Download to read offline

![4
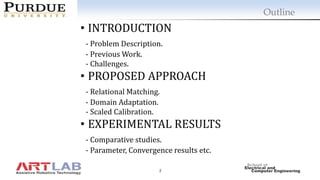
IntroductionRelated Work of ZSL
Zero-shot
Learning
Embedding
Methods
Transductive
approaches
Generative
approaches
Hybrid
approaches
• Linear embedding
[Bernardino et al. ICML’15]
• Deep Embedding
[Zhang et al. CVPR’17]
• Multiview
[Fu et al. TPAMI’15]
• Dictionary Learning
[Kodirov et al. ICCV’15]
• Constrained VAE
[Verma et al. CVPR’18]
• Feature GAN
[Xian et al. CVPR’18]
• Semantic Similarity
[Zhang et al. CVPR ’15]
• Convex Combo
[Norouzi et al. ICLR’13]
[Relate feature & semantics ]
[Use unlabeled test data] [Generate data]
[Novel class from old class]](https://image.slidesharecdn.com/v3-190728151507/85/Zero-shot-Image-Recognition-Using-Relational-Matching-Adaptation-and-Calibration-4-320.jpg)
![6
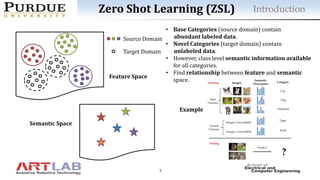
Proposed Solution
One-to-one and pairwise
regression
Domain Adaptation Calibration
• Need to adapt semantic
embeddings to unseen
test data.
• Use previous DA
approach [Das & Lee
EAAI’18].
• Find correspondences
between semantic
embedding and unseen
test samples.
• Scaled calibration to
reduce scores of seen
classes.
• Implicit reduction of
variance of seen
classes.
• Structural matching
between semantics
and feature.
• Implicit
reduction of
dimensionality.
Proposed Approach
ADDRESS HUBNESS ADDRESS DOMAIN
SHIFT
ADDRESS BIASEDNESS](https://image.slidesharecdn.com/v3-190728151507/85/Zero-shot-Image-Recognition-Using-Relational-Matching-Adaptation-and-Calibration-6-320.jpg)
![11
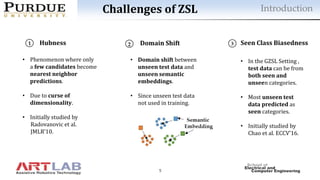
Experimental Results
• Animals with Attributes (AwA2)
[Lampert et al. TPAMI’14]
(Att – 85, Ysrc - 40 , Ytar - 10 )
• Pascal & Yahoo (aPY)
[Farhadi et al. CVPR’09]
(Att – 64, Ysrc - 20 , Ytar - 12 )
• Caltech-UCSD Birds (CUB)
[Welinder et al. ‘10]
(Att – 312, Ysrc - 150 , Ytar - 50 )
• Scene Understanding (SUN)
[Patterson et al. CVPR’12]
(Att – 102, Ysrc - 645, Ytar - 72 )
DatasetsComparison with previous work on four datasets.
Comparative Study
tr – Unseen class accuracy in traditional setting
u – Unseen class accuracy in generalized setting
s – Seen class accuracy in generalized setting
H – Harmonic mean of u and s
R – Relational Matching
RA – Relational Matching + Domain Adaptation
RC – Relational Matching + Scaled Calibration
RAC – Relational Matching + Domain
Adaptation + Scaled Calibration](https://image.slidesharecdn.com/v3-190728151507/85/Zero-shot-Image-Recognition-Using-Relational-Matching-Adaptation-and-Calibration-11-320.jpg)
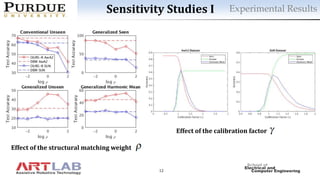
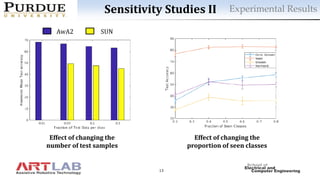
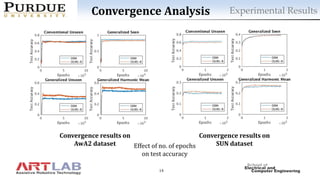
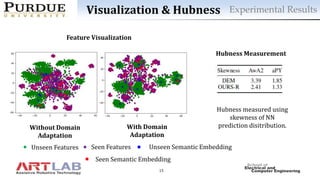

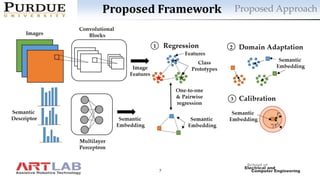
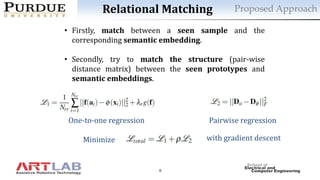
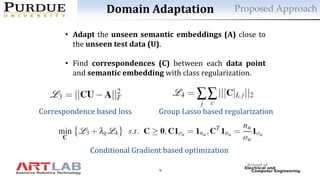
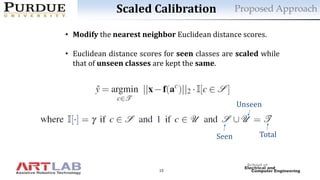
This document proposes a three-step approach for zero-shot image recognition using relational matching, domain adaptation, and calibration. The approach uses relational matching to find structural correspondences between semantic embeddings and features, domain adaptation to adapt unseen semantic embeddings to the test data domain, and calibration to reduce bias towards seen classes. Experimental results on four datasets show improved zero-shot and generalized zero-shot classification performance compared to previous methods, with domain adaptation providing the most benefit. Analysis of hubness and convergence properties are also presented.





























![[DSC Europe 24] Nemanja Milosevic - Beyond Supervised Learning with Zero-Shot...](https://cdn.slidesharecdn.com/ss_thumbnails/nemanjamilosevic-241219150756-b1cc16e6-thumbnail.jpg?width=640&height=640&fit=bounds)











![[NS][Lab_Seminar_250106]SAM-Aware Graph Prompt Reasoning Network for Cross-Do...](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar250106gprn-250106075150-b64c5cde-thumbnail.jpg?width=640&height=640&fit=bounds)


![[NS][Lab_Seminar_250707]Learning with Noisy Triplet Correspondence for Compos...](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar250707tme-250707125516-5f5922dd-thumbnail.jpg?width=640&height=640&fit=bounds)









![Hacking-Uncovered-How-People-Get-Hacked-and-How-to-Stay-Safe[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/hacking-uncovered-how-people-get-hacked-and-how-to-stay-safe1-260130170011-4883a9c7-thumbnail.jpg?width=640&height=640&fit=bounds)

![7.__Developing_a_Research_Proposal[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/7-260131073037-df92dd7d-thumbnail.jpg?width=640&height=640&fit=bounds)















