Download to read offline
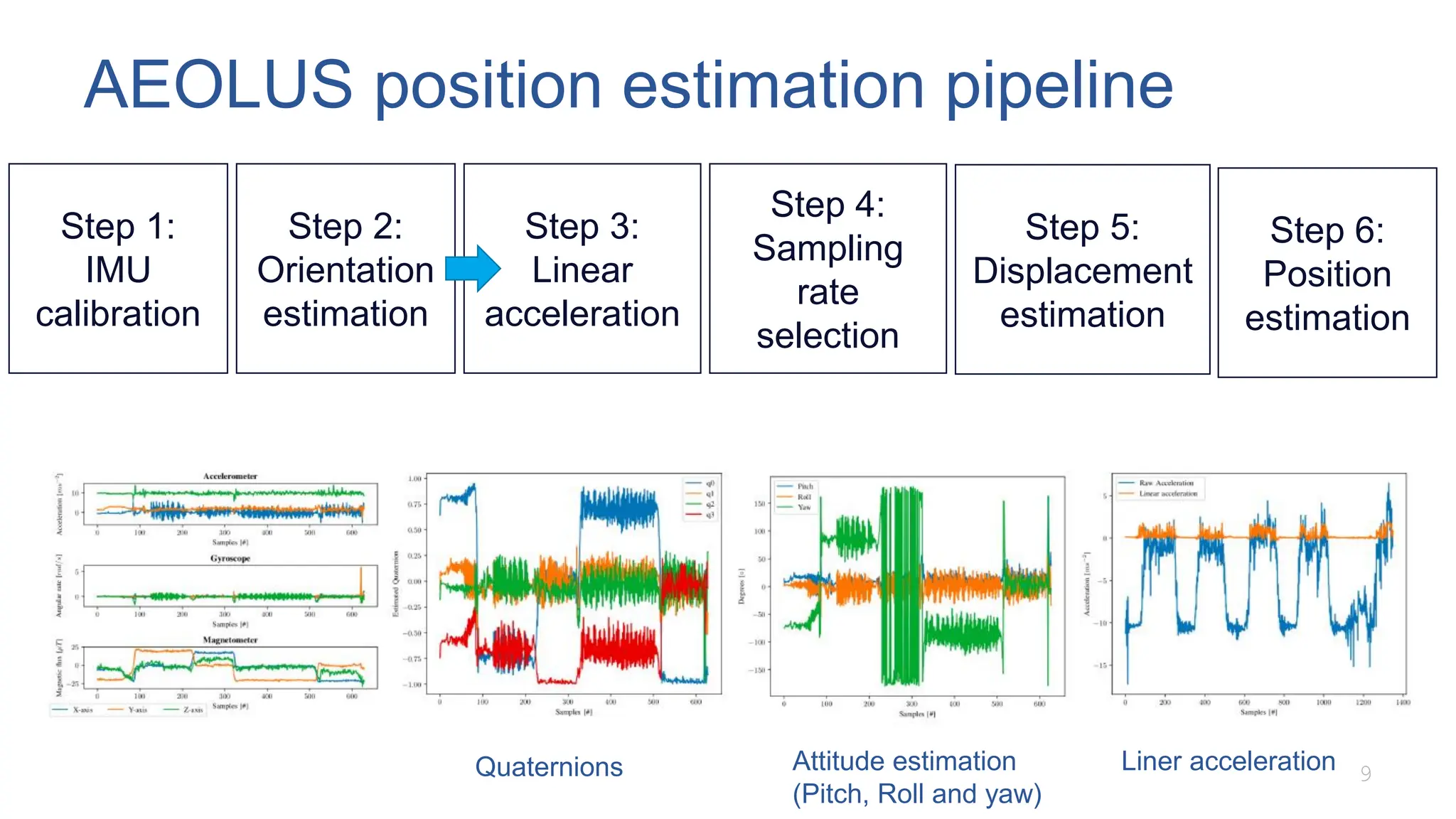
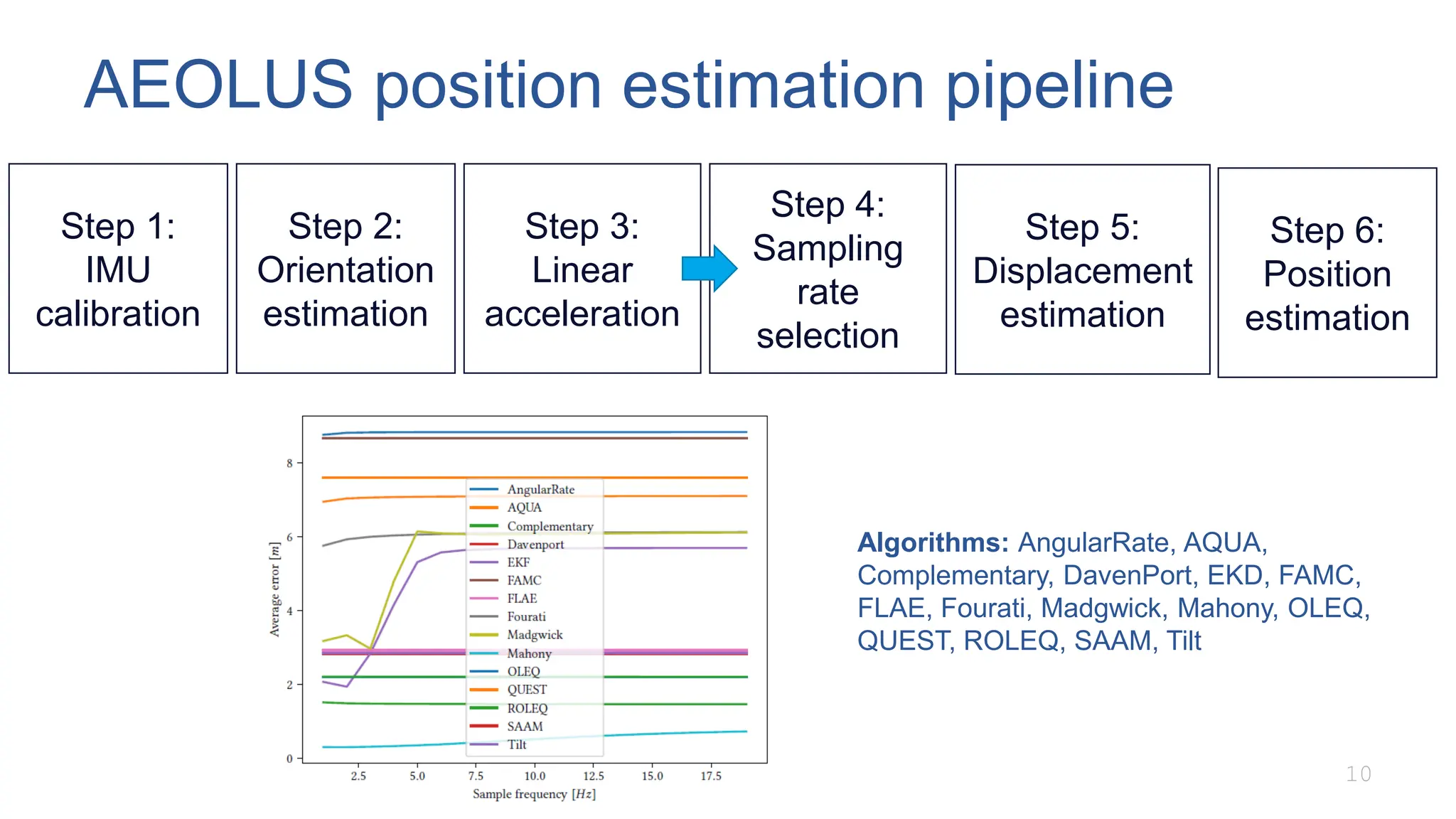
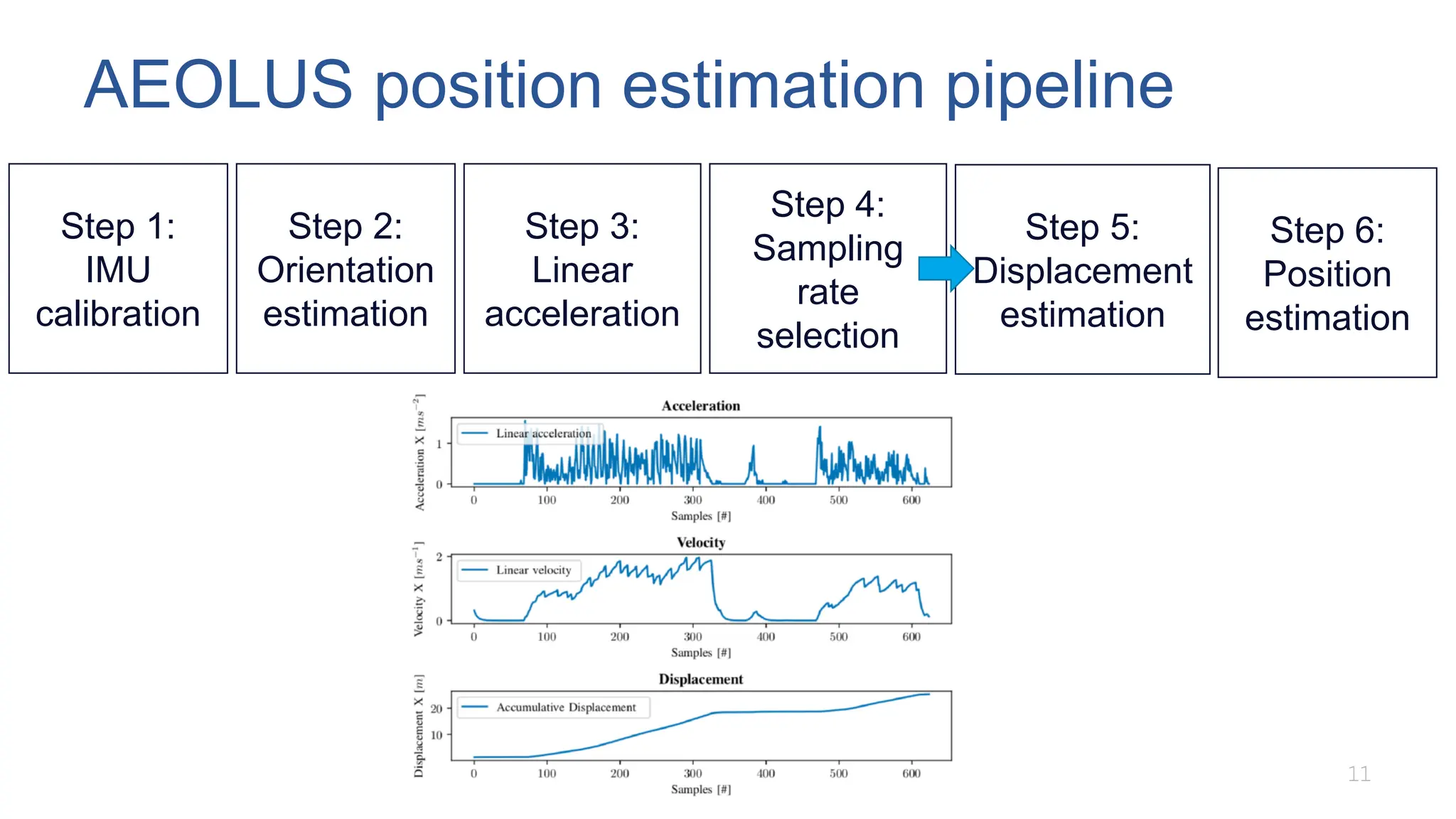
