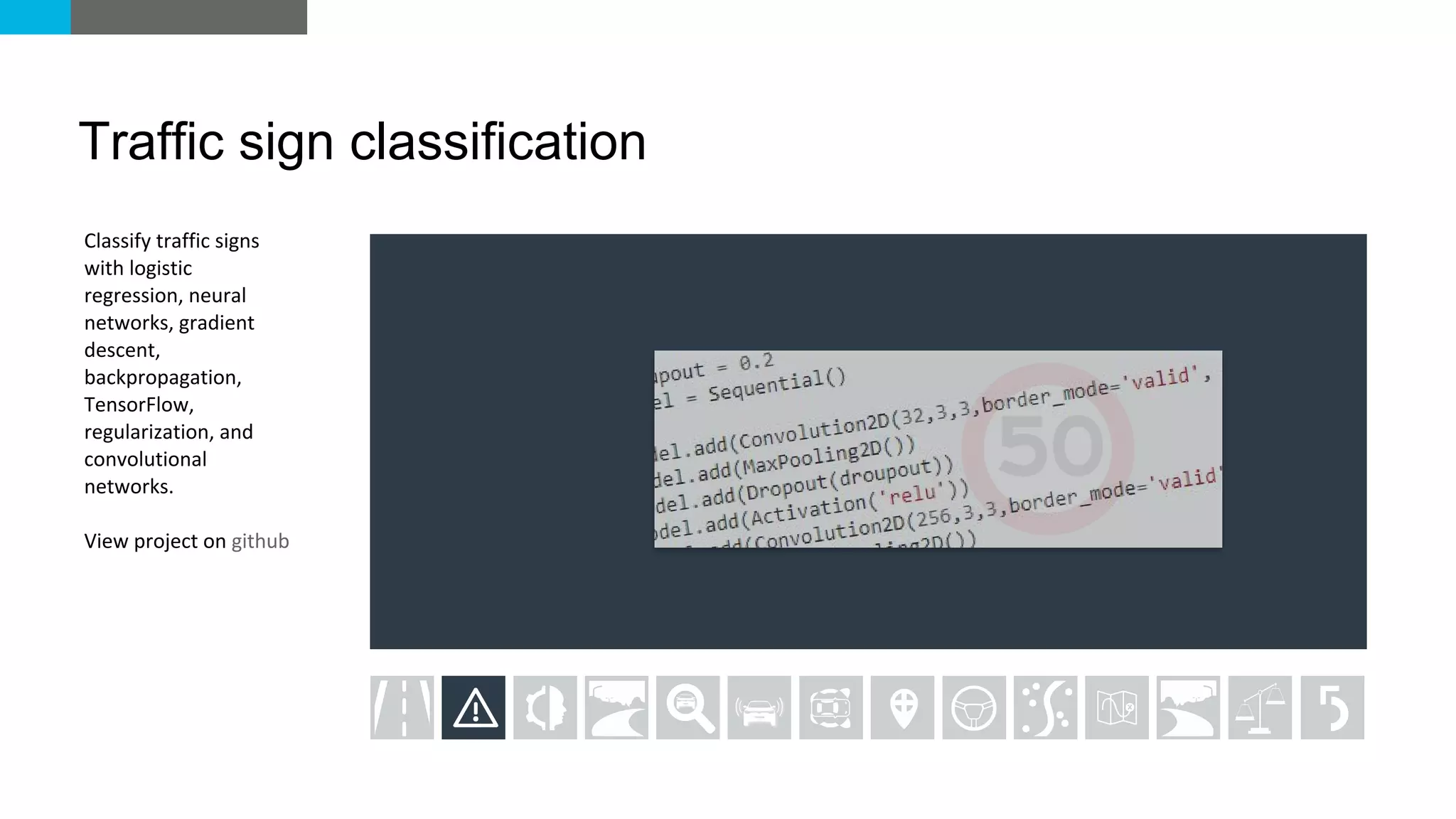








The document outlines the curriculum for Udacity's Self-Driving Car Engineer Nanodegree program, which is divided into three terms covering computer vision and deep learning, sensor fusion and control, and path planning and systems. The terms include 14 projects involving techniques like lane detection, traffic sign classification, behavioral cloning, Kalman filtering, particle filtering, PID control, path planning and more. Upon completion, the program has been assessed as equivalent to a 60 credit master's degree program.