The document presents a case study on the application of consumer-off-the-shelf (COTS) devices, specifically Myo and Sphero, for human motion analysis. It details the software and hardware development processes, mathematical methods for data handling, and experiments conducted for motion analysis. The study emphasizes advantages such as low cost and accessibility, along with challenges related to data quality and technical requirements.



![Mark Tomaszewski13 January 2017 Slide 9 of 64
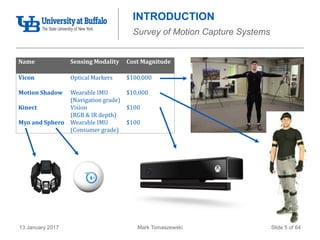
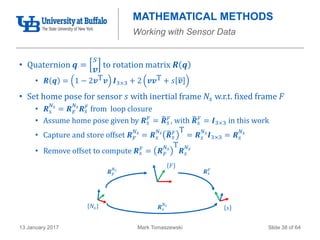
BACKGROUND
Myo and Sphero Hardware
Myo [1] (Thalmic Labs)
• Cortex M4 MCU
• MPU-9150 IMU (9 axis + DMP)
• 8 electromyography (EMG)
• Bluetooth Low Energy (BLE)
Sphero[2] (Sphero/Orbotix)
• Cortex M4 MCU
• Bosch BMI055 IMU (6 axis)
• Motors & Motor Driver
• Bluetooth Classic
Main board and batteries
EMG
IMUMCU
Bluetooth module
Motors
MCU
IMU
Motor driver](https://image.slidesharecdn.com/tomaszewskimarkthesisslidesfinal-170207032659/85/Tomaszewski-Mark-Thesis-Slides-Application-of-Consumer-Off-The-Shelf-COTS-Devices-to-Human-Motion-Analysis-9-320.jpg)
![Mark Tomaszewski13 January 2017 Slide 11 of 64
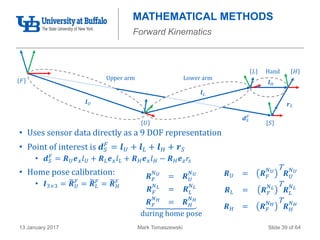
BACKGROUND
Myo Software – Development Ecosystem
Operating System Language Dependencies Supported By
Windows C++ Myo SDK
runtime library
Thalmic Labs
Mac OS X C++ Myo SDK
framework
Thalmic Labs
iOS Objective-C MyoKit
framework
Thalmic Labs
Android Java Java Library Thalmic Labs
Windows C#, .NET --- Community
Linux C, C++, Python --- Community
Mac OS X Objective-C --- Community
--- Unity, Python,
Javascript, Ruby, Go,
Haskell, Processing,
Delphi, ROS, Arduino,
MATLAB
--- Community
Software developed by Thalmic Labs [3] and Community [4] sources.](https://image.slidesharecdn.com/tomaszewskimarkthesisslidesfinal-170207032659/85/Tomaszewski-Mark-Thesis-Slides-Application-of-Consumer-Off-The-Shelf-COTS-Devices-to-Human-Motion-Analysis-11-320.jpg)
![Mark Tomaszewski13 January 2017 Slide 12 of 64
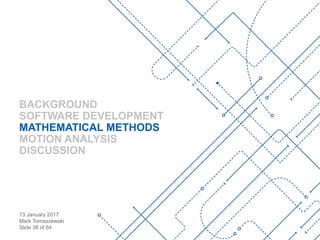
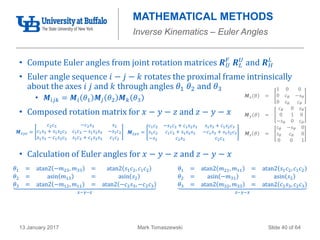
BACKGROUND
Myo Software – Middleware Stack
Myo Device
(Embedded Host Device)
Application Computer
(Windows Client PC)
Platform SDK API
Middleware
Low-Level API Middleware
MATLAB Interface
Embedded Application
Bluetooth Radio
Bluetooth Dongle
(BLED112 Driver)
Myo Connect
(Desktop Application)
Myo SDK
(libmyo / C++ Bindings)
Myo SDK Implementation
Myo Data Provider
Bluetooth Radio
Bluetooth Library
Myo Data Consumer
myo_mex (MATLAB MEX Wrapper)
MyoMex Device Manager (MATLAB Class)
MyoData Device Data Interface (MATLAB Class)
User Software Vendor Software
Bluetooth Protocol [5]
Bluetooth Protocol [5]](https://image.slidesharecdn.com/tomaszewskimarkthesisslidesfinal-170207032659/85/Tomaszewski-Mark-Thesis-Slides-Application-of-Consumer-Off-The-Shelf-COTS-Devices-to-Human-Motion-Analysis-12-320.jpg)
![Mark Tomaszewski13 January 2017 Slide 13 of 64
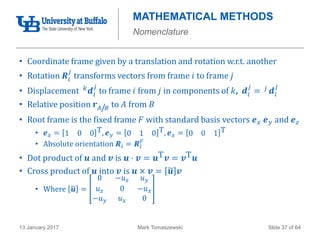
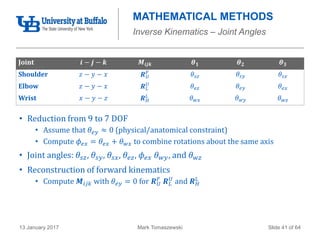
BACKGROUND
Myo Software – API selection
Advantages Disadvantages
Myo SDK Vendor support
Hardware included with Myo
No EMG data with multiple
Myo devices
BLE Protocol Free choice for all hardware and
software
Code volume and complexity
Not as easily deployable
Platform SDK API Middleware
MATLAB Interface
Myo SDK Implementation
myo_mex (MATLAB MEX Wrapper)