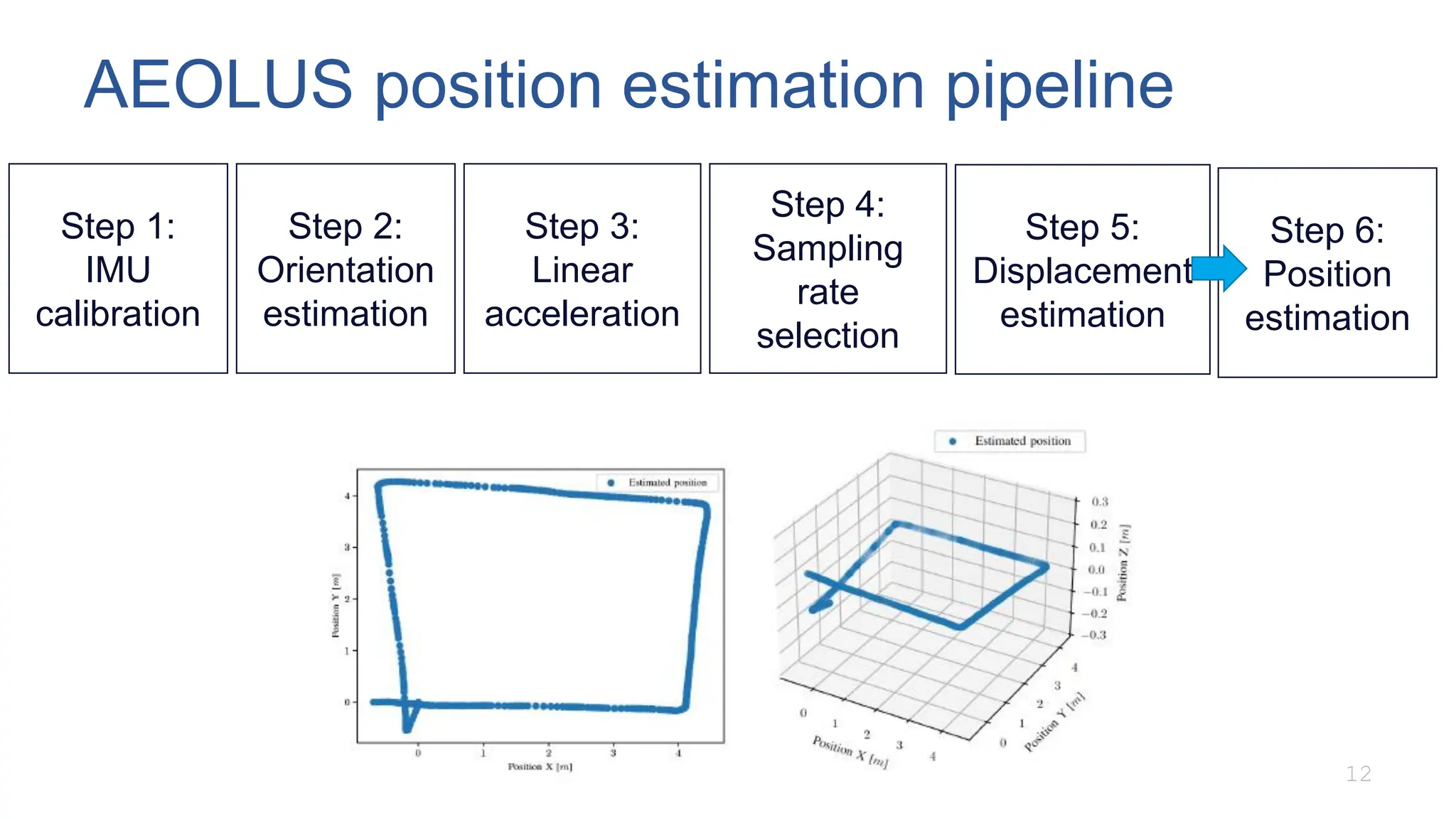
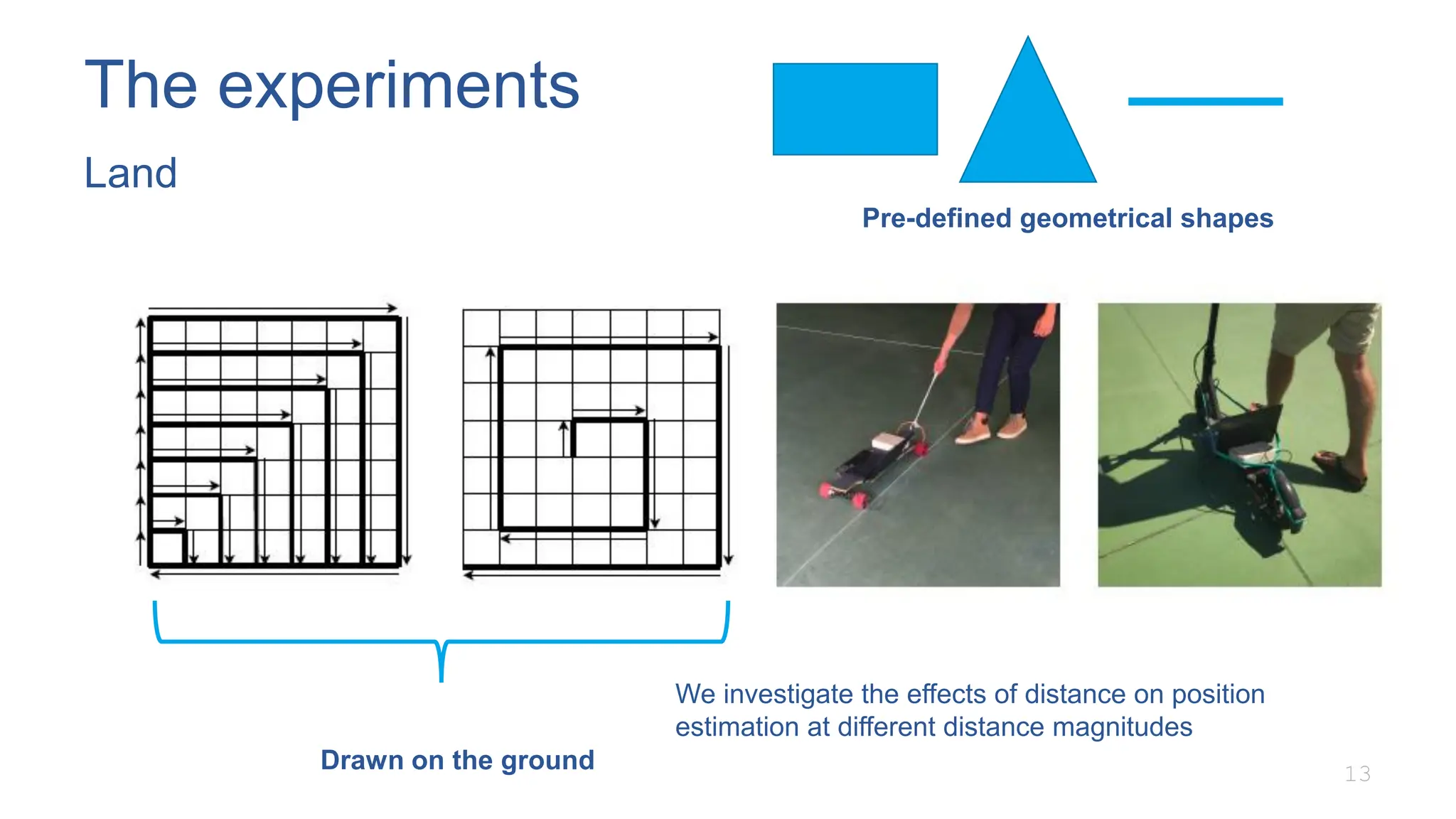
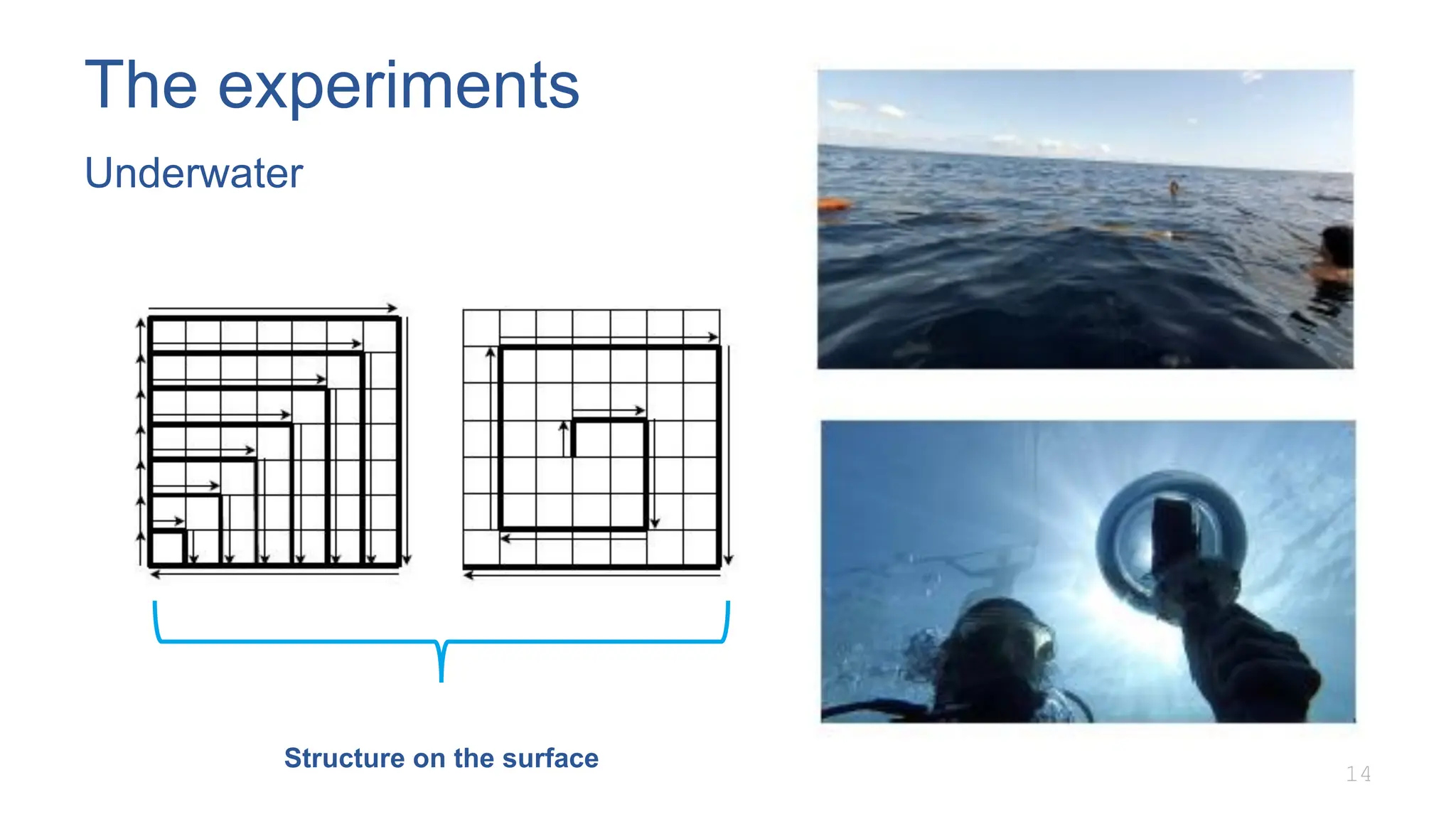
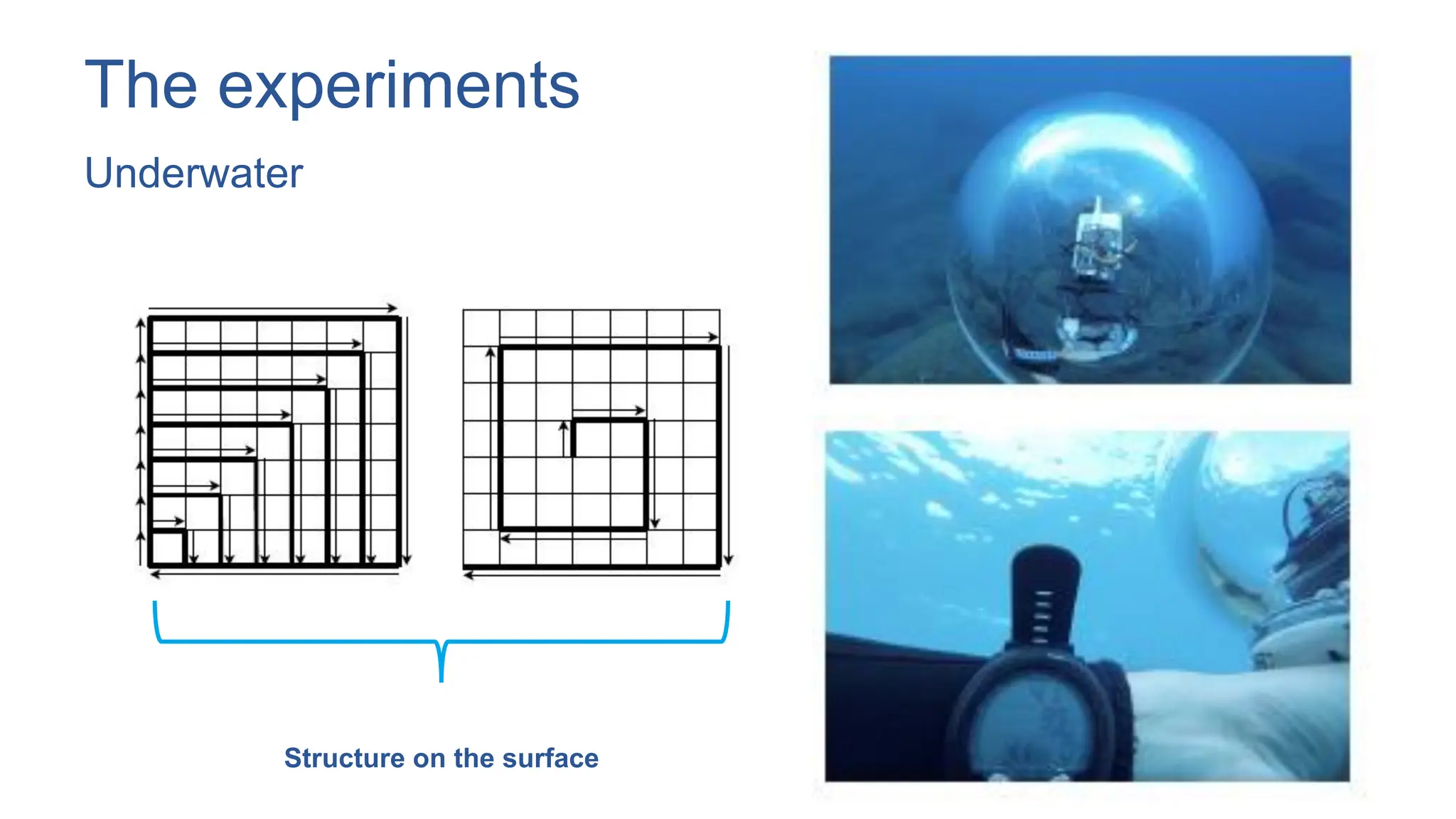
