Initial Focus:
Began with 1D, steady-state conduction without internal generation.
Progression:
Included multidimensional effects and internal heat generation.
New Focus:
Now considering time-dependent (transient) conduction.
Unsteady Conditions:
Caused by changes in boundary conditions.
Example: Hot metal billet exposed to cool air – temp. drops until steady
state.
Chapter Goal:
Determine temperature distribution over time.
Analyze heat transfer to/from solid during transient process.
The Lumped CapacitanceMethod
Problem: Transient conduction in a solid with sudden thermal change.
Example: Hot metal forging initially at temperature 𝑇𝑖.
Action: Quenched in liquid at lower temperature 𝑇∞ < 𝑇𝑖.
Start time: Quenching begins at = 0.
𝑡
Effect: Solid temperature drops over time > 0.
𝑡
Cause: Convection heat transfer at solid–liquid interface.
Lumped Capacitance Assumption: Temperature is uniform throughout
the solid at any time.
Internal temperature gradients are negligible.
The Lumped CapacitanceMethod
Fourier’s Law: Heat conduction needs a temperature gradient.
No gradient → Implies infinite thermal conductivity (not realistic).
Approximation: Valid if internal conduction resistance external
≪
convection resistance.
Assumption: Internal resistance is negligible for current analysis.
7.
The Lumped CapacitanceMethod
No internal gradients → Heat equation not applicable.Heat equation:
Governs spatial temperature distribution.
Alternative: Use overall energy balance on the solid.
Goal: Relate surface heat loss to internal energy change.
Approach: Apply Equation to control volume (Figure (slide 5)).
8.
The Lumped CapacitanceMethod
Equation :
Used to determine the time required for the solid to reach a specific
temperature T.
Equation :
Used to compute the temperature reached by the solid at a given time t.
Temperature difference between solid and fluid decays exponentially
as t → ∞.
This behavior is shown in Figure (next slide).
From Equation , the term (ρVc/hAs) represents the thermal time
constant.
The Lumped CapacitanceMethod
From Equation :
Rt = convection thermal resistance
Ct = lumped thermal capacitance
Higher Rt or Ct → slower thermal response
Analogous to voltage decay in an electrical RC circuit
To determine the total energy transfer Q occurring up to some time t,
we simply write
11.
The Lumped CapacitanceMethod
Substituting for θ from Equation and integrating, we obtain
The quantity Q is, of course, related to the change in the internal
energy of the solid, and from Equation
For quenching: Q > 0 → solid loses energy
For heating (θ < 0): Q < 0 → solid gains energy
Equations 5.5, 5.6, 5.8a apply to both cases.
12.
Validity of theLumped
Capacitance Method
Lumped capacitance method:
Simple and convenient for transient heat/cool problems
This section:
Defines conditions for accurate use of the method
13.
Validity of theLumped Capacitance
Method
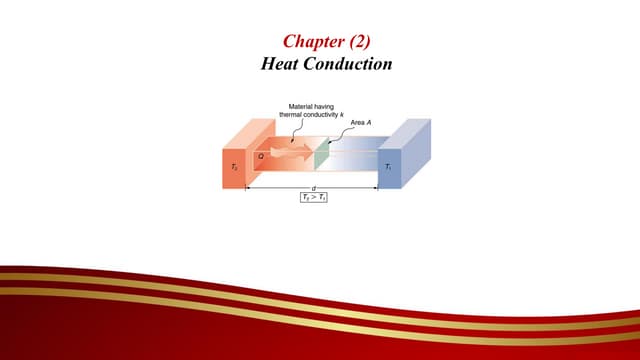
Consider steady-state conduction through a wall of area A (Figure
next slide)
Criterion applies to transient cases as well
One surface at Ts,1, other exposed to fluid at T∞ < Ts,1
Opposite surface reaches Ts,2, where T∞ < Ts,2 < Ts,1
Under steady-state, surface energy balance (Eq. 1.13) simplifies to:
Reduced form of Equation applies
14.
