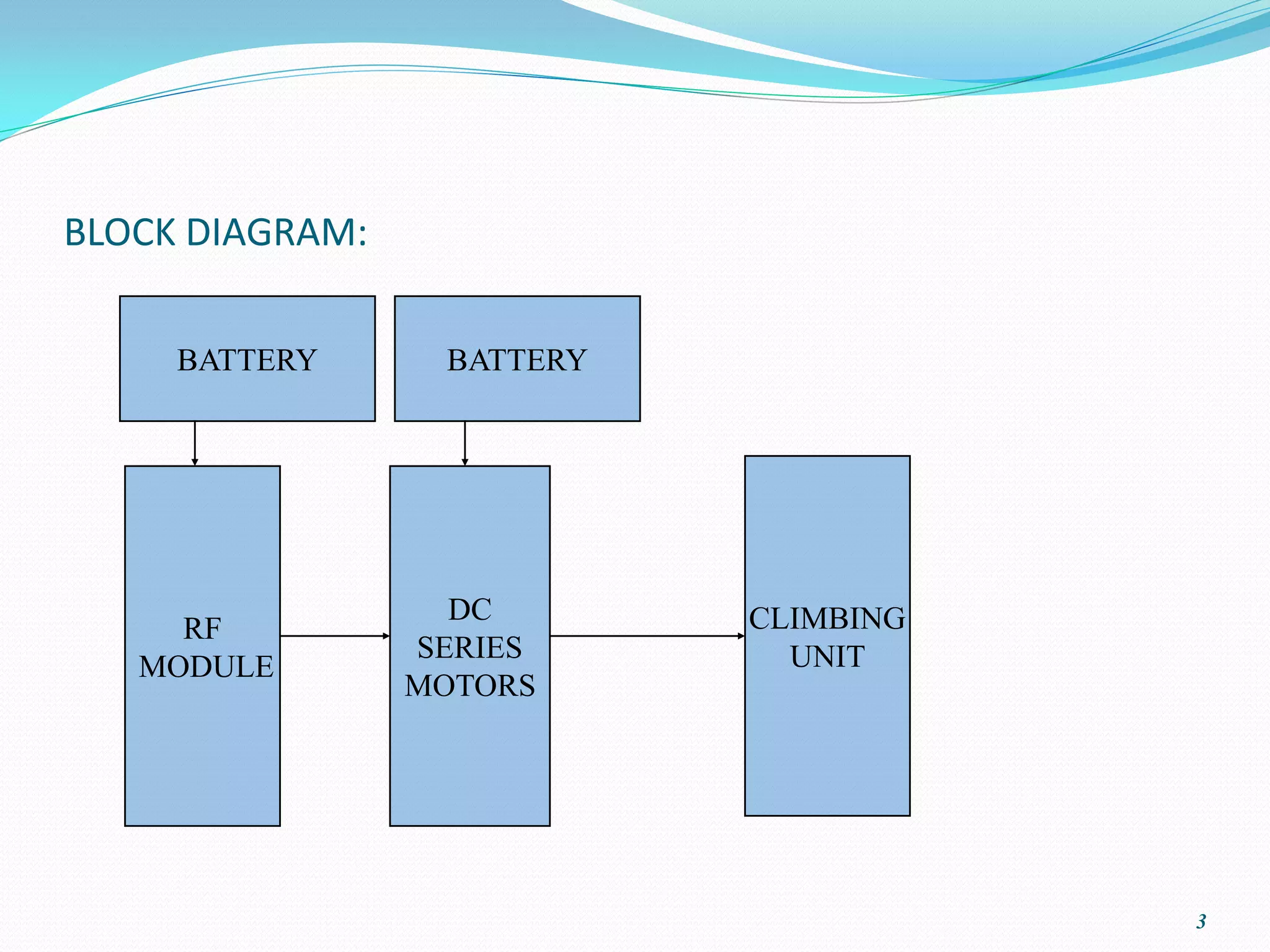
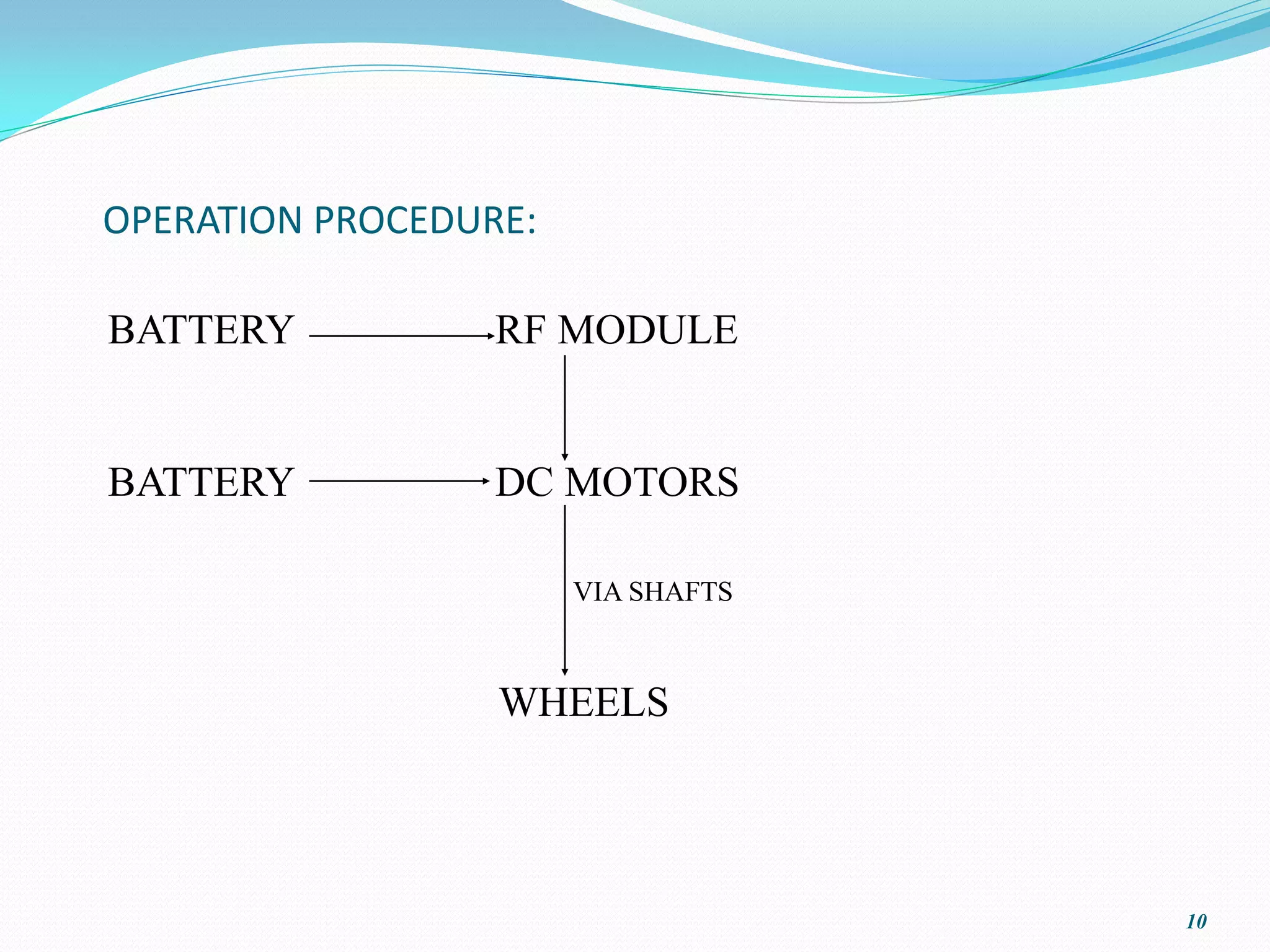
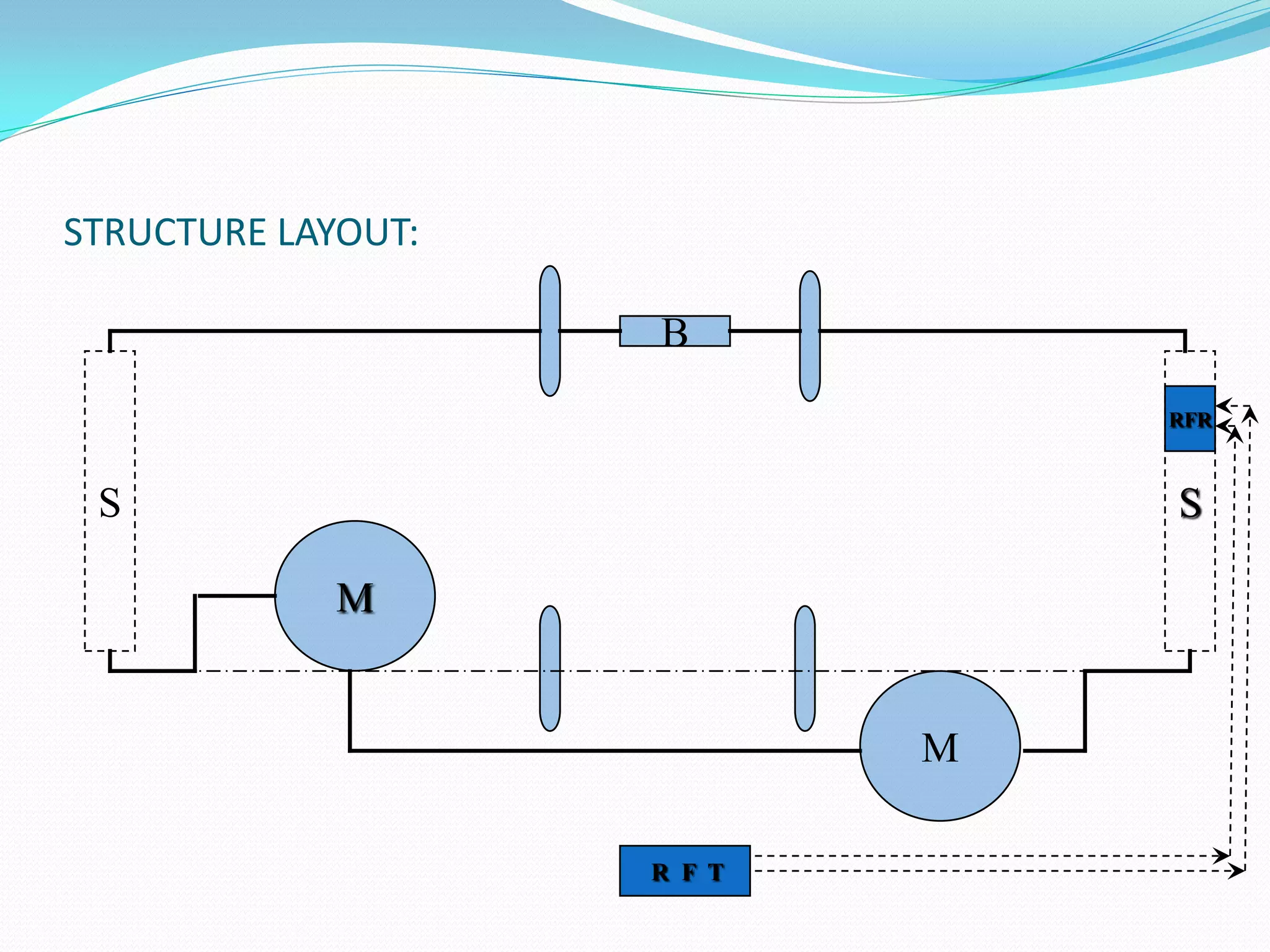
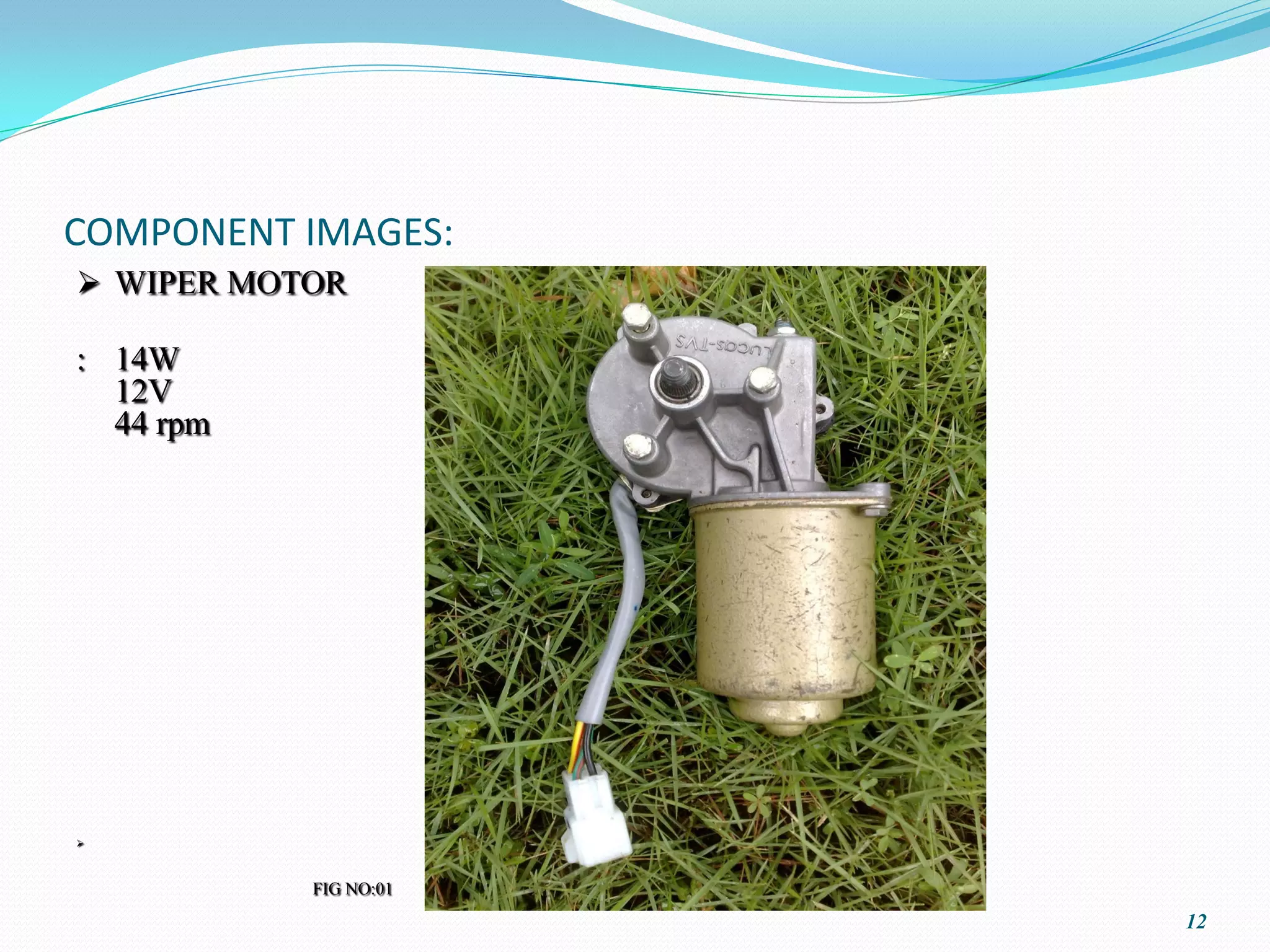
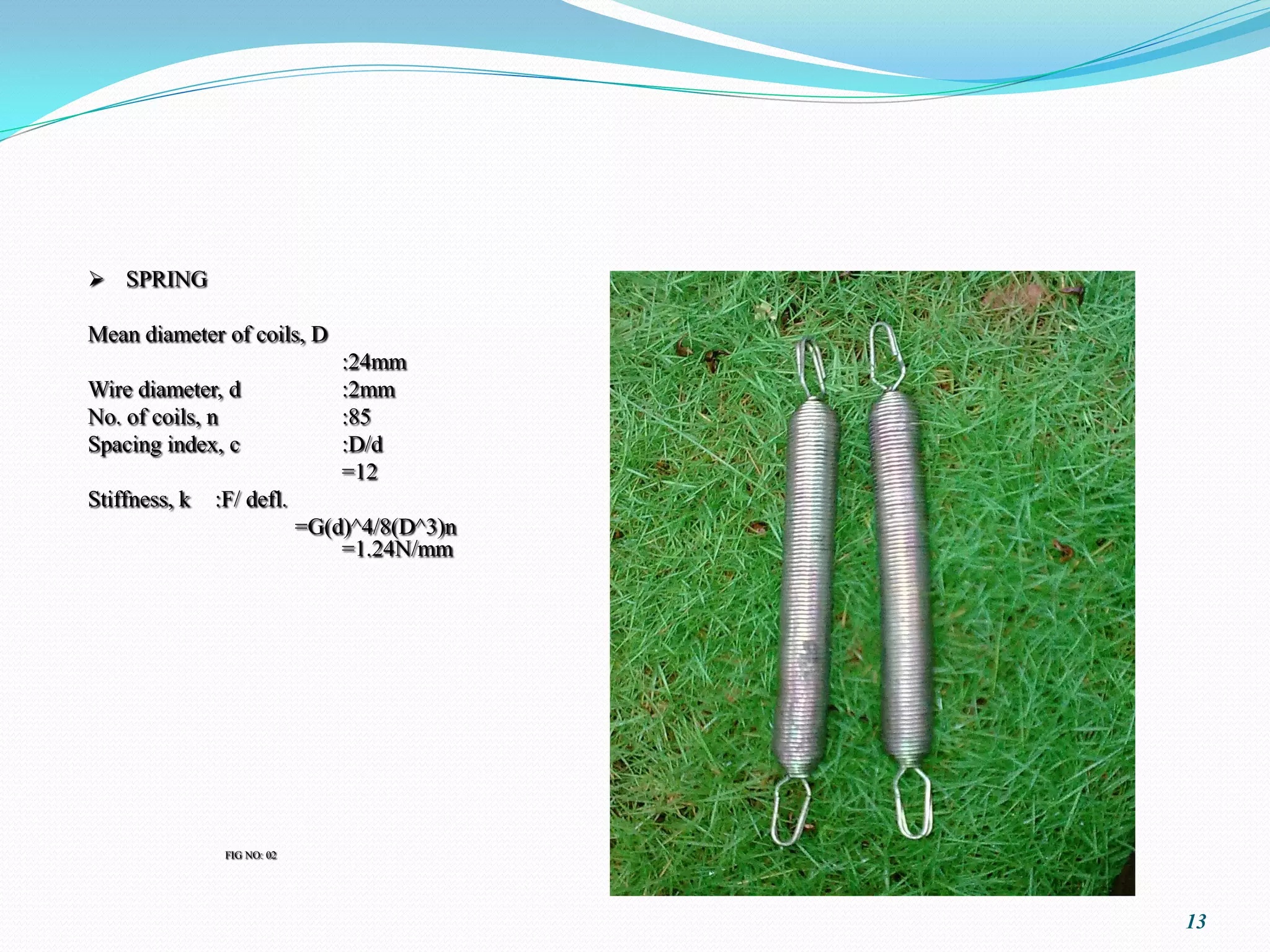
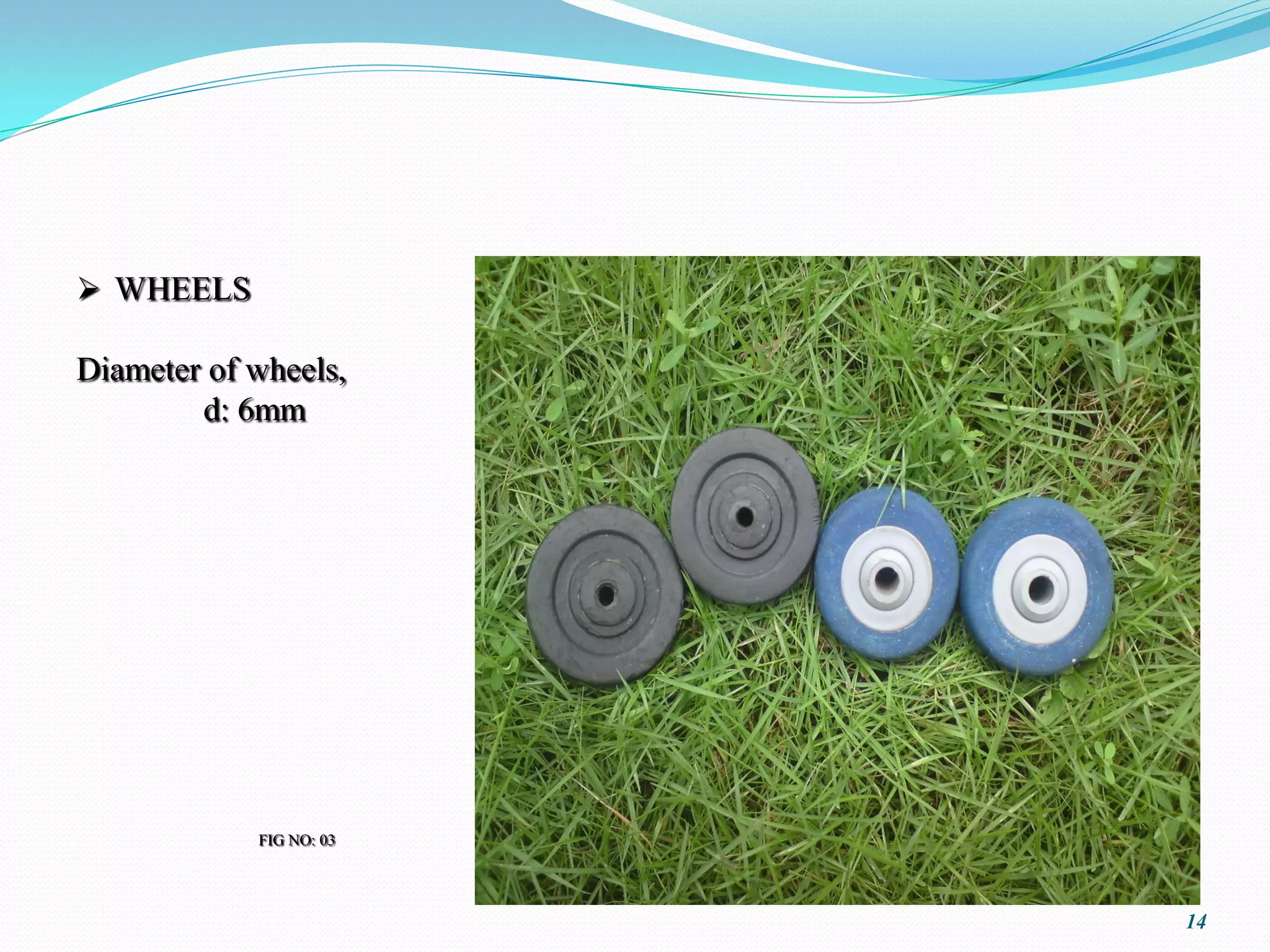
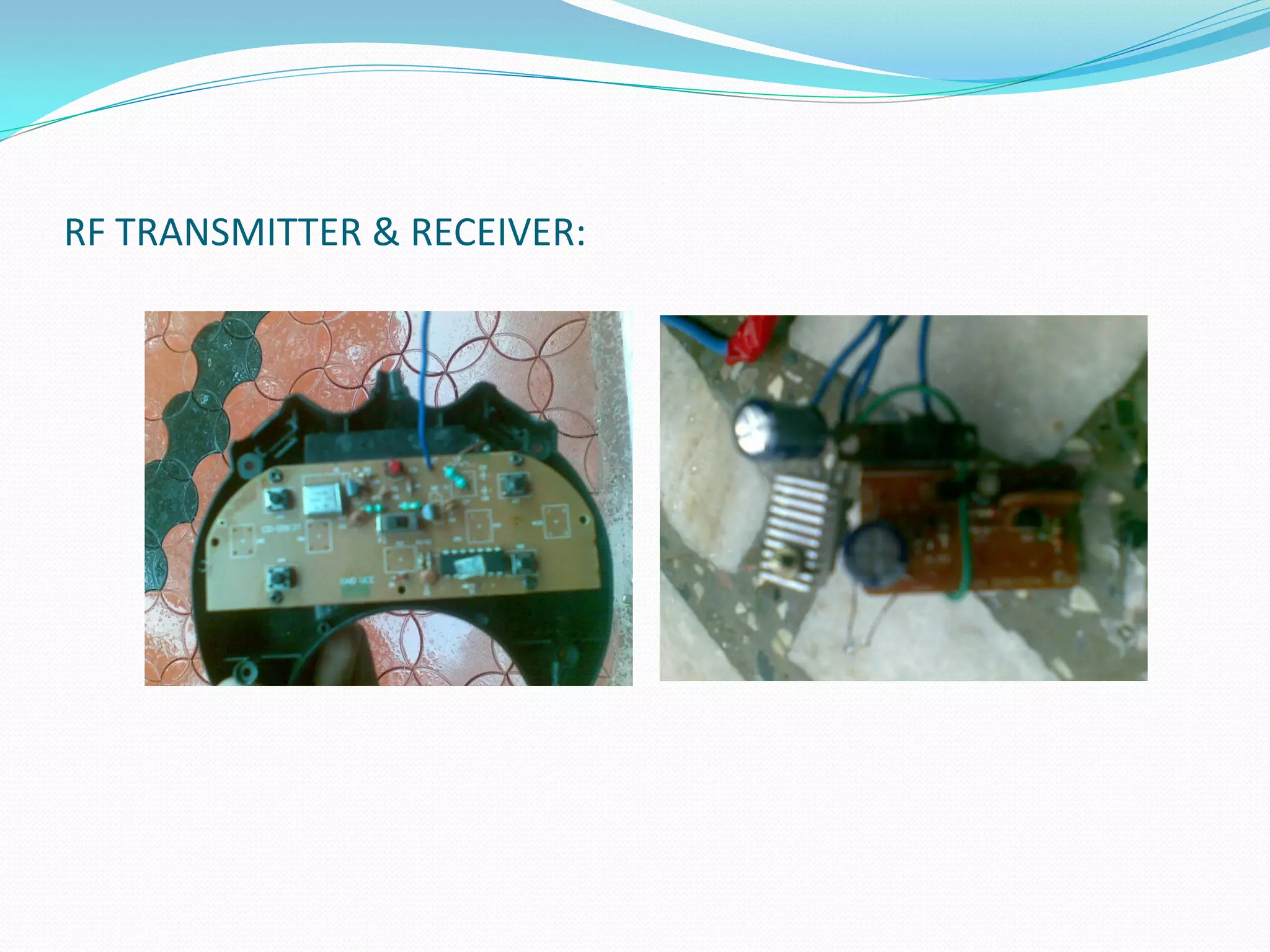