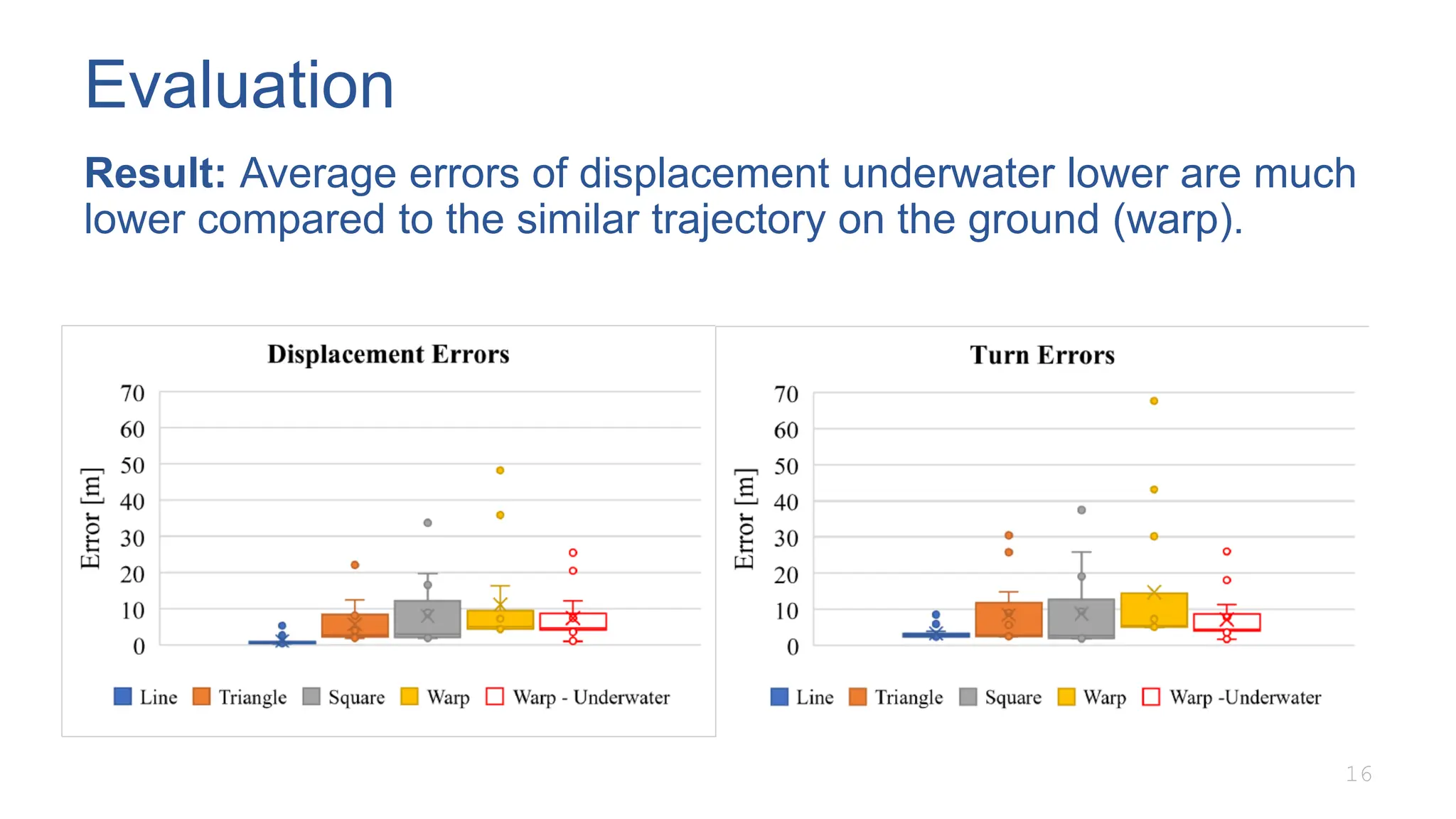
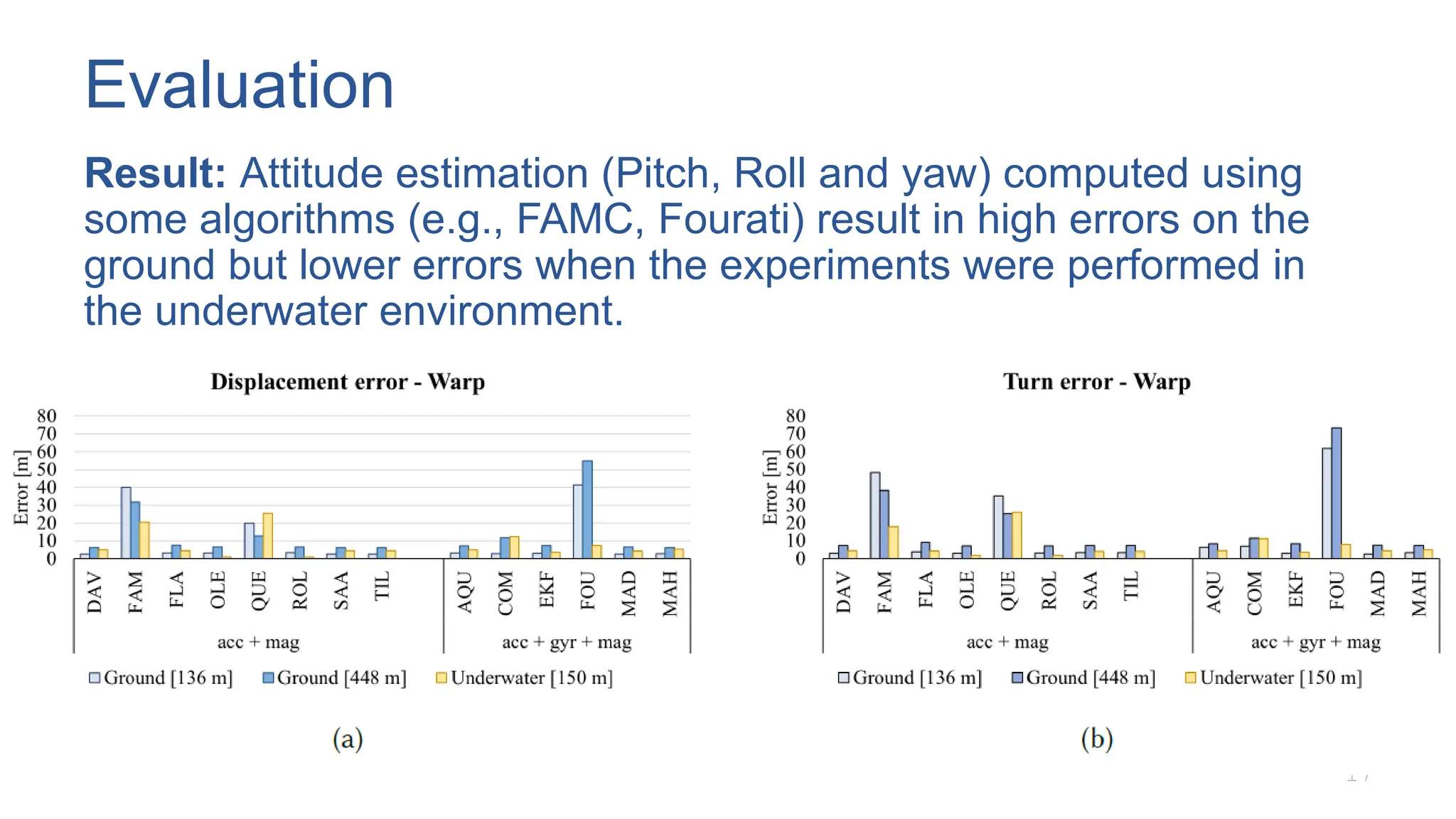
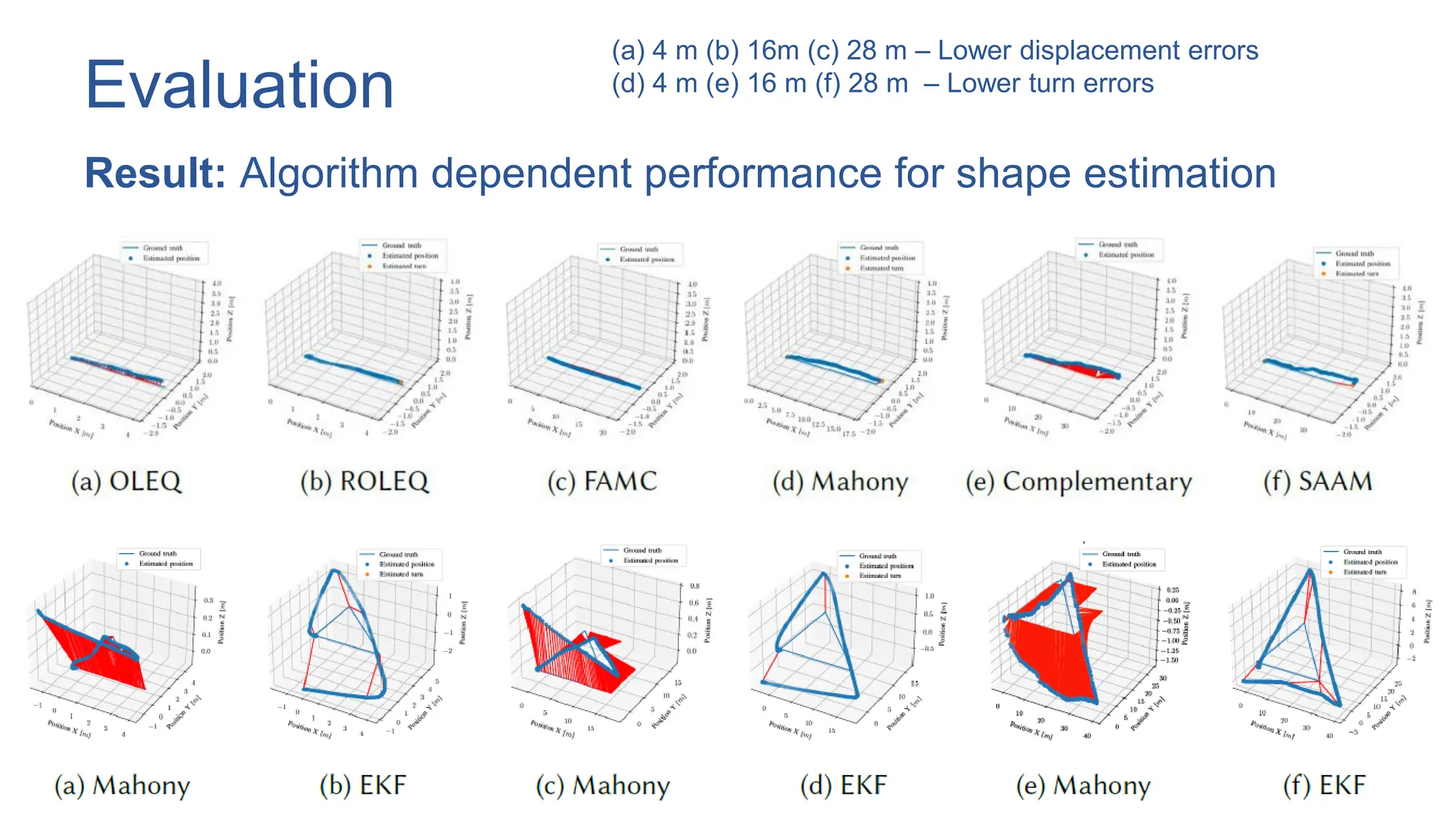
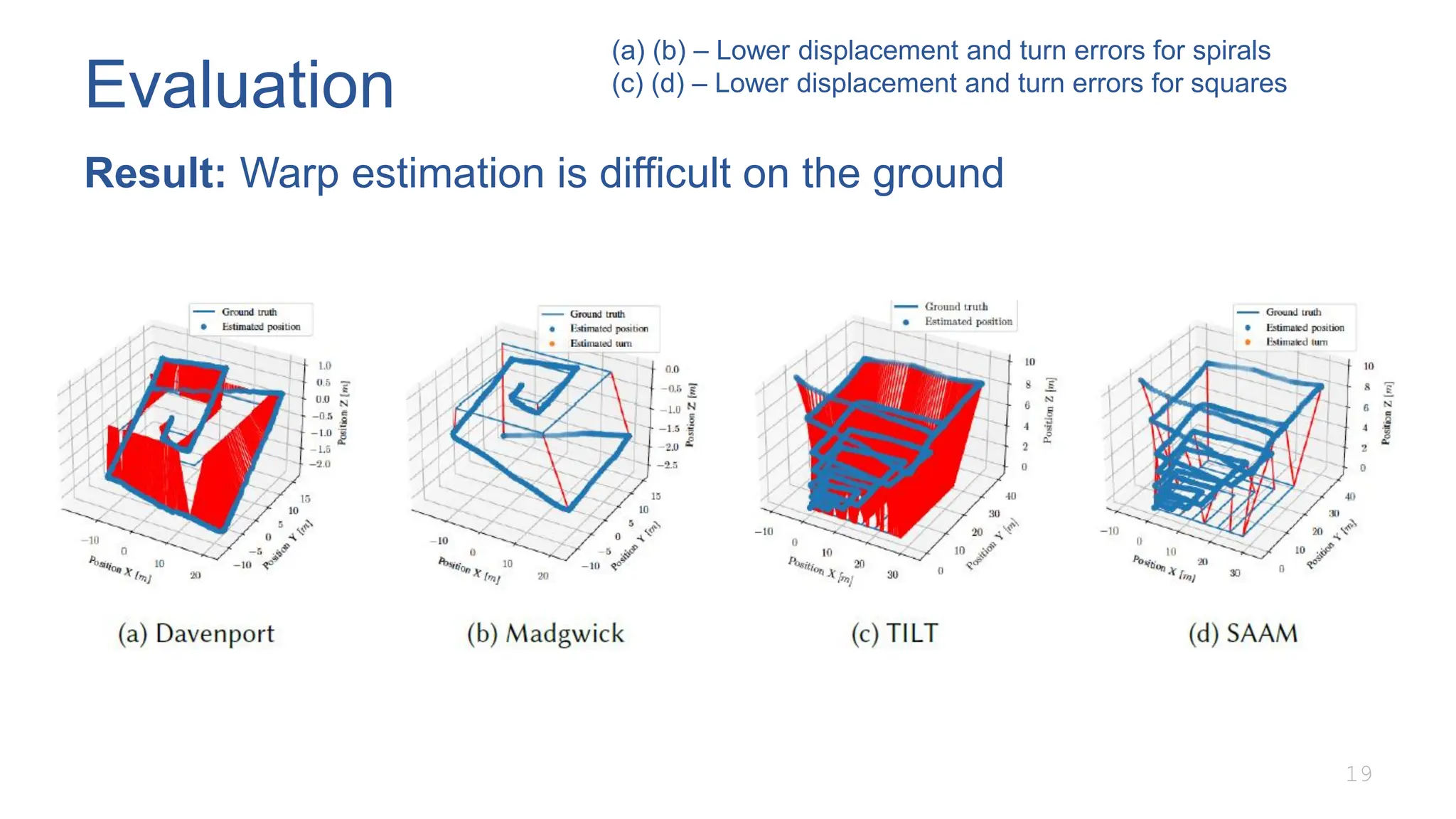