Validity of theLumped Capacitance
Method
where k is the thermal conductivity of the solid. Rearranging, we
then obtain
Effect of Biot number on steady-state temperature
distribution in a plane wall with surface convection.
15.
Validity of theLumped Capacitance
Method
(hL/k) in Equation = Biot number (Bi) is dimensionless; key in
conduction with convection
Bi measures:
Temp drop within solid vs. solid–fluid temp difference
Bi = ratio of thermal resistances (solid vs. fluid)
If Bi 1:
≪
Conduction resistance convection resistance→ Uniform
≪
temperature in solid is a valid assumption
16.
Validity of theLumped Capacitance
Method
Lumped capacitance method: simple, convenient for transient
heat transfer.
Useful for heating and cooling analysis.
Next: define conditions for accurate application.
17.
Effect of Biotnumber on steady-
state temperature distribution in a
plane wall with surface
convection.
18.
Validity of theLumped Capacitance
Method
Develop criterion via steady-state conduction through plane wall
(area A).
Criterion extends to transient processes.
One surface at temperature Ts,1.
Other surface exposed to fluid at T∞ (T∞ < Ts,1).
That surface reaches intermediate temperature Ts,2 (T∞ < Ts,2 < Ts,1).
Apply surface energy balance (Equation ) under steady-state.
19.
Validity of theLumped Capacitance
Method
where k is the thermal conductivity of the solid. Rearranging, we
then obtain
20.
Validity of theLumped Capacitance
Method
Biot number (Bi = hL/k) is dimensionless.
Key in conduction with surface convection.
Measures temperature drop inside solid vs. surface-fluid difference.
Also represents ratio of thermal resistances:
Conduction (solid) vs. convection (fluid).
If Bi << 1:
Conduction resistance convection resistance.
≪
Uniform temperature in solid is a valid assumption.
21.
Validity of theLumped Capacitance
Method
Biot number also key in transient conduction.
Consider a plane wall:
Initial temp Ti, fluid temp T∞ < Ti.
Cooling by convection, 1D heat transfer.
Temperature T(x, t) depends strongly on Bi.
Bi << 1:
Small internal gradients.
T(x, t) ≈ T(t) → uniform solid temperature.
Temp drop mainly at surface-fluid interface.
22.
Validity of theLumped Capacitance
Method
Bi ≥ 1:
Significant internal gradients.
Must use T = T(x, t).
Bi >> 1:
Large temp drop inside solid.
Small drop across fluid layer.
23.
Validity of theLumped Capacitance
Method
Biot number relevance: Important in transient conduction problems.
Setup:
Plane wall, initially at Ti, exposed to fluid at T∞ < Ti.
Assumption:
One-dimensional heat flow in x-direction.
Goal:
Analyze T(x, t) — temperature variation over position and time.
Bi << 1:
Small internal temperature gradients.
Approximate as T(x, t) ≈ T(t) (uniform solid temperature).
Major temperature drop across fluid–solid interface.
24.
Validity of theLumped Capacitance
Method
Moderate to high Bi:
Significant internal temperature gradients.
Must solve T = T(x,t).
Bi >> 1:
Large temperature difference within solid.
Smaller difference between surface and fluid.
25.
Validity of theLumped Capacitance
Method
Lumped capacitance method:
Preferred for transient heating/cooling.
Known for simplicity.
First step:
Calculate Biot number (Bi).
If Bi ≤ 0.1:
Lumped method is valid.
Use T(t) instead of T(x, t).
26.
Validity of theLumped Capacitance
Method
Transient temperature distributions for different Biot numbers in a plane
wall symmetrically cooled by convection.
27.
Validity of theLumped Capacitance
Method
Lumped method error:
Small if Bi ≤ 0.1.
Characteristic length (Lc):
Defined as Lc = V / As (volume/surface area).
Simplifies shape handling.
Special cases:
Plane wall (thickness 2L):
Lc = L.
Long cylinder:
Lc = ro / 2.
Sphere:
Lc = ro / 3.
28.