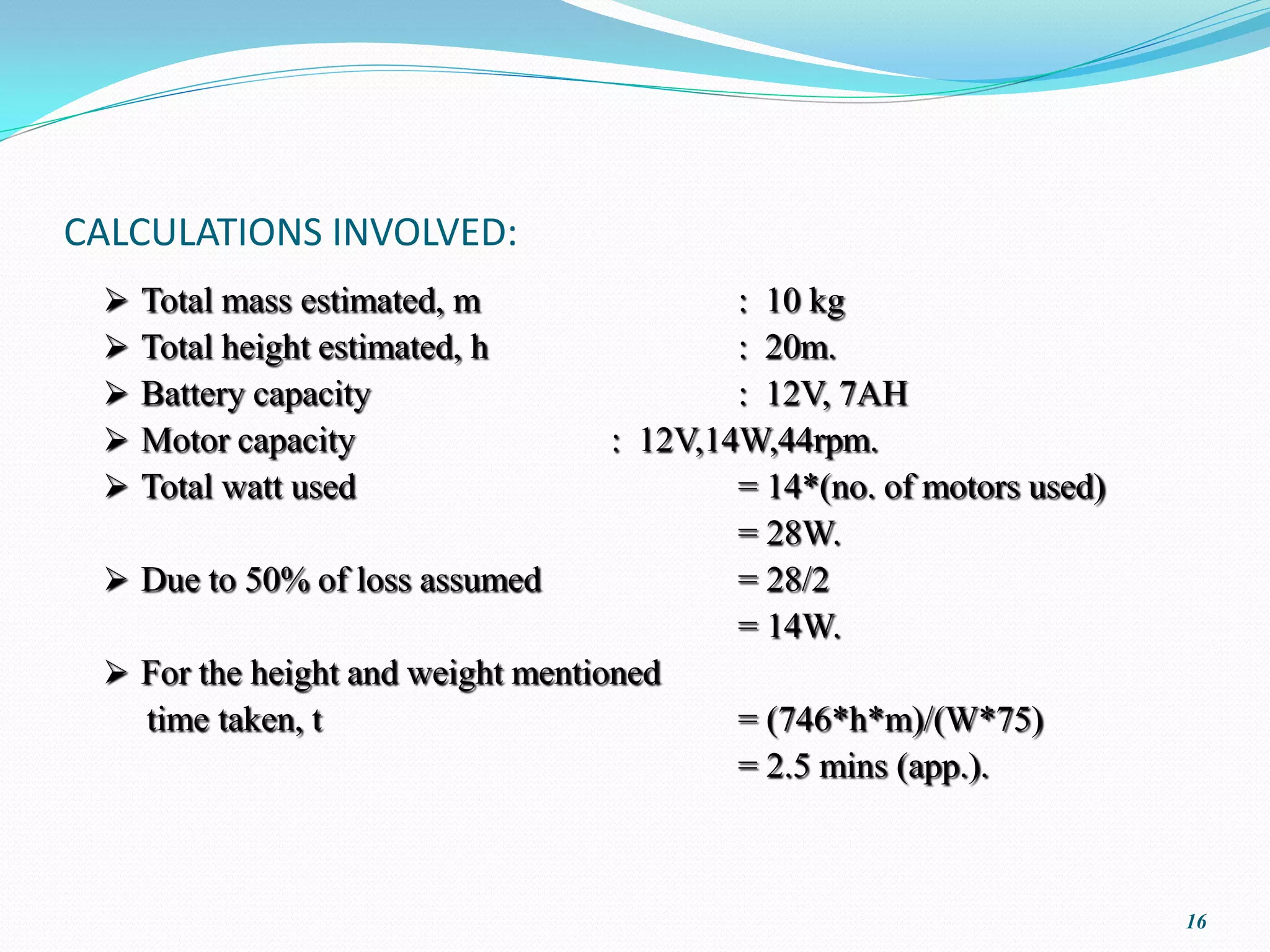

This document describes a remote controlled tree trunk climbing device. The goals are to enable applications that can help humans by moving up and down tree trunks. It uses an RF module, battery, DC motors, and a climbing unit with spring-loaded