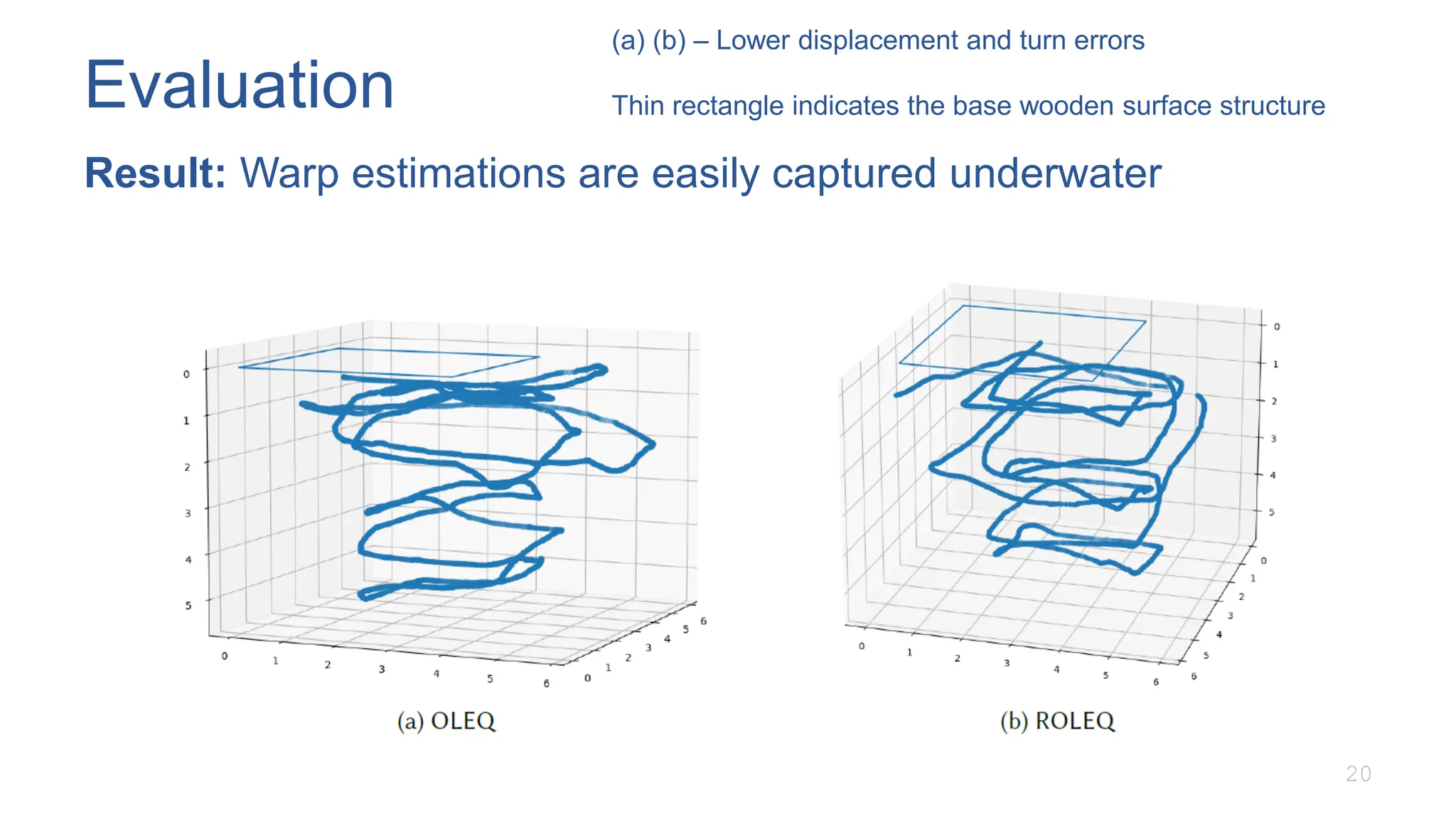

This document evaluates the performance of dead reckoning techniques for underwater navigation. It benchmarks 15 dead reckoning algorithms using an IMU and compares their accuracy on land versus underwater. The results show that displacement and attitude estimation errors are generally lower underwater compared to similar trajectories on land. Warp estimations like spirals and squares also have lower errors when performed underwater rather than on the ground. The document concludes that dead reckoning can be used underwater with around 5% error for displacement and turning, and its performance depends on the motion pattern and algorithm used.



































