MyoMex Device Manager (MATLAB Class)
MyoData Device Data Interface (MATLAB Class)
Myo SDK MATLAB MEX Wrapper [6,7]](https://image.slidesharecdn.com/tomaszewskimarkthesisslidesfinal-170207032659/85/Tomaszewski-Mark-Thesis-Slides-Application-of-Consumer-Off-The-Shelf-COTS-Devices-to-Human-Motion-Analysis-13-320.jpg)
![Mark Tomaszewski13 January 2017 Slide 14 of 64
BACKGROUND
Sphero Software – Support
Operating System Language Dependencies Supported By
iOS Objective-C RobotKit SDK framework Sphero
iOS Swift RobotKit SDK framework Sphero
Android Java RobotLibrary SDK jar library Sphero
--- Javascript Source code Community
Sphero Embedded Device
MATLAB Interface Application Computer
(Mobile Host Device)
Embedded Application
Bluetooth Radio
Sphero (MATLAB Class)
SpheroCore (MATLAB Class)
Sphero Low-Level Protocol
SpheroInterface (MATLAB Class)
ICInterface/Bluetooth (MATLAB Class)
MATLAB Instrument Control Toolbox
Android / iOS SDKs
User Software Vendor SoftwareBluetooth Protocol [8]
Sphero API MATLAB SDK [9,10]](https://image.slidesharecdn.com/tomaszewskimarkthesisslidesfinal-170207032659/85/Tomaszewski-Mark-Thesis-Slides-Application-of-Consumer-Off-The-Shelf-COTS-Devices-to-Human-Motion-Analysis-14-320.jpg)

![Mark Tomaszewski13 January 2017 Slide 16 of 64
onRssi
onLock
onUnlock
onPair
onUnpair
onArmSync
onArmUnsync
onConnect
onDisconnect
onBatteryLevelReceived
onWarmupCompleted
onOrientationData
onAccelerometerData
onGyroscopeData
onEmgData
onPose
Callbacks
SOFTWARE DEVELOPMENT
Myo SDK [11] Concepts
• Event based API
• Application class DataCollector collector;
• Inherits from myo::DeviceListener
• Implement callbacks for data events,
e.g. DataCollector::onEmgData(...,int8_t* emg)
• Register collector as a listener to myo::Hub* pHub;
• pHub->addListener(&collector);
• The hub calls back into collector with new events
• Run the hub to trigger callbacks
• pHub->run(duration) or pHub->runOnce(timeout)
• Boring details not shown here…
• Boilerplate, error/validation checking, exception handling, etc.](https://image.slidesharecdn.com/tomaszewskimarkthesisslidesfinal-170207032659/85/Tomaszewski-Mark-Thesis-Slides-Application-of-Consumer-Off-The-Shelf-COTS-Devices-to-Human-Motion-Analysis-16-320.jpg)


![Mark Tomaszewski13 January 2017 Slide 23 of 64
SOFTWARE DEVELOPMENT
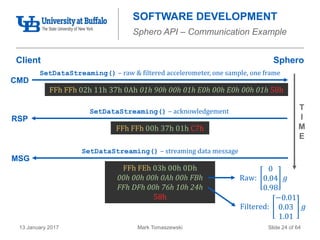
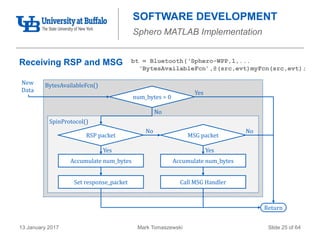
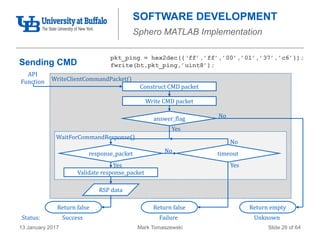
Sphero API [12] Concepts
• Bluetooth SPP = stream of bytes
• Bluetooth protocol: packet structure
• Command (CMD): Client Sphero sets response behavior
• Response (RSP): Sphero Client only in response to a CMD
• Message (MSG): Sphero Client asynchronous
• Examples: Ping(), SetRGBLEDOutput(). Roll(),
ReadLocator(), SetDataStreaming()
Packet Header Body CRC
CMD SOP1 SOP2 DID CID SEQ DLEN <DATA> CHK
RSP SOP1 SOP2 MRSP SEQ DLEN <DATA> CHK
MSG SOP1 SOP2 ID CODE DLEN
MSB
DLEN
LSB
<DATA> CHK](https://image.slidesharecdn.com/tomaszewskimarkthesisslidesfinal-170207032659/85/Tomaszewski-Mark-Thesis-Slides-Application-of-Consumer-Off-The-Shelf-COTS-Devices-to-Human-Motion-Analysis-23-320.jpg)





![Mark Tomaszewski13 January 2017 Slide 62 of 64
REFERENCES
[1] B. Stern, "Inside Myo | Myo Armband Teardown | Adafruit Learning System," Adafruit Industries, 3 February 2016. [Online]. Available:
https://learn.adafruit.com/myo-armband-teardown/inside-myo. [Accessed 6 January 2017].
