Download as PDF, PPTX
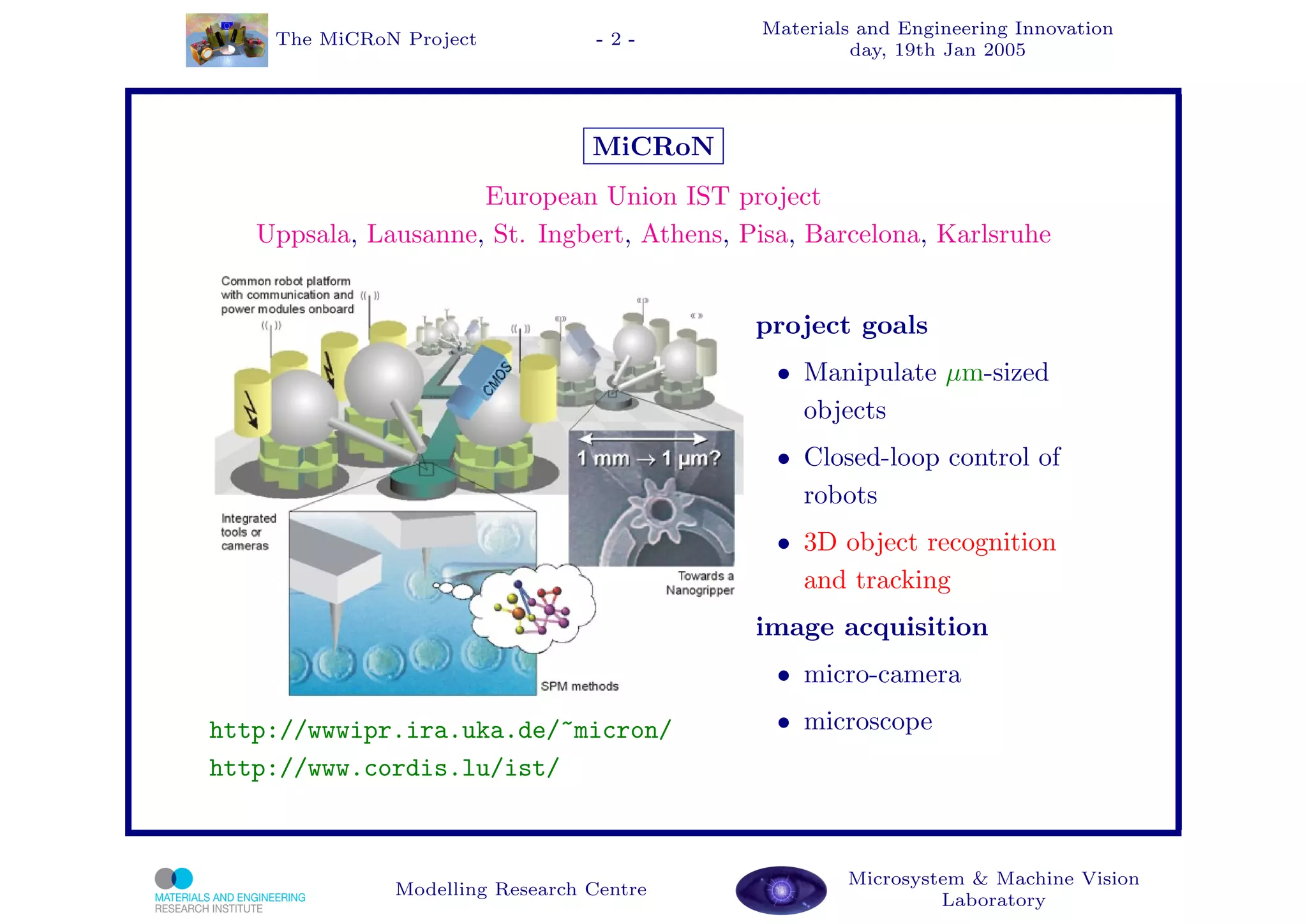
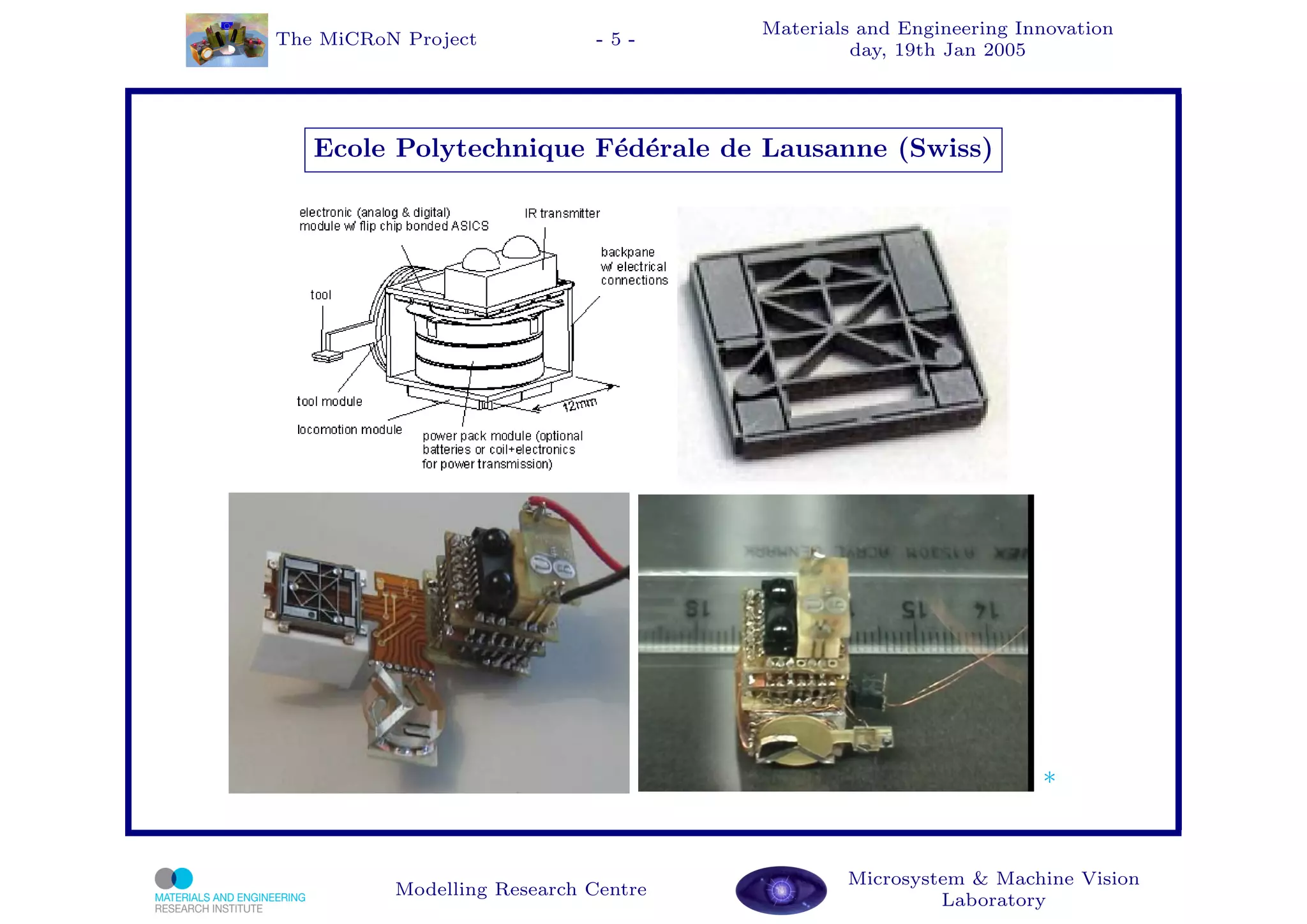
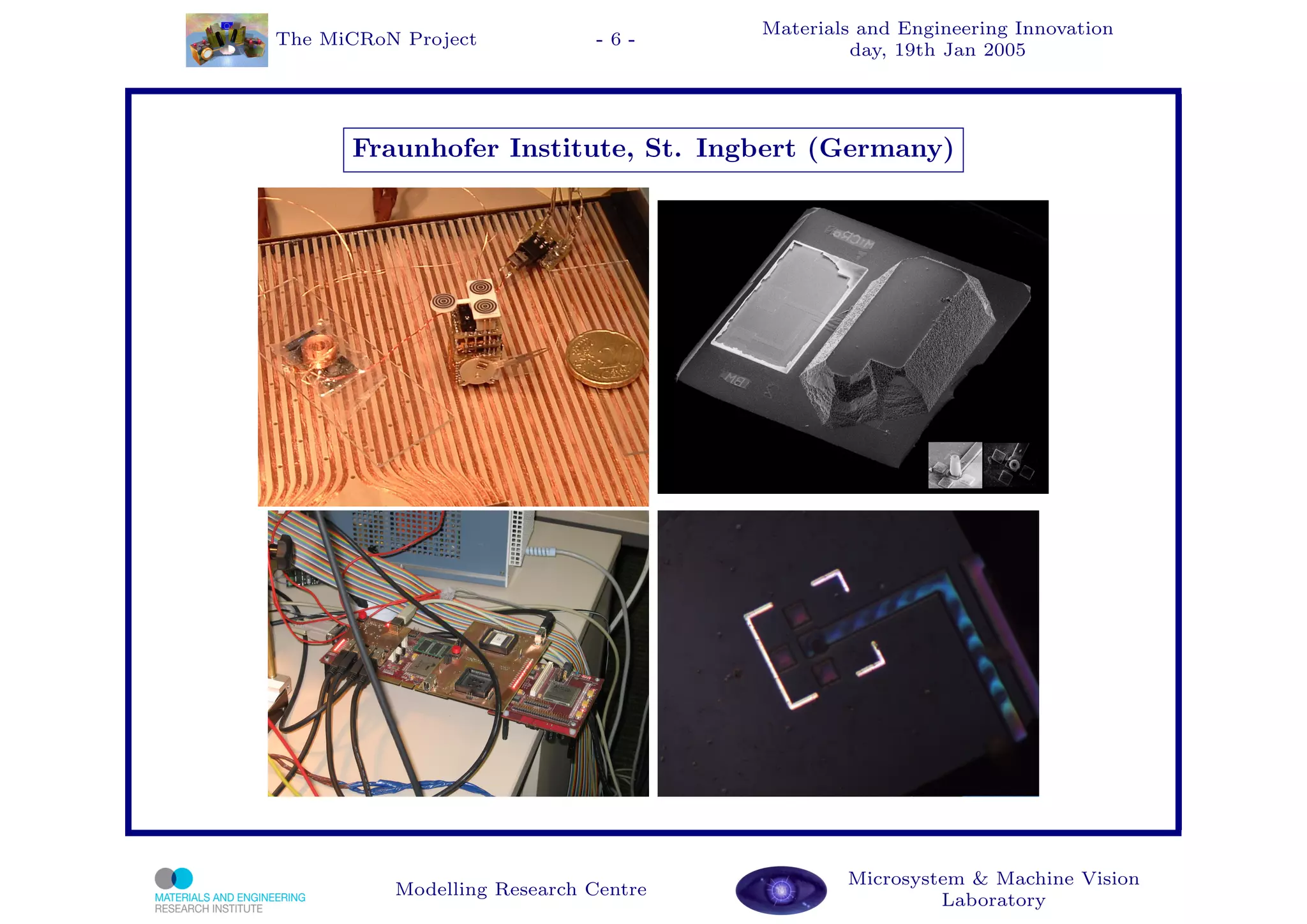
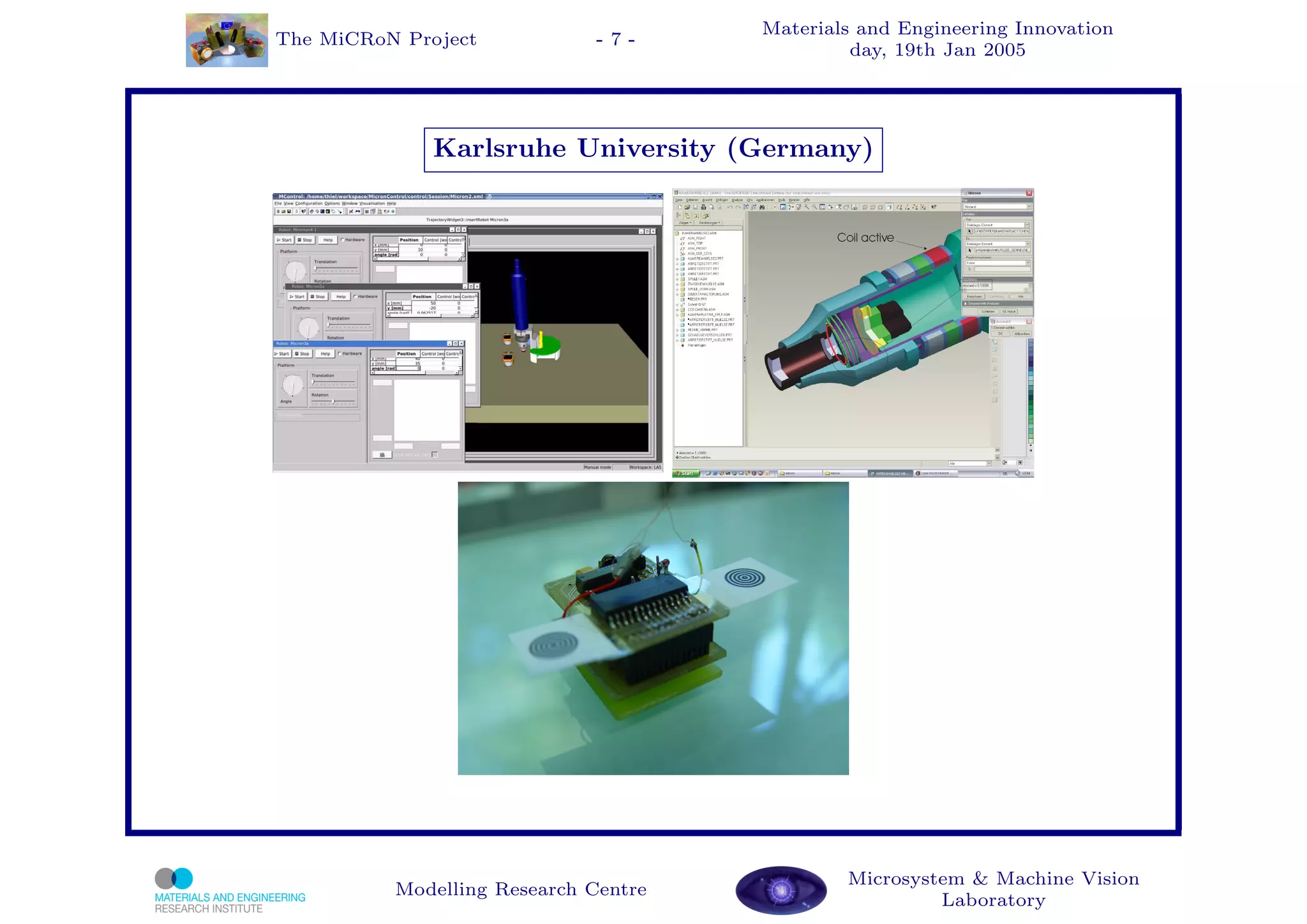
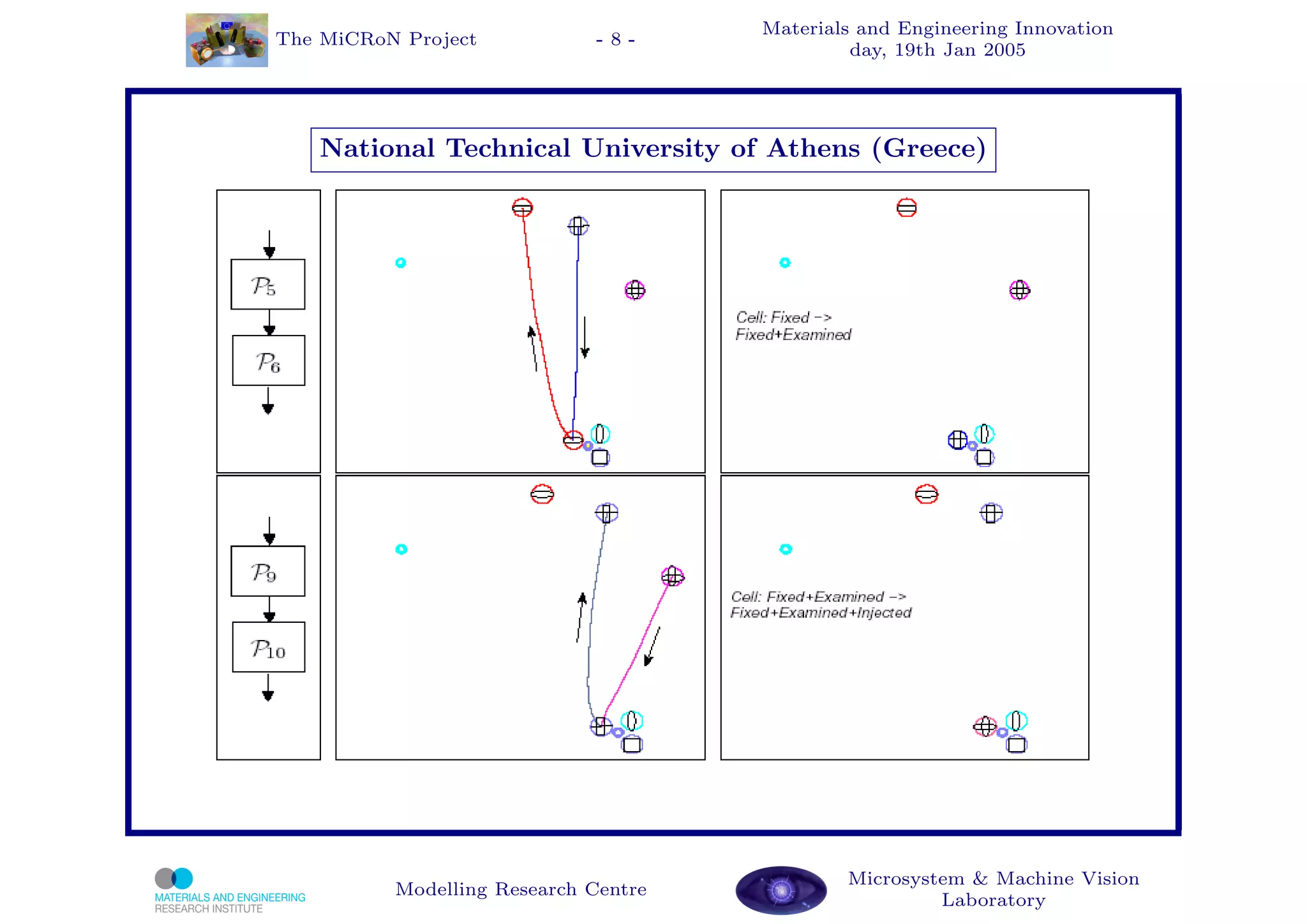
