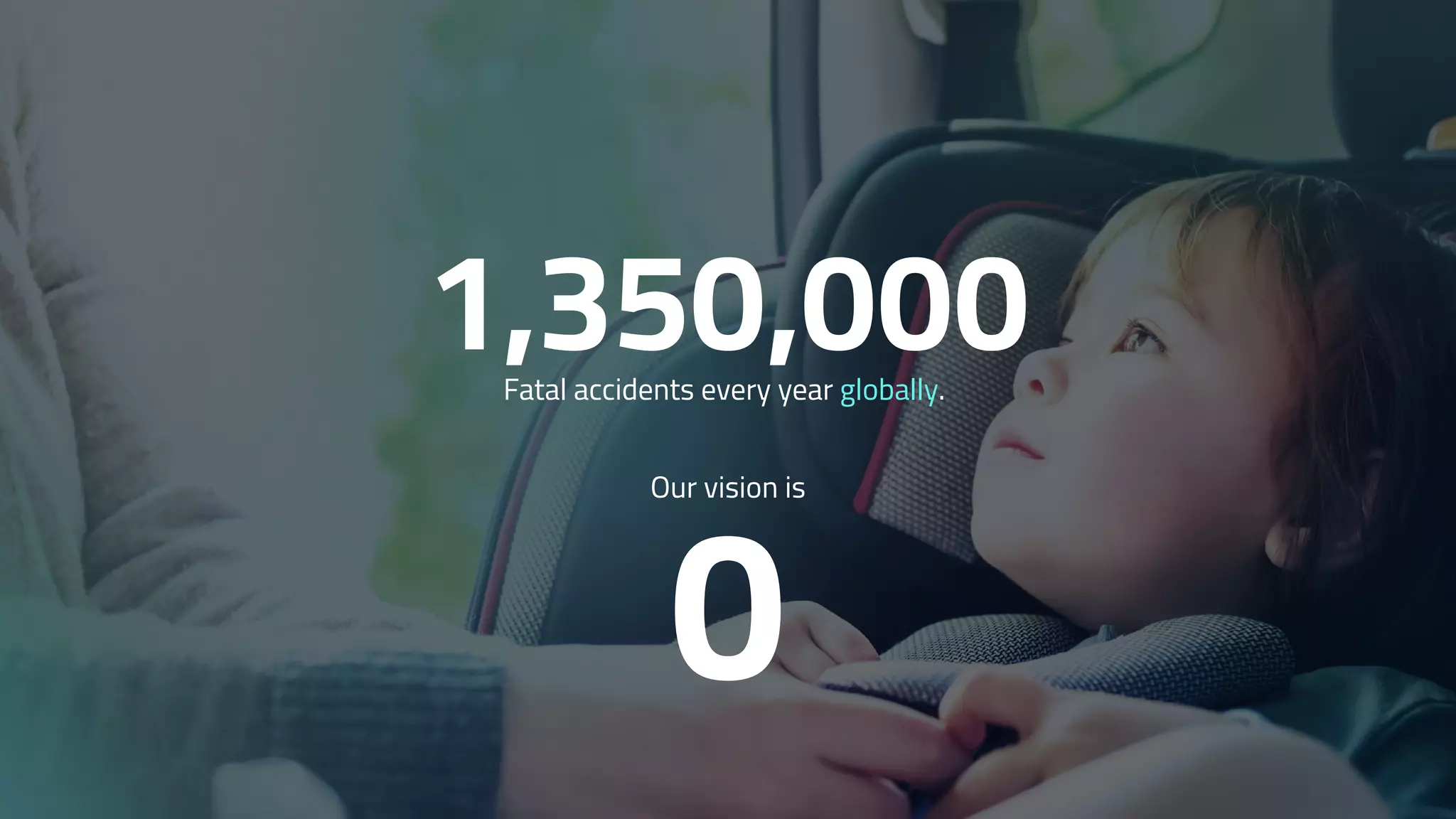
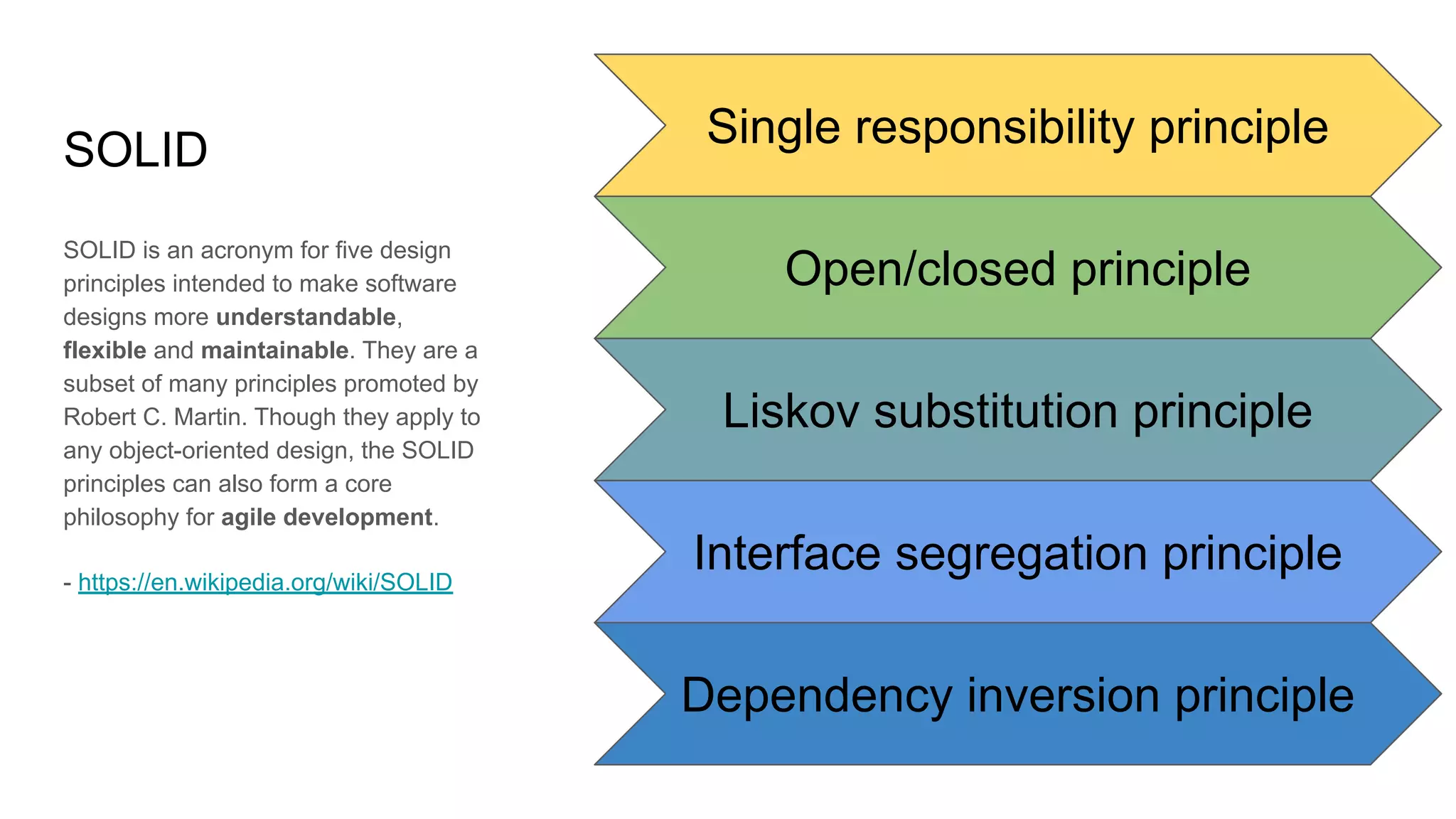
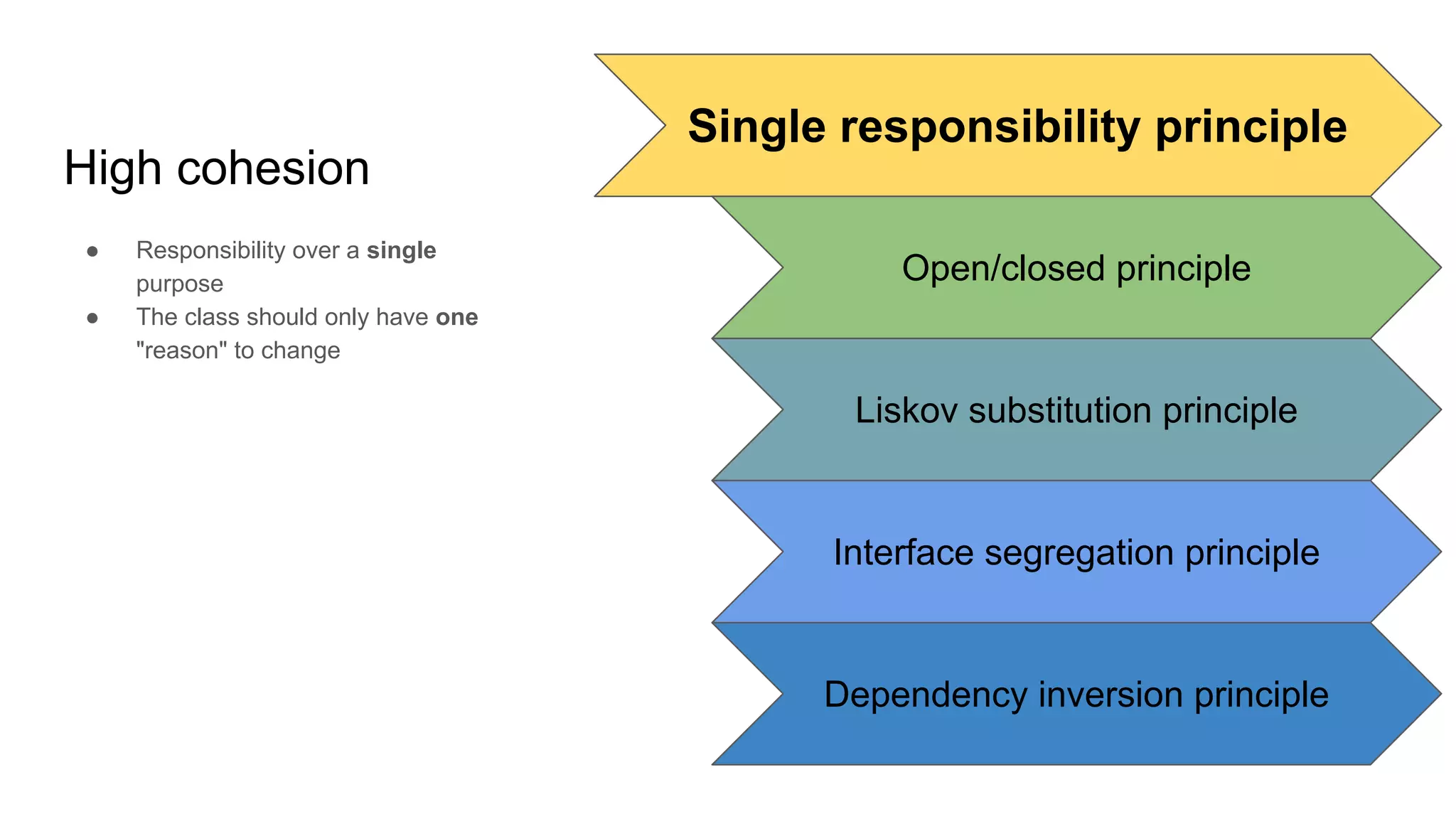