[2] E. White, "Disassembling BB8 (Part 2) | element14 | chriswhite," Element 14: A Premier Farnell Company, 17 September 2015. [Online].
Available: https://www.element14.com/community/blogs/linker/2015/09/17/disassembling-bb8-part2. [Accessed 6 January 2017].
[3] developer.thalmic.com, "Thalmic Labs - Maker of Myo gesture control armband," Thalmic Labs, 2016. [Online]. Available:
https://developer.thalmic.com/downloads. [Accessed 8 December 2016].
[4] developer.thalmic.com, "Thalmic Labs Developer Forum / Tools and Bindings / List of Unofficial Tools and Bindings," Thalmic Labs, 2016.
[Online]. Available: https://developer.thalmic.com/forums/topic/541/. [Accessed 8 December 2016].
[5] thalmiclabs, "myo-bluetooth/myohw.h at master · thalmiclabs/myo-bluetooth," 28 September 2015. [Online]. Available:
https://github.com/thalmiclabs/myo-bluetooth/blob/master/myohw.h. [Accessed 8 December 2016].
[6] M. Tomaszewski, "Myo SDK MATLAB MEX Wrapper," The MathWorks, Inc., 7 March 2016. [Online]. Available:
https://www.mathworks.com/matlabcentral/fileexchange/55817-myo-sdk-matlab-mex-wrapper. [Accessed 7 January 2017].
[7] M. Tomaszewski, "mark-toma/MyoMex: Access data from Thalmic Labs' Myo Gesture Control Armband in m-code!," GitHub, 20 November
2016. [Online]. Available: https://github.com/mark-toma/MyoMex. [Accessed 26 December 2016].
[8] Orbotix, "Sphero API 1.50," 20 August 2013. [Online]. Available:
https://github.com/orbotix/DeveloperResources/blob/master/docs/Sphero_API_1.50.pdf. [Accessed 8 January 2017].
[9] M. Tomaszewski, "Sphero API MATLAB SDK - File Exchange - MATLAB Central," The MathWorks, Inc., 30 August 2015. [Online]. Available:
https://www.mathworks.com/matlabcentral/fileexchange/52746-sphero-api-matlab-sdk. [Accessed 7 January 2017].
[10] M. Tomaszewski, "mark-toma/SpheroMATLAB: Control Sphero from MATLAB in m-code!," GitHub, Inc., 17 August 2016. [Online]. Available:
https://github.com/mark-toma/SpheroMATLAB. [Accessed 26 December 2016].
[11] developer.thalmic.com, "Myo SDK 0.9.0: Myo SDK Manual," Thalmic Labs, 2014. [Online]. Available:
https://developer.thalmic.com/docs/api_reference/platform/index.html. [Accessed 8 December 2016].
[12] sdk.sphero.com, "Sphero Docs | Getting Started," Sphero, 2016. [Online]. Available: http://sdk.sphero.com/sdk-documentation/getting-
started/. [Accessed 8 December 2016].](https://image.slidesharecdn.com/tomaszewskimarkthesisslidesfinal-170207032659/85/Tomaszewski-Mark-Thesis-Slides-Application-of-Consumer-Off-The-Shelf-COTS-Devices-to-Human-Motion-Analysis-62-320.jpg)

















