Validity of theLumped Capacitance
Method
Finally, we note that, with Lc ≡ V/As, the exponent of Equation may
be expressed as
It is a dimensionless time, which, with the Biot number, characterizes transient
conduction problems.
34.
General Lumped Capacitance
Analysis
Transient conduction often starts from convection with an adjoining
fluid.
Other causes include:
Radiation: from large surroundings across gas or vacuum.
Surface heat flux: applied to part or all of the surface.
Internal heat generation: within the solid itself.
Examples:
Surface heating via sheet/film electrical heater.
Internal heating via electrical current through the solid.
35.
General Lumped Capacitance
Analysis
Figure: Shows combined effects on a solid's thermal state from:
Convection
Radiation
Surface heat flux 𝑞𝑠
”
Internal energy generation ˙
𝑞
Control surface for general lumped
capacitance analysis
36.
General Lumped Capacitance
Analysis
Initial condition (at =0):
𝑡
Solid temperature 𝑇𝑖 ≠ fluid temperature 𝑇∞ and surroundings 𝑠𝑢𝑟
Heating sources initiated:
Surface heat flux 𝑞𝑠′′
Volumetric generation ˙
𝑞
Surface interactions:
Heat flux 𝑞𝑠′′ on surface area 𝐴 ( )
𝑠 ℎ
Convection & radiation on 𝐴 ( , )
𝑠 𝑐 𝑟
Convection-radiation assumed from surface only
Surfaces may differ: , ≠ ,
𝐴𝑠 𝑐 𝐴𝑠 𝑟
Energy conservation applied at any time t using Equation +
𝑡
General Lumped Capacitance
Analysis:Radiation Only
If there is no imposed heat flux or generation and convection is
either nonexistent (a vacuum) or negligible relative to radiation,
Equation reduces to
Separating variables and integrating from the initial condition to
any time t, it follows that
39.
General Lumped Capacitance
Analysis:Radiation Only
Evaluating both integrals and rearranging, the time required to
reach the temperature T becomes
40.
General Lumped Capacitance
Analysis:Radiation Only
Expression estimates time for solid to reach temperature
Equation 5.17 can be integrated.
Limiting caseT. : Tsur = 0 (radiation to deep space).
Yields simplified result for this condition.
41.
General Lumped Capacitance
Analysis:Negligible Radiation
Exact solution possible if:Radiation neglected
All variables (except T) time-independent
Define: Temperature difference: θ ≡ T − T∞
Time derivative: dθ/dt = dT/dt
Result:
Equation reduces becomes linear, first-order, nonhomogeneous ODE
Finite-Difference Methods
Analyticalmethods solve some 2D steady conduction
problems.
Applicable to simple geometries and boundary conditions.
Solutions are well documented in literature [1–5].
Most 2D problems are too complex for analytical solutions.
Numerical methods (finite-difference, finite-element, boundary-
element) are preferred.
Numerical methods extend easily to 3D problems.
Finite-difference method is simple and ideal for beginners.
Bowman, R. A., A. C. Mueller, and W. M. Nagle, Trans. ASME, 62, 283, 1940.
2Standards of the Tubular Exchange Manufacturers Association, 6th ed., Tubular Exchange Manufacturers Association, New York, 1978.
Jakob, M., Heat Transfer, Vol. 2, Wiley, New York, 1957.
Kays, W. M., and A. L. London, Compact Heat Exchangers, 3rd ed., McGraw-Hill, New York, 1984.
Kakac, S., A. E. Bergles, and F. Mayinger, Eds., Heat Exchangers, Hemisphere Publishing, New York, 1981.
44.
Finite-Difference Methods
Analyticalsolutions suit simple geometries and boundary conditions
(e.g., 1D cases).
Some 2D/3D cases allow analytical solutions.
Complex geometries or boundaries require numerical methods.
Finite-difference/element methods are alternatives.
This section covers explicit and implicit finite-difference methods for
transient conduction.
45.
Discretization of theHeat Equation:
The Explicit Method
Consider the 2D system from Figure (Below).
Conditions: transient, constant properties, no internal heat
generation.
