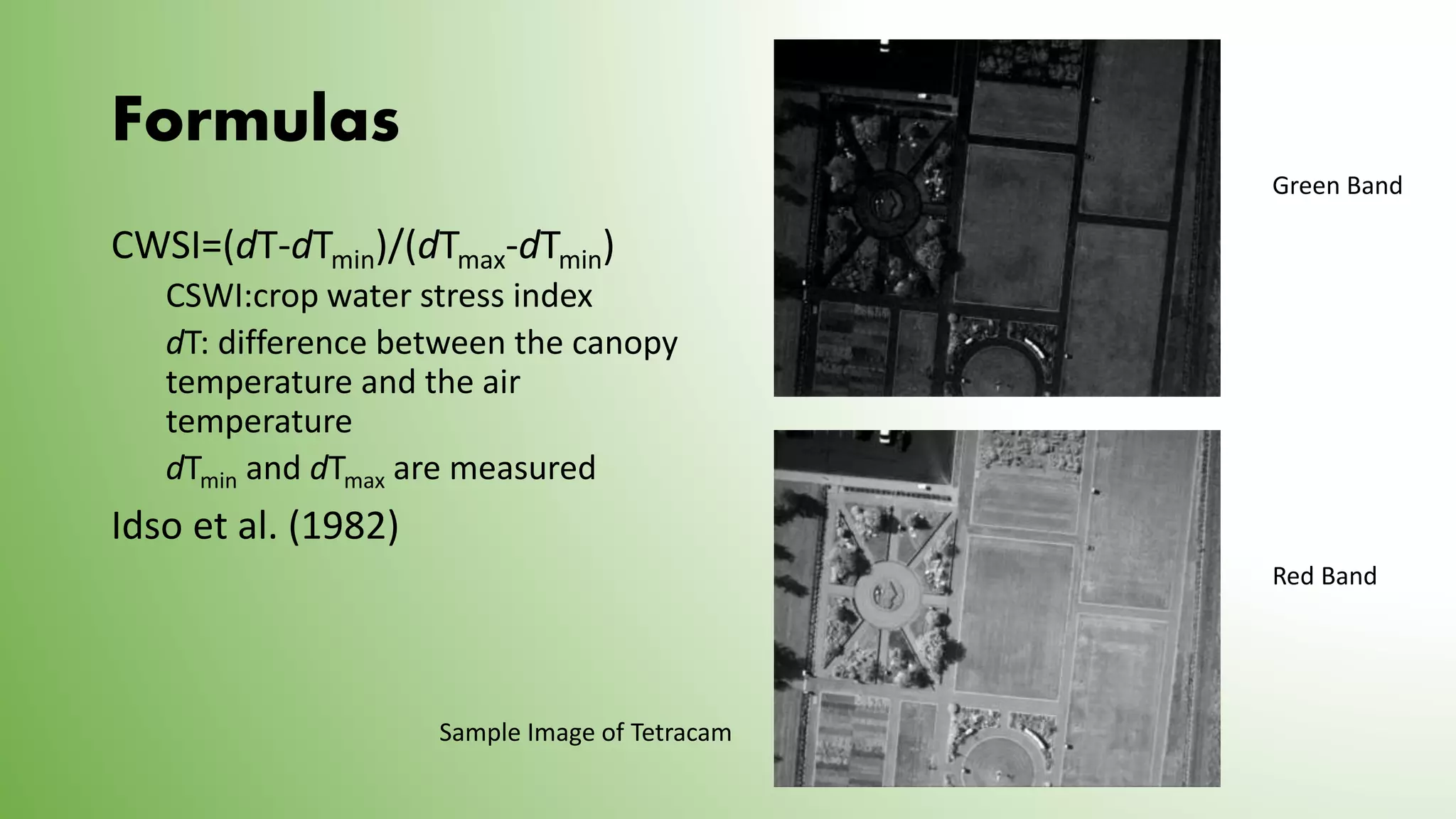
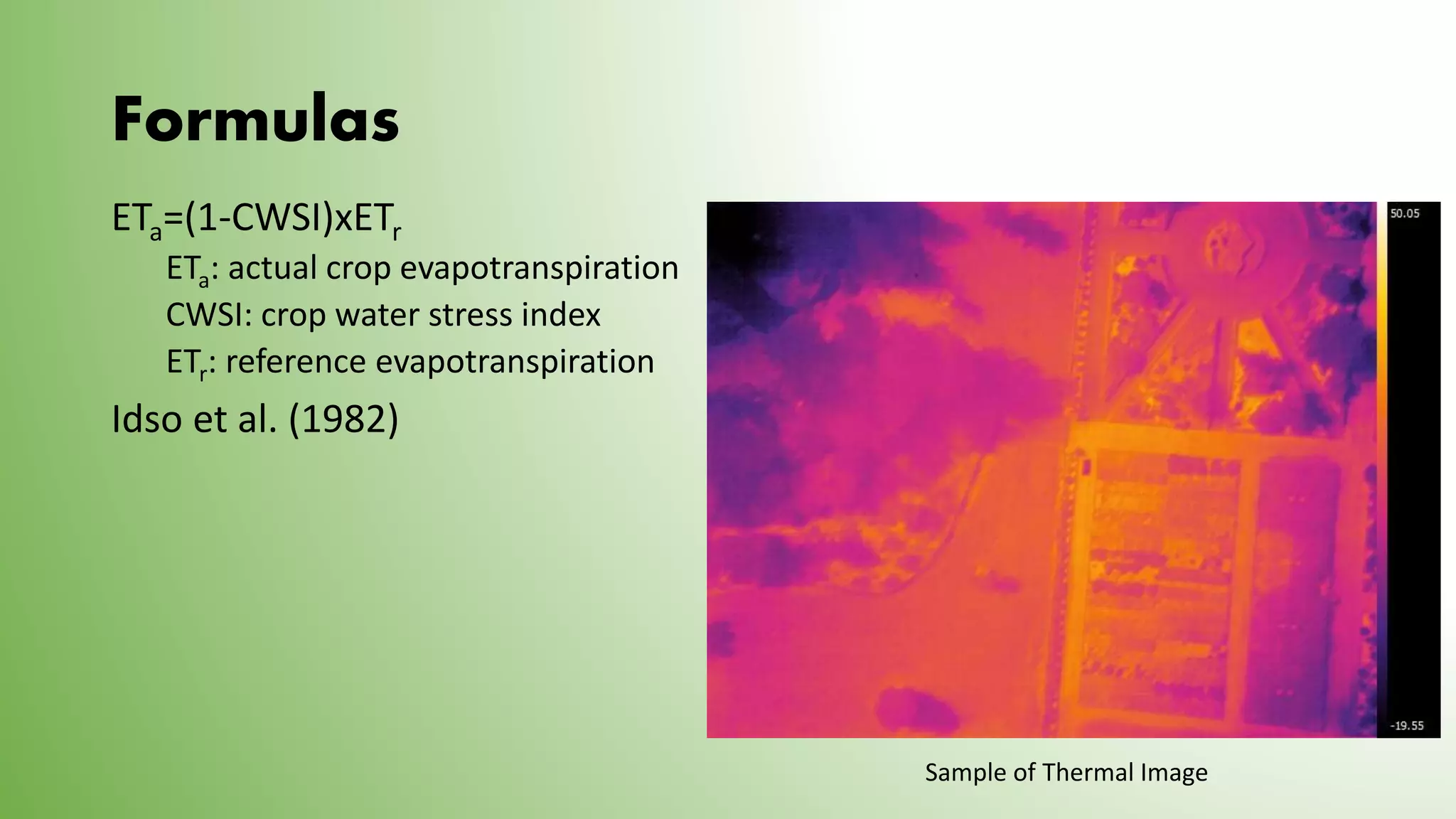
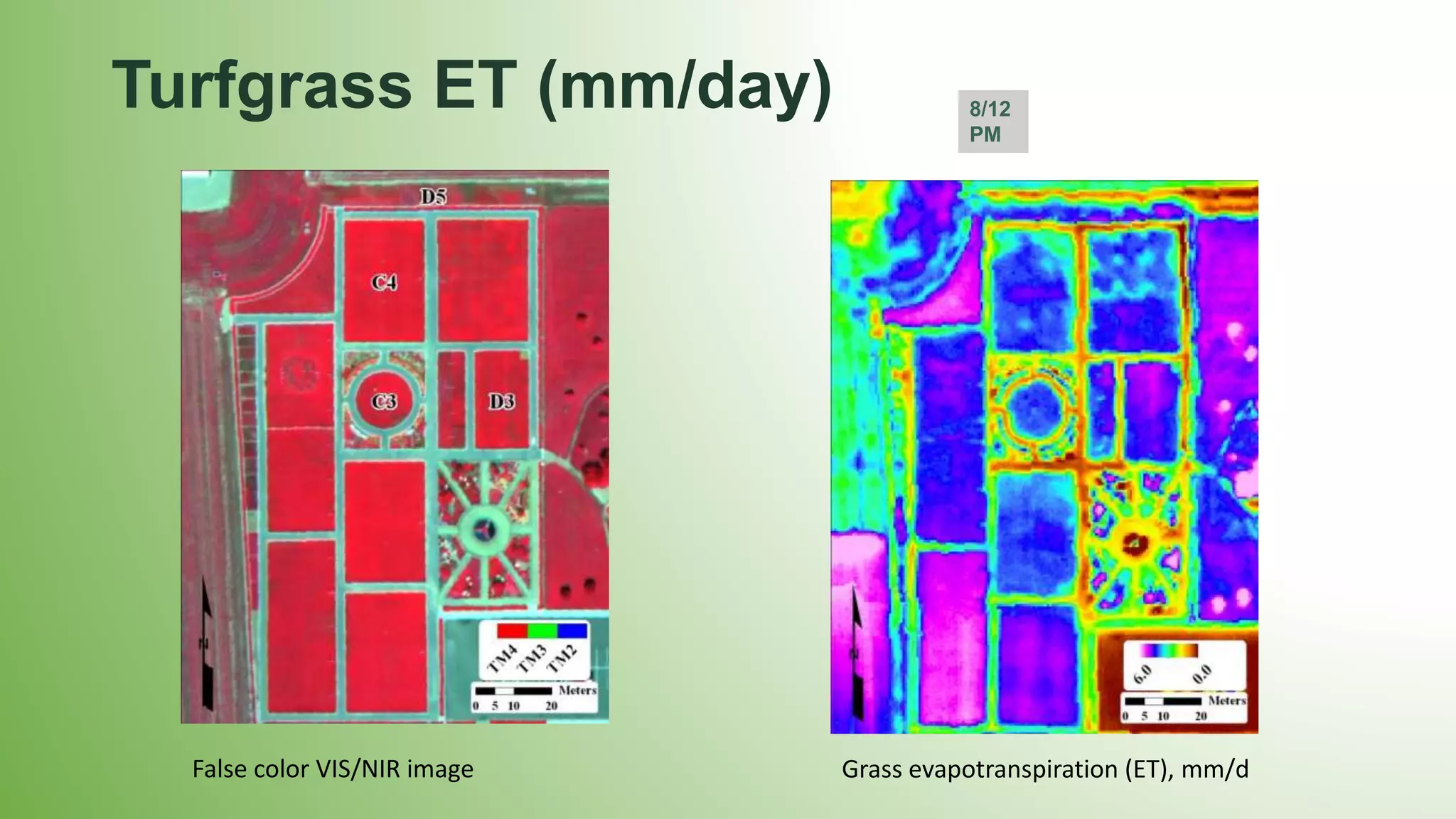
This document discusses using an unmanned aircraft system (UAS) for precision irrigation applications and feasibility studies. The UAS can provide high-resolution RGB, thermal, and multi-spectral imagery to estimate crop evapotranspiration and soil water deficit. Test flights were conducted over corn fields and a plant variety garden to collect imagery. Formulas are presented to calculate evapotranspiration, crop water stress, soil water depletion, and other variables. Challenges encountered included operating the fixed-wing UAS, processing thermal imagery, and the need for diverse operation crews.