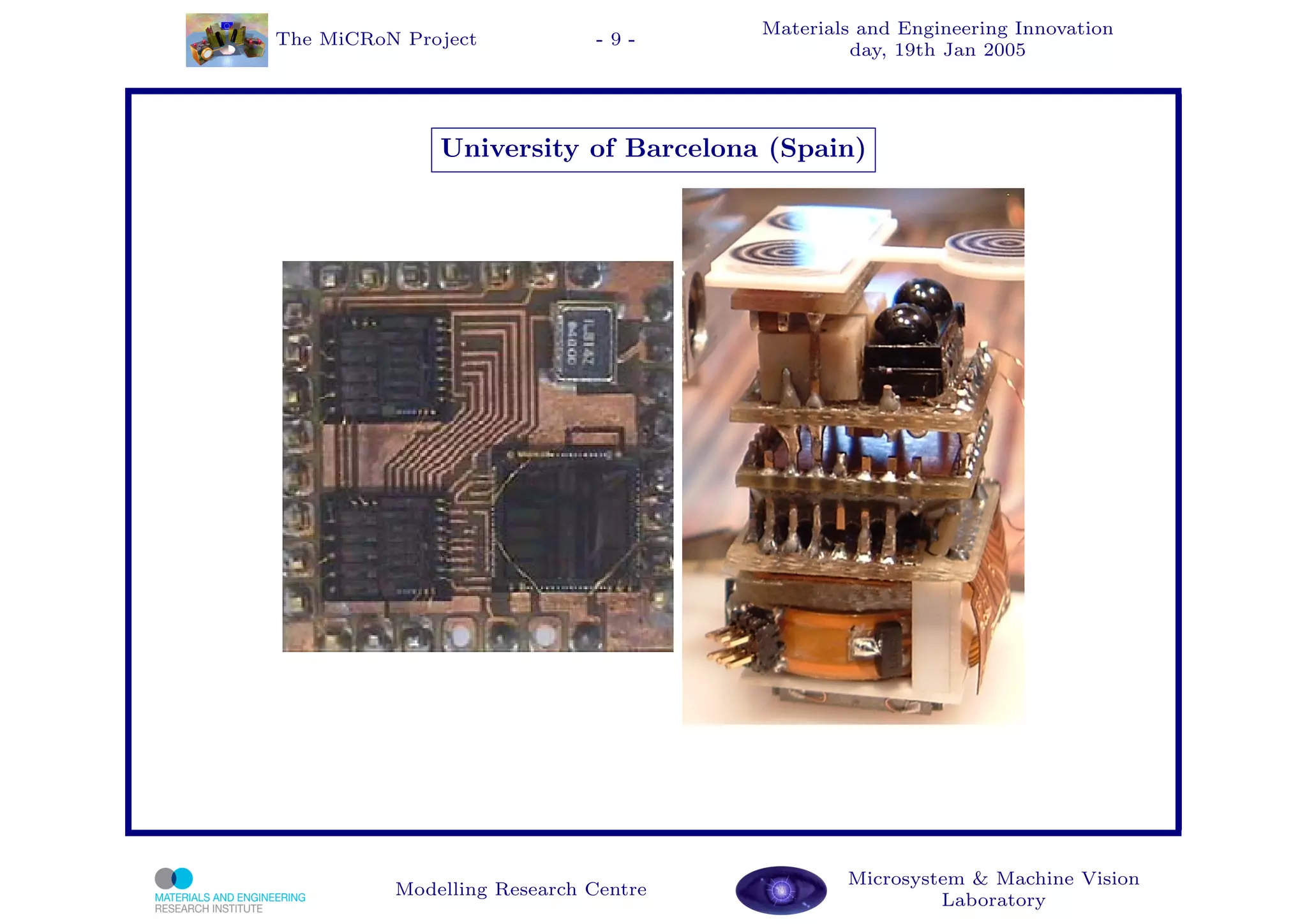

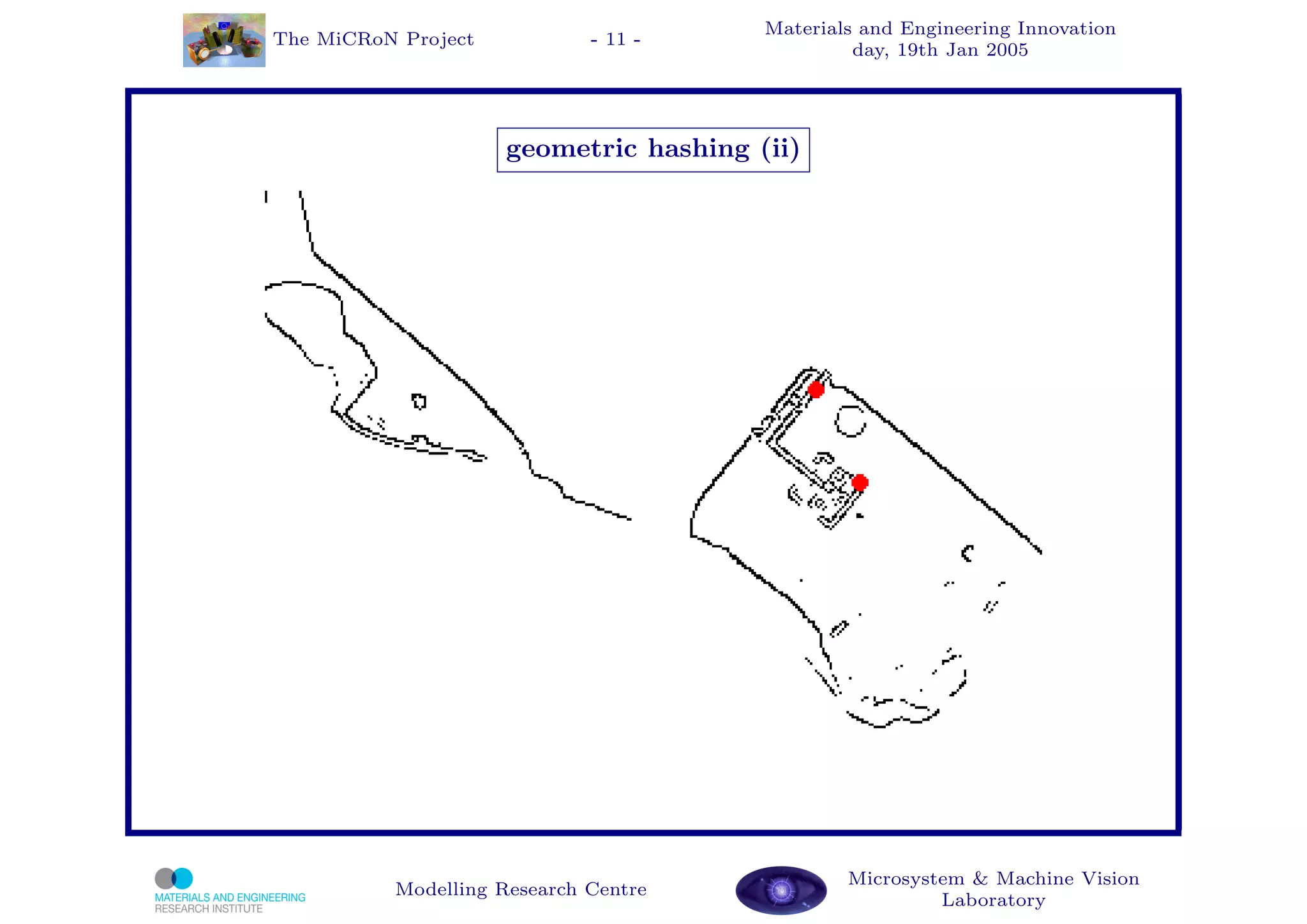
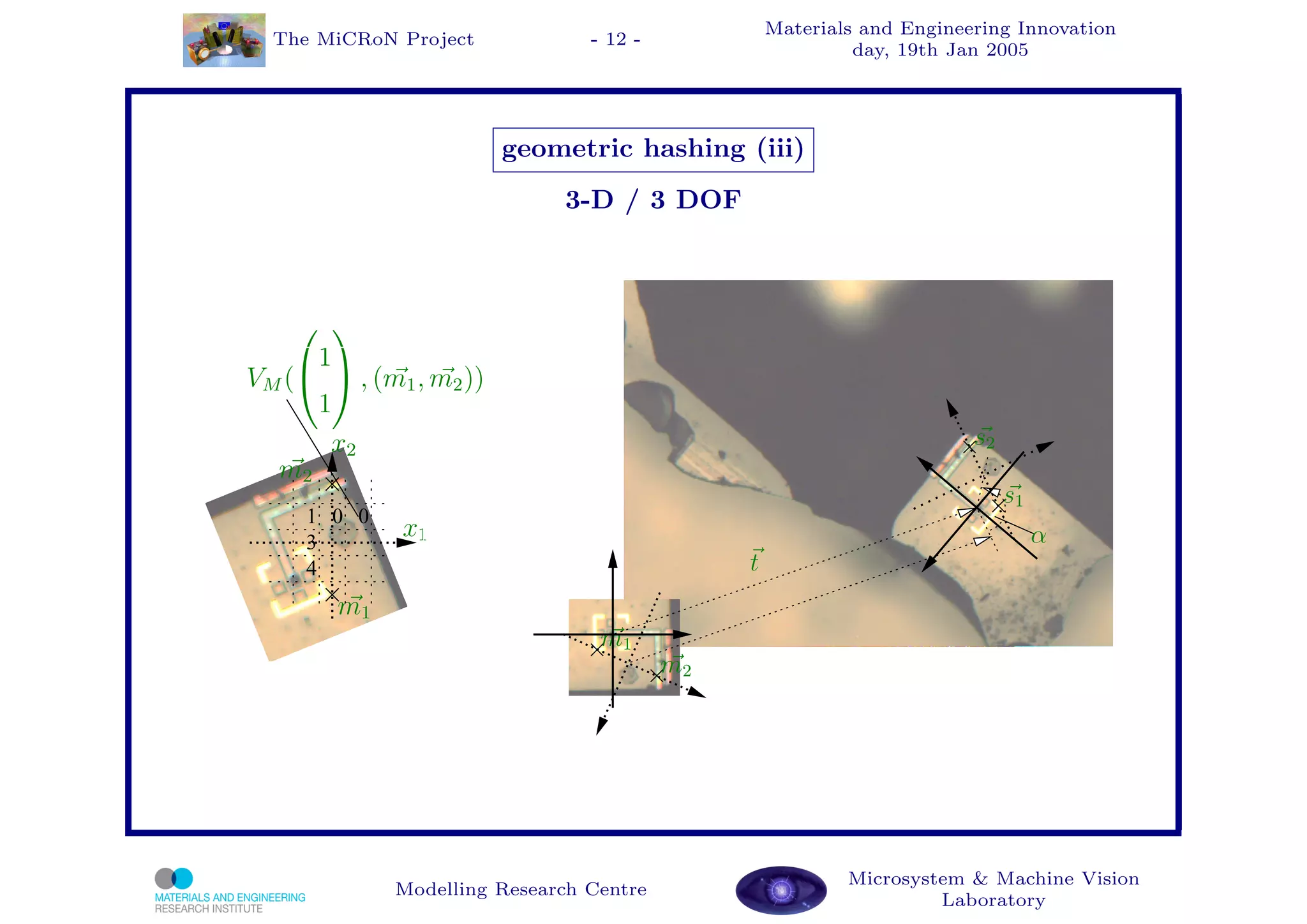
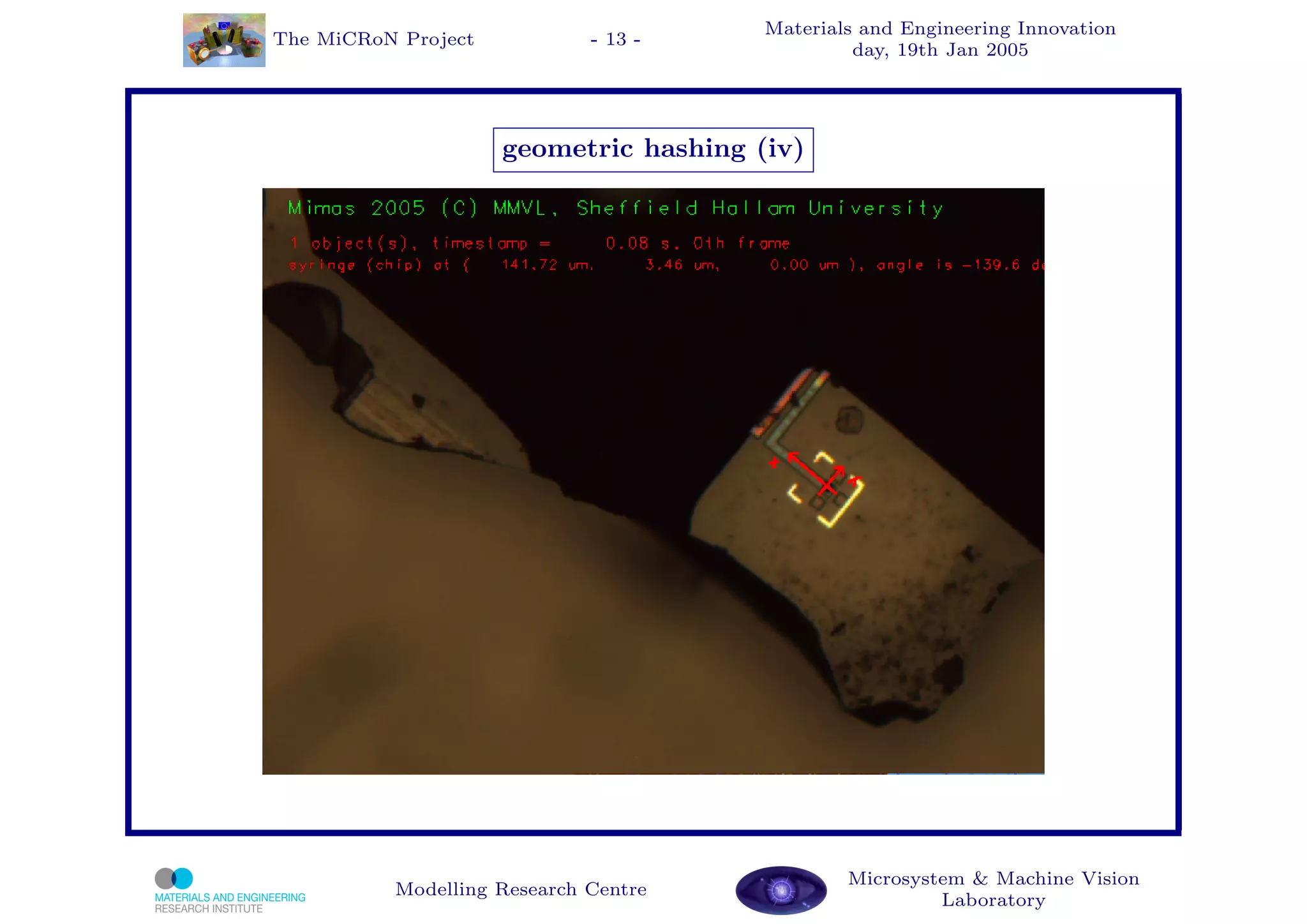
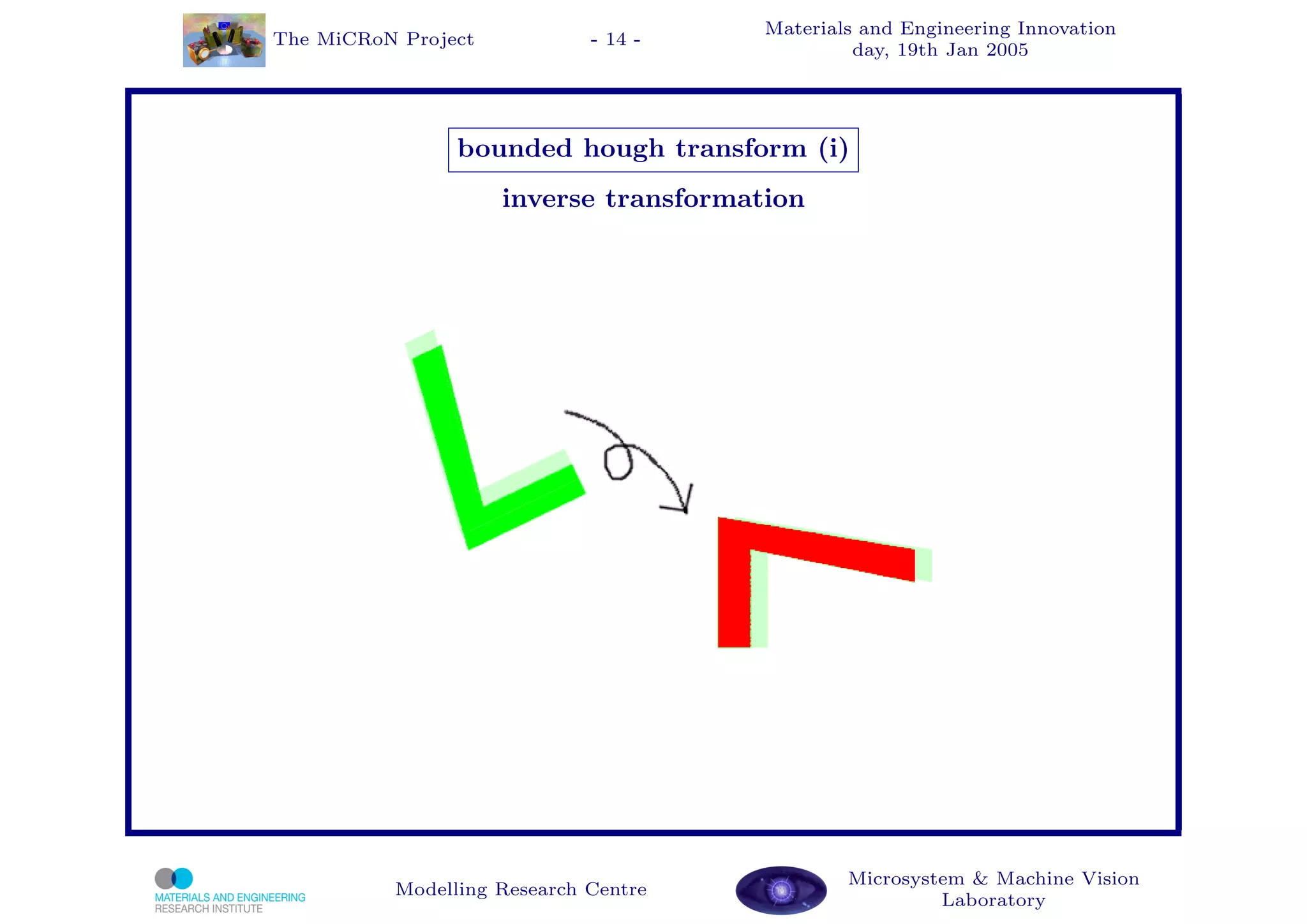