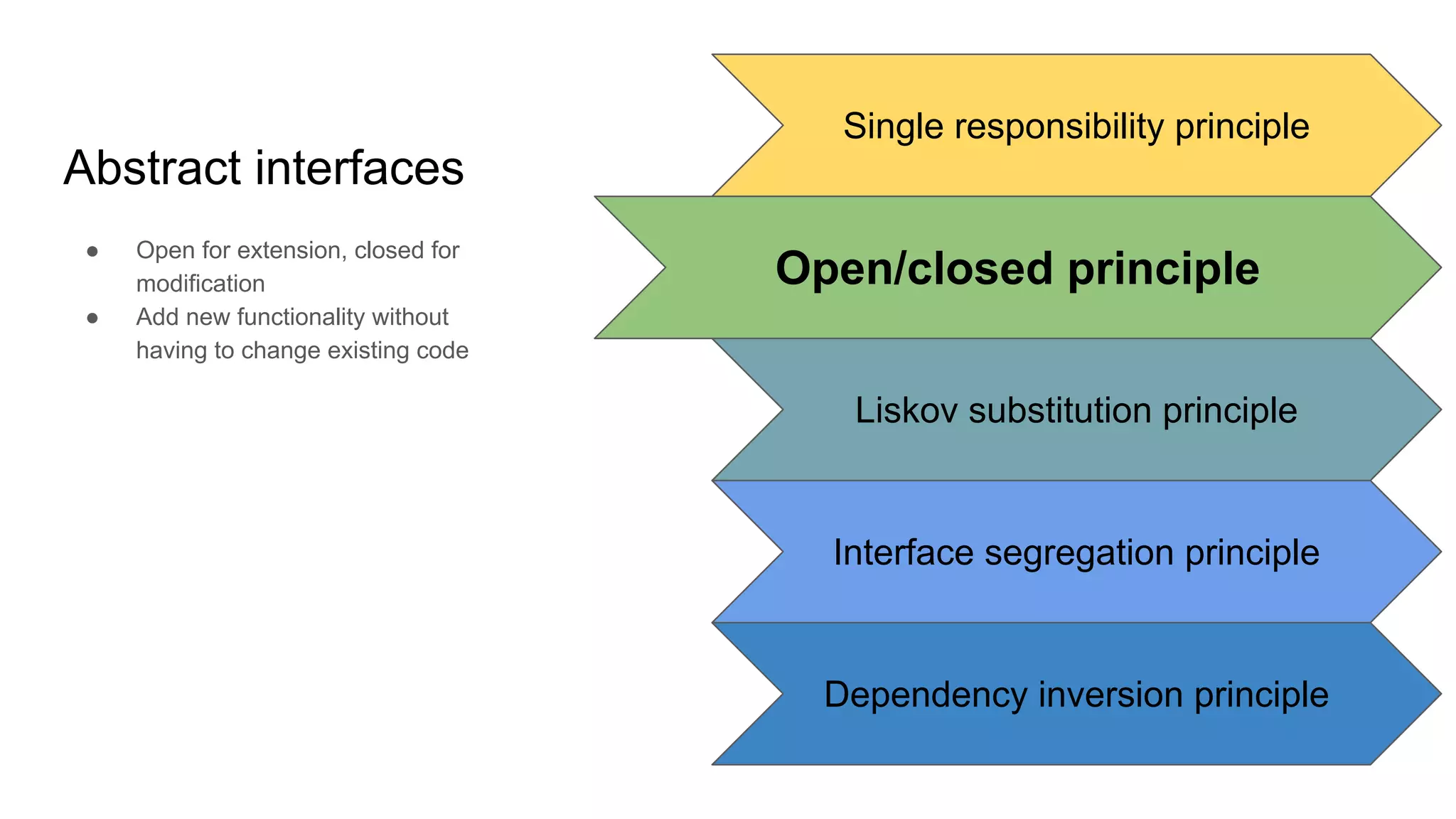
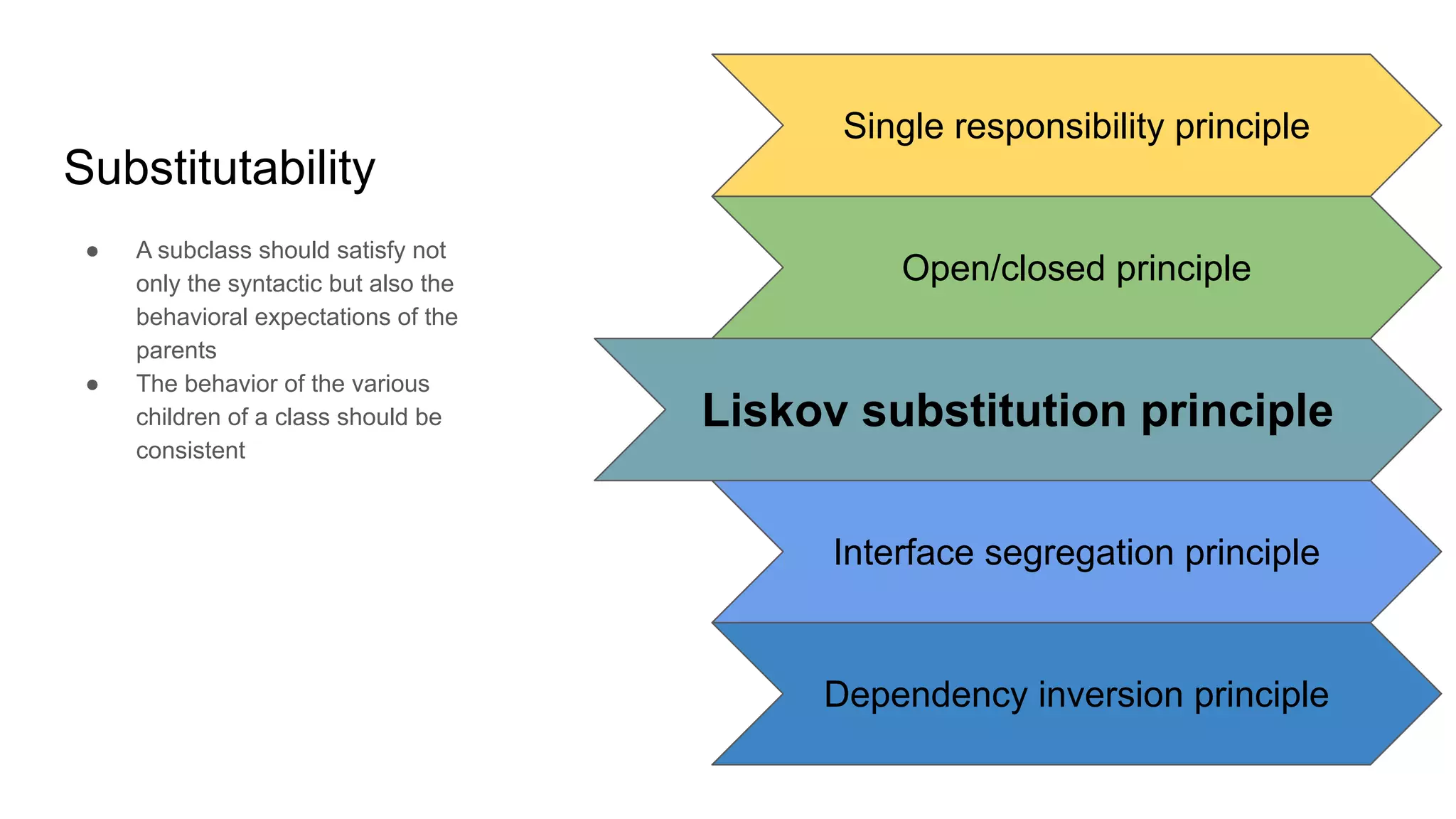
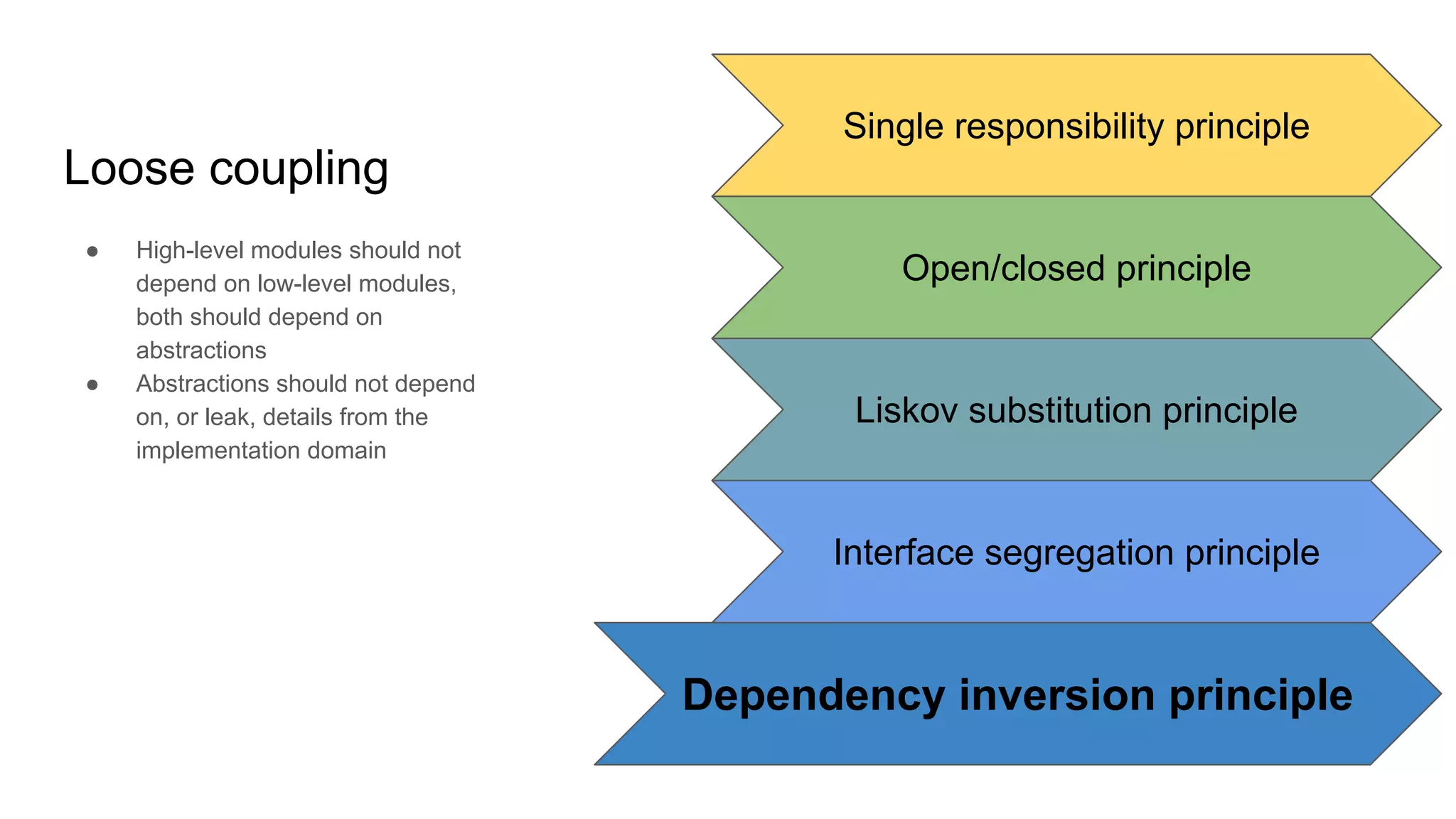