Use heat equation form from Equation ++.
46.
Discretization of theHeat Equation:
The Explicit Method
Use central-difference approximations for spatial derivatives (Eqs. &
).
Subscripts , : x- and y-direction nodal positions.
𝑚 𝑛
Discretize both space and time.
Introduce integer : time step index.
𝑝
47.
Discretization of theHeat Equation:
The Explicit Method
The finite-difference approximation to the time derivative in Equation is
expressed as
Superscript : denotes time level of temperature
𝑝 𝑇
Time derivative: approximated by difference between 𝑇 +1
𝑝 and Calculations
𝑇𝑝
done step-by-step at time intervals ΔT
Like space, temperature is computed only at discrete time points
Solution restricted to grid points in space and time
49.
Discretization of theHeat Equation:
The Explicit Method
Eq. =→ substituted into Eq.
Solution form depends on time level used for spatial derivatives
Explicit method: evaluates temperatures at previous time 𝑝
So, Eq. = = forward-difference in time
Spatial derivatives (Eqs. & ) also evaluated at time 𝑝
Substituting all into Eq.→ gives explicit finite-difference equation for interior node
( , )
𝑚 𝑛
50.
Discretization of theHeat Equation:
The Explicit Method
Solving for the nodal temperature at the new (p + 1) time and assuming that ∆x =
∆y, it follows that
where Fo is a finite-difference form of the Fourier number
If the system is one-dimensional in x, the explicit form of the finite-difference
equation for an interior node m reduces to
51.
Discretization of theHeat Equation:
The Explicit Method
Equations and are explicit: new temperatures depend only on
known previous values.
Initial temperatures at all interior nodes are known at t = 0 (p =
0).Calculations start at t = ∆t (p = 1) using Eq. 5.79 or 5.81 for each
node.
With temperatures at t = ∆t known, apply equations to get values at
t = 2∆t (p = 2).
Process continues step-by-step in time using time interval ∆t.
Transient temperature distribution is built by marching forward in
time.
52.
Discretization of theHeat Equation:
The Explicit Method
Accuracy improves by reducing ∆x and ∆t.
Smaller ∆x → more nodes; smaller ∆t → more time steps.
Computation time increases with smaller ∆x and ∆t.
∆x is a trade-off between accuracy and computation.
Once ∆x is set, ∆t is chosen for stability, not arbitrarily.
53.
Discretization of theHeat Equation:
The Explicit Method
Explicit method is not unconditionally stable.
In transient problems, temperatures should approach steady state
over time.
Explicit method may cause oscillations — not physical, may lead to
instability.
Instability causes divergence from actual solution.
To avoid divergence, ∆t must stay below a certain limit.
54.
Discretization of theHeat Equation:
The Explicit Method
Limit depends on ∆x and system parameters — called stability
criterion.
Criterion derived mathematically or via thermodynamics (e.g.,
Problem 5.87).
For 1D interior node: (1 − 2Fo) ≥ 0 must be satisfied.
For prescribed values of ∆x and α, these criteria may be used to
determine upper limits to the value of ∆t.
55.
Discretization of theHeat Equation:
The Explicit Method
Equations and can be derived using the energy balance method
(Section 4.4.3).
Apply energy balance to a control volume around an interior
node.
Include thermal energy storage changes.
Leads to a general energy balance equation form.
As in Section 4.4.3, we will assume that all heat flow is into the node
in the following derivations of the finite difference equations.
56.
Surface node withconvection and one-dimensional transient conduction.
57.
Discretization of theHeat Equation:
The Explicit Method
Use Equation for the surface node in a 1D system (see Figure
(Previous slide)).
Node spacing is equal; surface node has half the thickness of
interior nodes.
Assume convection from fluid and no heat generation.
Equation simplifies accordingly for surface energy balance.
58.
Discretization of theHeat Equation:
The Explicit Method
or, solving for the surface temperature at t + ∆t
59.
Discretization of theHeat Equation:
The Explicit Method
To ensure stability, require coefficient of T ≥ 0.