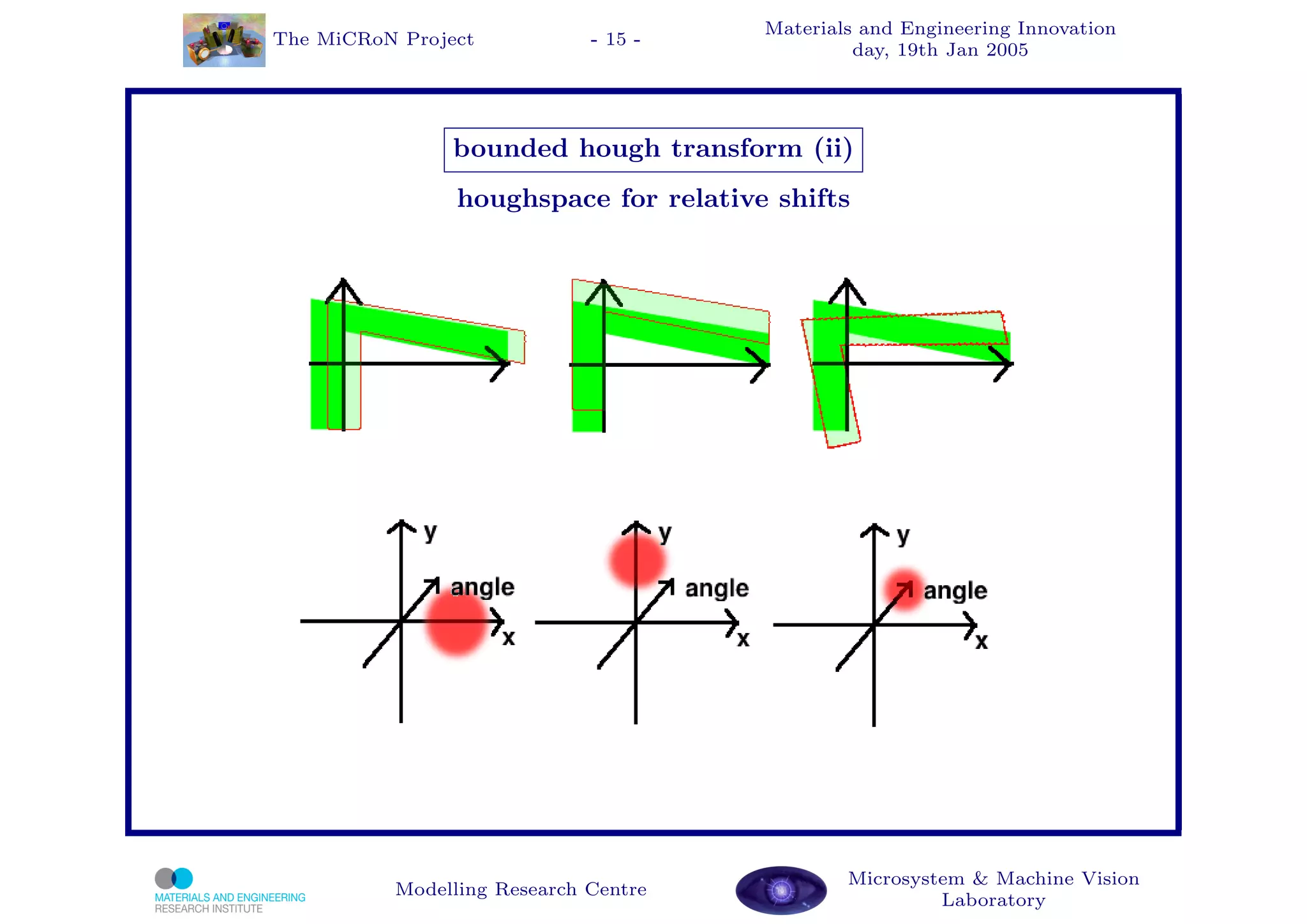
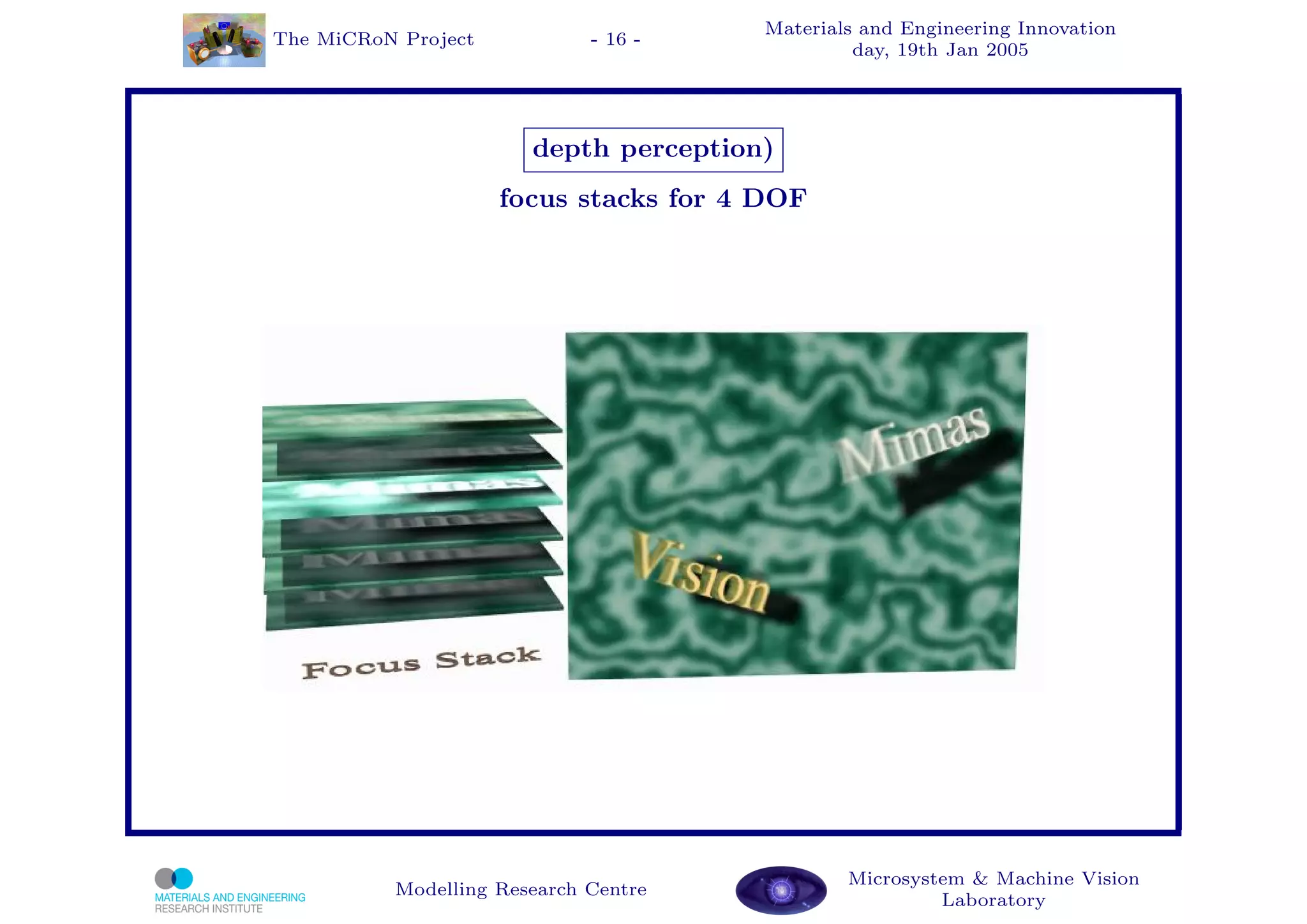
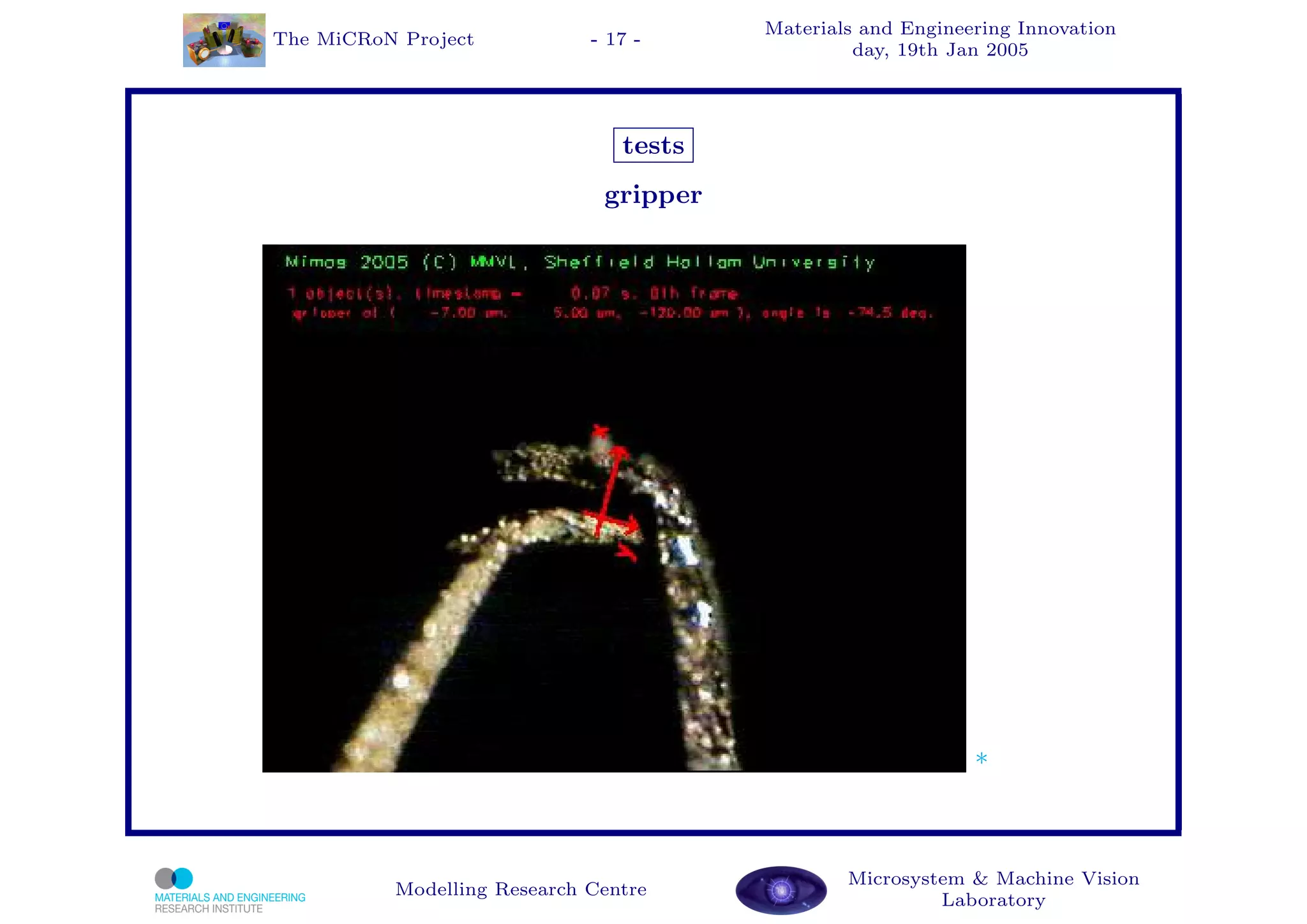
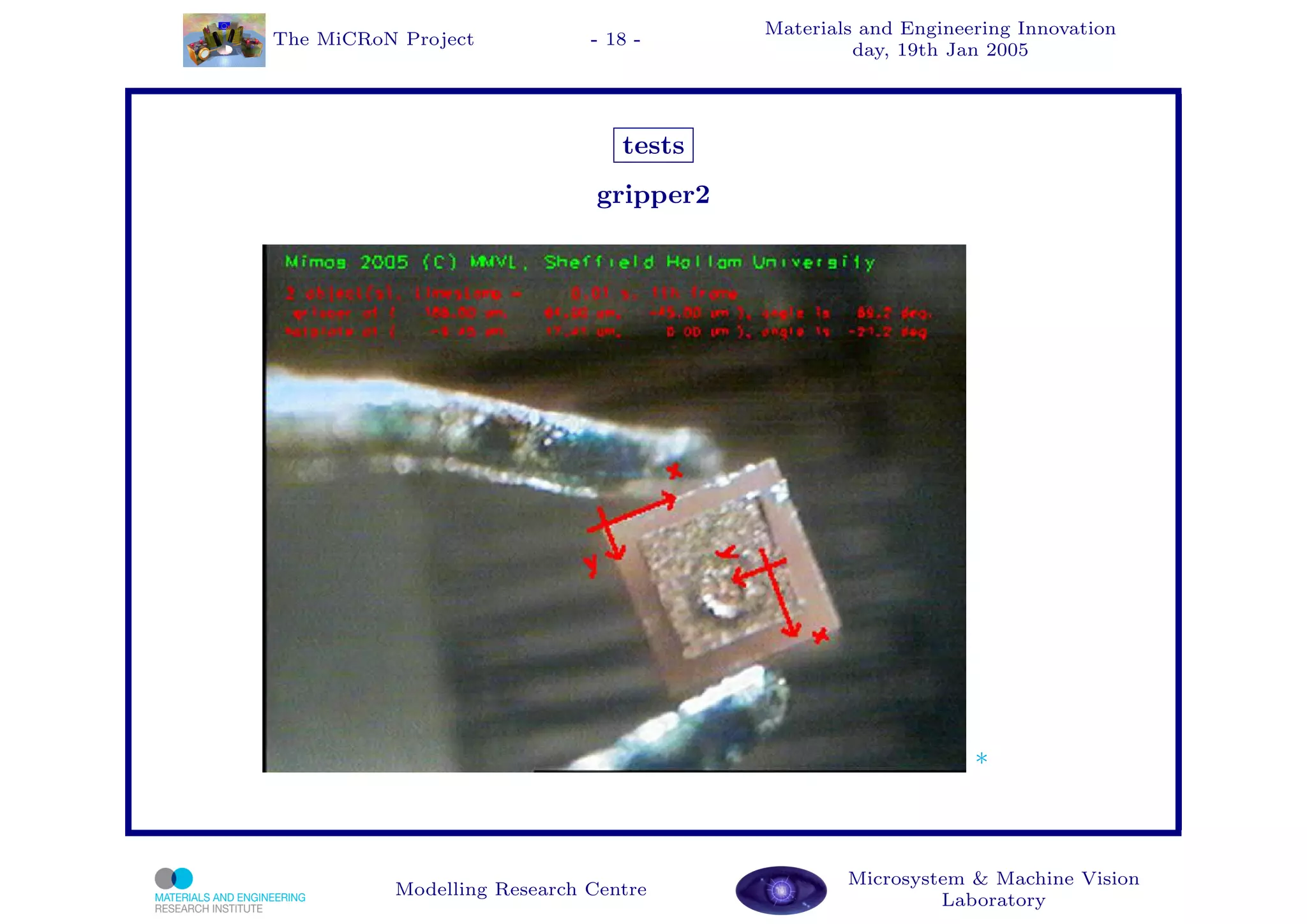


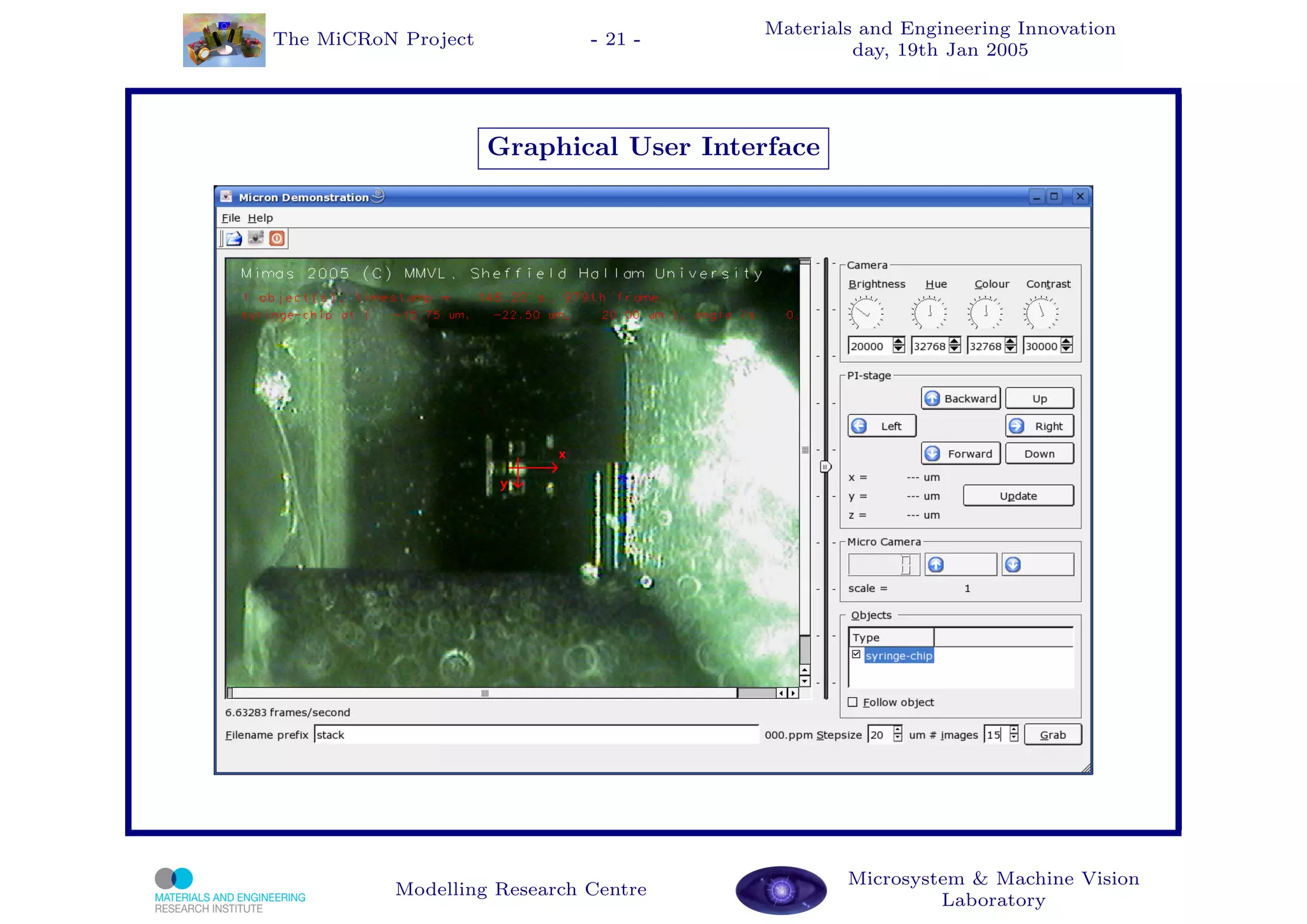


The document describes the MiCRoN Project, a European Union funded project aimed at manipulating micro-sized objects. The project involves several European universities and research institutions working towards goals of closed-loop control of micro-robots, 3D object recognition and tracking at the micro-level. Key areas discussed include micro-camera image acquisition, geometric hashing algorithms for object recognition and tracking in 3D, bounded Hough transforms, using focus stacks to enable depth perception, and tests of micro-grippers.





























































![[BDD 2025 - Full-Stack Development] Digital Accessibility: Why Developers nee...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-digitalaccessibilitywhydevelopersneedtoknowandcarein2025-251127011019-0674441d-thumbnail.jpg?width=640&height=640&fit=bounds)







![[BDD 2025 - Full-Stack Development] PHP in AI Age: The Laravel Way. (Rizqy Hi...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-phpinaiagethelaravelway-251125012602-ef9d330e-thumbnail.jpg?width=640&height=640&fit=bounds)