wheels. The RF module transmits signals to control the motors which power the wheels via shafts. Calculations were done to determine the optimal wheel diameter, motor RPM, and time to climb a tree of a given height and weight. The advantages are its light weight, low cost, use of rechargeable batteries, and ease of use. The main disadvantage is its inability to move sideways.














































![11.[38 48]performance evaluation of locally fabricated slipping machine for n...](https://cdn.slidesharecdn.com/ss_thumbnails/11-38-48performanceevaluationoflocallyfabricatedslippingmachinefornaturalrubberwoodprocessing-120512235811-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Chapter4_Initiation_of_Sediment_Motion_v2[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chapter4initiationofsedimentmotionv21-251208223747-f94ef163-thumbnail.jpg?width=640&height=640&fit=bounds)



![CleanMyMac X v5.2.8 Crack for MacOS Full Version [Latest] pptx](https://cdn.slidesharecdn.com/ss_thumbnails/softwareoverview-251207194121-a81f0142-thumbnail.jpg?width=640&height=640&fit=bounds)

![Moho Pro 14.4 Crack for MacOS Works Until 2050 [Latest] pptx](https://cdn.slidesharecdn.com/ss_thumbnails/softwareoverview-251207192639-797289c4-thumbnail.jpg?width=640&height=640&fit=bounds)

![Driver Easy Pro Key 7.1.0.2641 Full Mac Crack Free Activated Download [2026]....](https://cdn.slidesharecdn.com/ss_thumbnails/software-251207185324-b2fb71b4-thumbnail.jpg?width=640&height=640&fit=bounds)
![WinRAR Crack 7.13 Final Mac Keygen 2026 Download [Latest] Software.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/software-251207185858-eb450678-thumbnail.jpg?width=640&height=640&fit=bounds)