₀ᵖ
This condition helps prevent numerical instability.
Leads to the stability criterion for the method.
60.
Discretization of theHeat Equation:
The Explicit Method
Full solution uses Eq. (interior nodes) and (surface node).
Compare Eq. vs. to find stricter stability limit.
Since Bi ≥ 0, Fo limit from Eq. < o.
Use Eq. to set maximum Fo and ∆t for stability.
Table (next slide) lists explicit equations for common geometries.
Each derived via energy balance on control volume.
For practice, verify at least one equation from the table.
61.
Discretization of theHeat Equation:
The Implicit Method
In explicit finite-difference schemes:
Temperature at time +
𝑡 Δ𝑡 depends only on known values at time .
𝑡
Each node’s temperature is computed independently of others at
+
𝑡 Δ𝑡.
Advantage:
Simple and computationally convenient.
Limitation:
Stability requires small Δ𝑡 for a given space step.
Often needs many time steps → high computational cost.
62.
Discretization of theHeat Equation:
The Implicit Method
Implicit Scheme:
Can reduce computation time.
Uses backward-difference (Equation ).
All temps evaluated at new time ( +1).
𝑝
More stable than explicit method.
Suitable for larger Δ .
𝑡
Equation is then considered to provide a backward-difference
approximation to the time derivative.
In contrast to Equation + , the implicit form of the finite difference
equation for the interior node of a two-dimensional system is then
63.
Discretization of theHeat Equation:
The Implicit Method
In contrast to Equation + , the implicit form of the finite difference
equation for the interior node of a two-dimensional system is then
Discretization of theHeat Equation:
The Implicit Method
Eq. B: New temperature at (m, n) depends on adjoining nodes' new
temperatures.
These neighboring node temperatures are generally unknown.
Must solve all nodal equations simultaneously for time step +1.
𝑝
Use matrix inversion or Gauss–Seidel iteration (see Sec. 4.5 i.e., Solving
the Finite-Difference Equations, App. D).
Marching solution: Solve at =
𝑡 Δ ,2Δ ,…
𝑡 𝑡 … until final time.
66.
Discretization of theHeat Equation:
The Implicit Method
Implicit method is unconditionally stable.
All coefficients of are positive.
No restrictions on Δ𝑥 and Δ𝑡.
Larger Δ𝑡 → faster computation, minimal accuracy loss.
To ensure accuracy, use small enough Δ𝑡 so results don’t change with
further reductions.
67.
Discretization of theHeat Equation:
The Implicit Method
The implicit form of a finite-difference equation may also be derived
from the energy balance method.
For the surface node of Figure , it is readily shown that
68.
Discretization of theHeat Equation:
The Implicit Method
For any interior node of Figure, it may also be shown that




































![Finite-Difference Methods
Analytical methods solve some 2D steady conduction
problems.
Applicable to simple geometries and boundary conditions.
Solutions are well documented in literature [1–5].
Most 2D problems are too complex for analytical solutions.
Numerical methods (finite-difference, finite-element, boundary-
element) are preferred.
Numerical methods extend easily to 3D problems.
Finite-difference method is simple and ideal for beginners.
Bowman, R. A., A. C. Mueller, and W. M. Nagle, Trans. ASME, 62, 283, 1940.
2Standards of the Tubular Exchange Manufacturers Association, 6th ed., Tubular Exchange Manufacturers Association, New York, 1978.
Jakob, M., Heat Transfer, Vol. 2, Wiley, New York, 1957.
Kays, W. M., and A. L. London, Compact Heat Exchangers, 3rd ed., McGraw-Hill, New York, 1984.
Kakac, S., A. E. Bergles, and F. Mayinger, Eds., Heat Exchangers, Hemisphere Publishing, New York, 1981.](https://image.slidesharecdn.com/transientflow-251108212457-687ce801/75/Transient-flow-in-heat-transfer-Unsteady-state-pptx-43-2048.jpg)