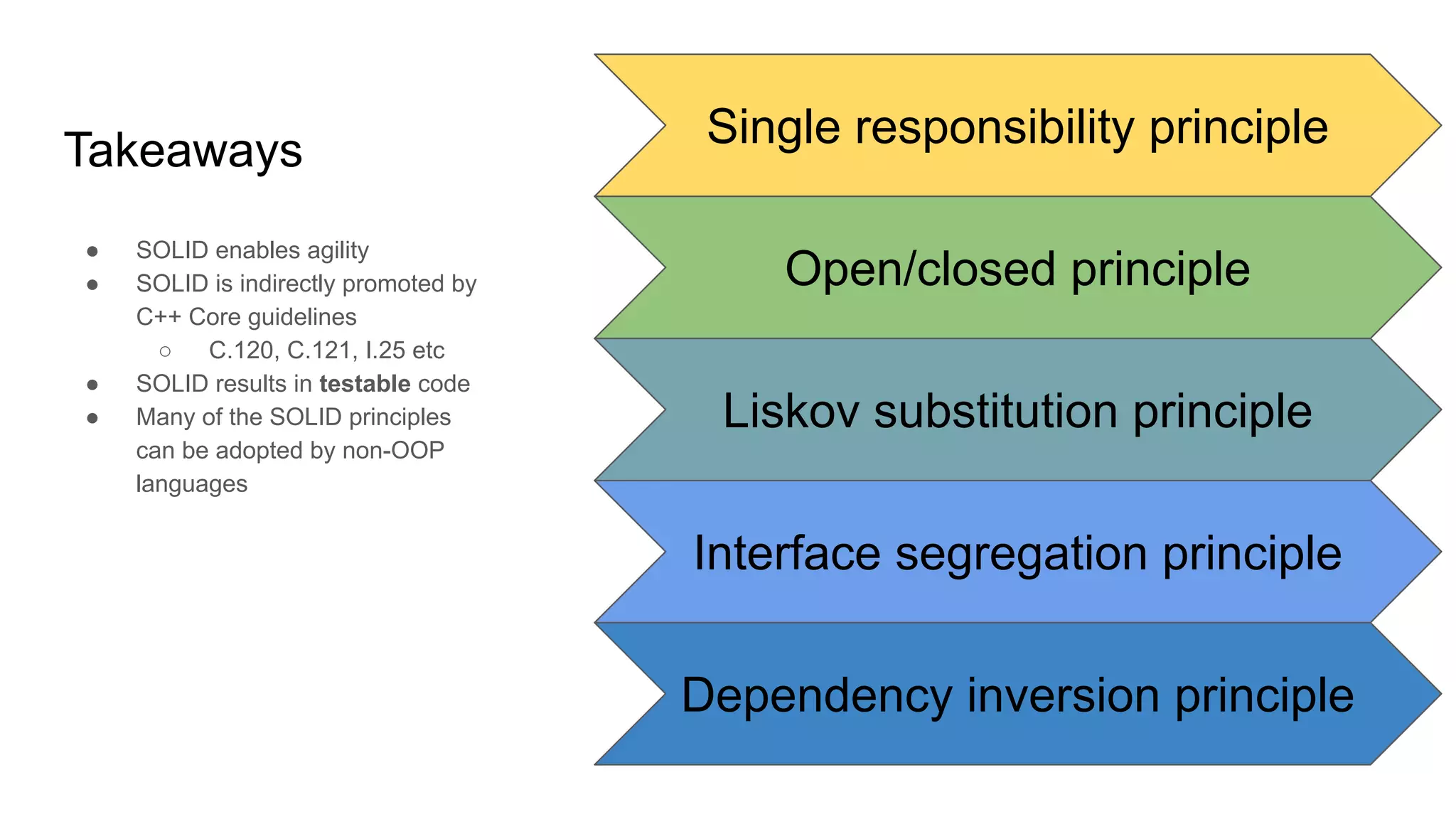
Zenseact aims to achieve zero fatal accidents globally, backed by a team of over 600 employees and advanced artificial intelligence technologies. The document elaborates on the SOLID design principles for software engineering, which enhance code maintainability and flexibility, and their application in object-oriented programming. It concludes with practical insights and engagements for the audience regarding software design and development strategies.


 {
users += user.erase(0, kPrefix.length()) + ",";
};
return users;
}
};](https://image.slidesharecdn.com/writingsolidc2-211126183844/75/Writing-SOLID-C-gbgcpp-meetup-Zenseact-14-2048.jpg)
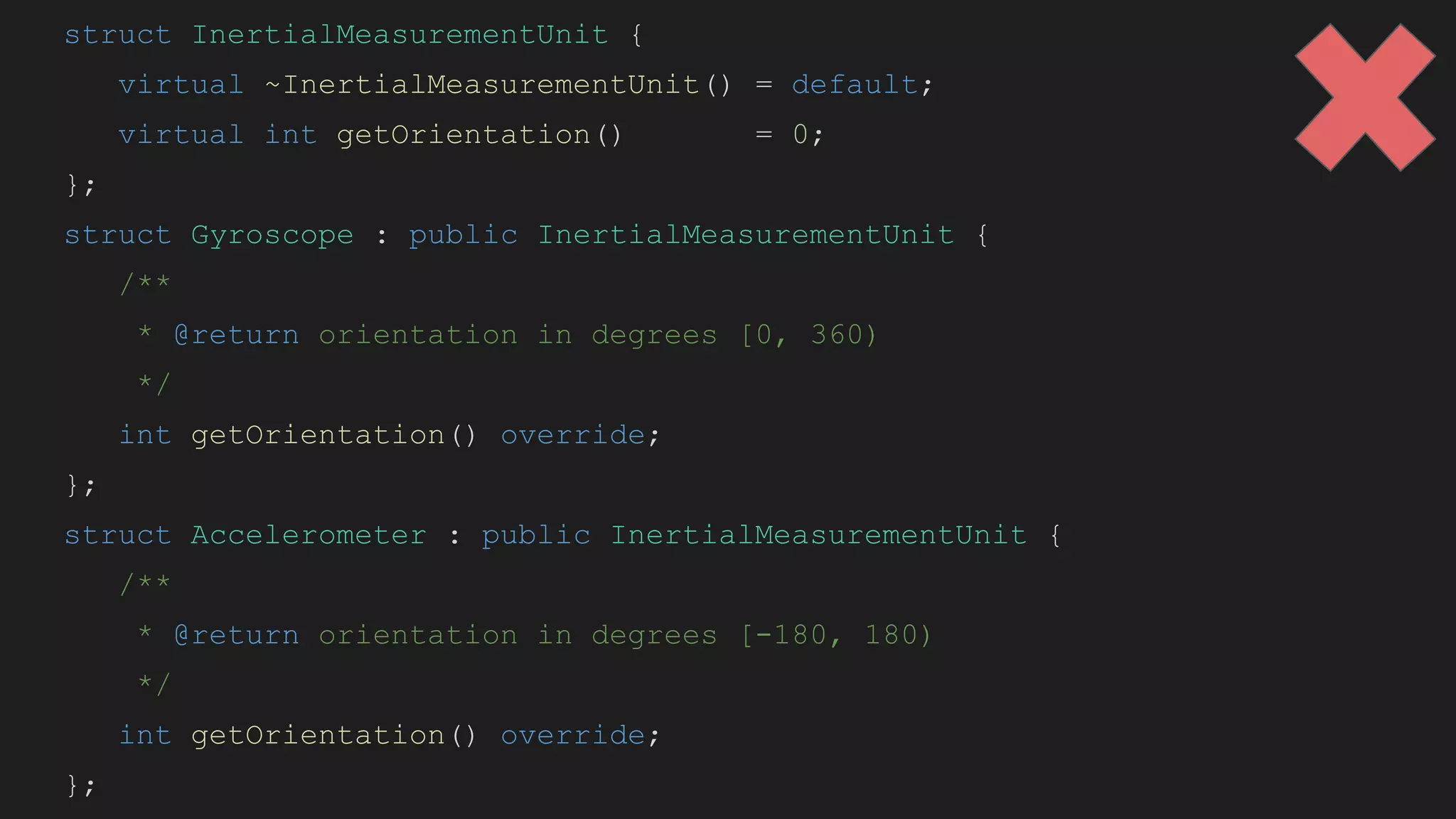
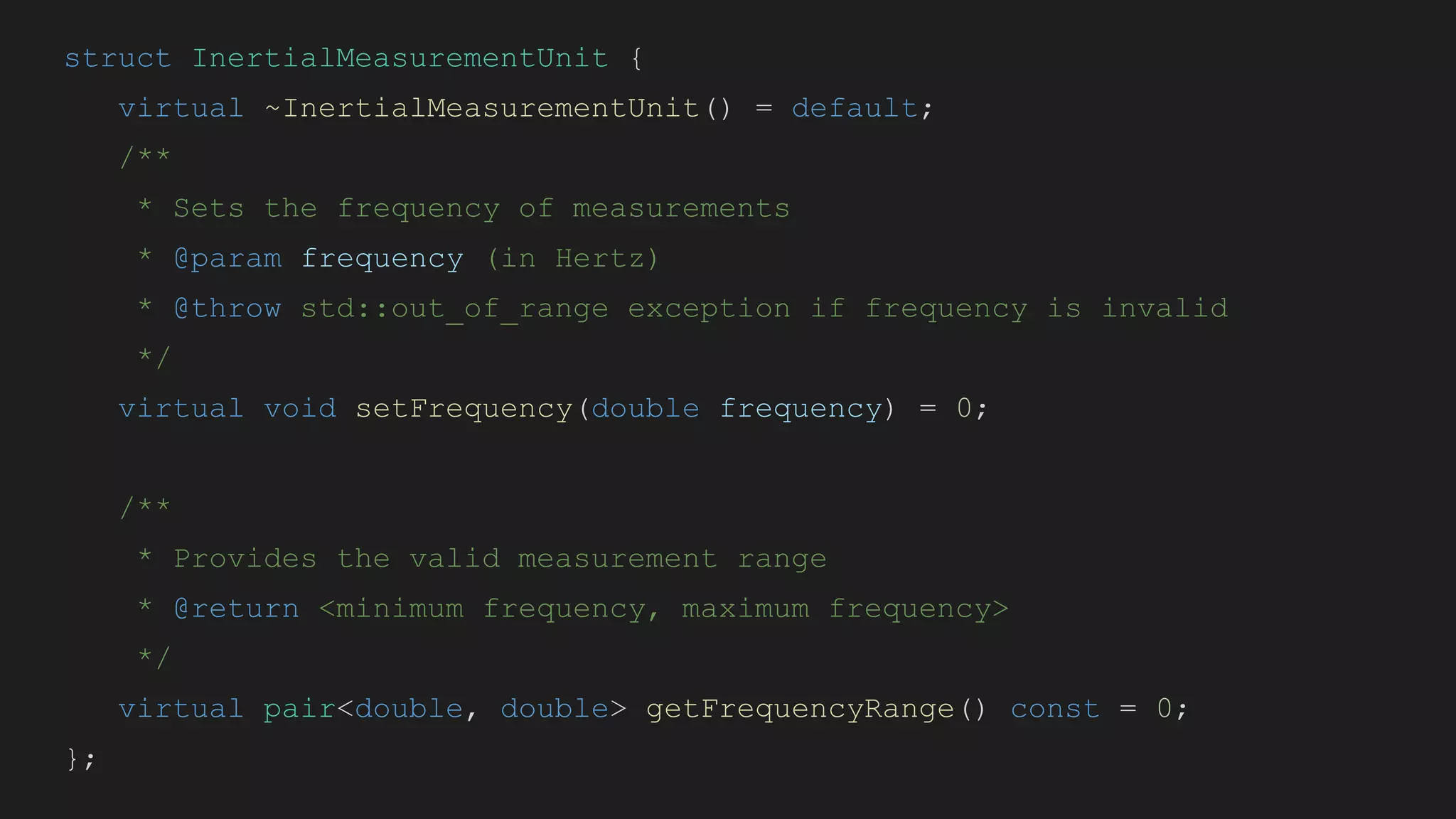
![struct InertialMeasurementUnit {
virtual ~InertialMeasurementUnit
() = default;
/**
* Sets the frequency of measurements
* @param frequency (in Hertz)
* @return Whether frequency was valid
*/
virtual bool setFrequency(double frequency) = 0;
};
struct Gyroscope : public InertialMeasurementUnit {
// Valid range [0.5, 10]
bool setFrequency(double frequency) override;
};
struct Accelerometer : public InertialMeasurementUnit {
// Valid range [0.1, 100]
bool setFrequency(double frequency) override;
};](https://image.slidesharecdn.com/writingsolidc2-211126183844/75/Writing-SOLID-C-gbgcpp-meetup-Zenseact-21-2048.jpg)










































![[gbgcpp] Let's get comfortable with concepts](https://cdn.slidesharecdn.com/ss_thumbnails/dimitris-platis-gbgcpp-concepts-250508080200-9d7e1e91-thumbnail.jpg?width=640&height=640&fit=bounds)

![[GRCPP] Introduction to concepts (C++20)](https://cdn.slidesharecdn.com/ss_thumbnails/concepts-meetup-240511104719-0985a5b9-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Koln C++] Safer C++: 25 MISRA Rules Explored](https://cdn.slidesharecdn.com/ss_thumbnails/overview-misra-cpp17-250930185006-a87b2cd2-thumbnail.jpg?width=640&height=640&fit=bounds)







![[GRCPP] George Doumas - How to learn C++](https://cdn.slidesharecdn.com/ss_thumbnails/george-doumas-xm-250919200020-e736a903-thumbnail.jpg?width=640&height=640&fit=bounds)
![[grcpp] Refactoring for testability c++](https://cdn.slidesharecdn.com/ss_thumbnails/refactoringfortestabilityc-200915192647-thumbnail.jpg?width=640&height=640&fit=bounds)


















