GPS-Global Positioning System
•Department of Defense navigation system
• Triangulation from a constellation of 24
satellites broadcasting pseudo-randomly
coded signals on radio waves (speed of light)
from known positions (given by orbital
ephemerides) at very precise time intervals.
• Satellites at altitude of 20,200 km;
distributed in 6 orbital planes with inclination
of 55 degrees to equator
• Four or more satellites visible at all times
anywhere in world.
• First satellite launched February 22, 1978
3.
GPS-Global Positioning System
•Coordinates are determined using known
satellite positions and the measured
distances between those satellites and the
unknown position at a precise time.
• A GPS receiver determines its position in
three dimensions: x, y, and z. The height (z)
coordinate is different from the horizontal
coordinates (x and y) both in how it is defined
and how accurately it can be measured.
GPS Data -Signal Types
• Single frequency C/A-code (Civilian Access;
Coarse Acquisition) - 1.023 MHz chipping rate
• Single frequency P code (Precise;
Protected, or Precision); becomes Y-code
when encrypted - 10.23 MHz chipping rate;
only 2 satellites have P-code, the rest have Y-
code.
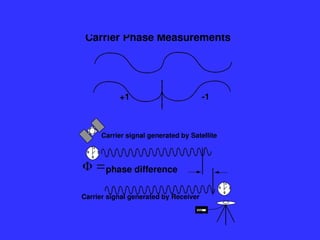
• Dual frequency Carrier Phase (L1 and L2) -
L1 frequency = 1575.42 MHz (λ = 19 cm), L2
frequency = 1227.6 MHz (λ = 24.4 cm).
• L1 carries C/A code, P code, and
Navigation message
• L2 carries P code only
6.
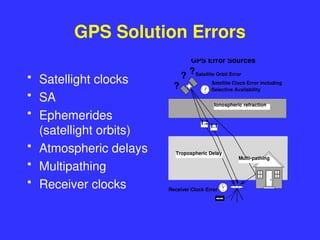
GPS Solutions
• Simple,Typical, or Pseudo-range -
accuracy of +/- 100m with SA turned on or +/-
20 to 25m with SA off (ex. uncorrected
solutions using GeoExplorer or Garman
receivers)
–SA (Selective Availability) - dithering or
introduction of a clock timing error and
introduction of an orbital error.
• Differential - correction uses a terrestrial
point with precisely known position between
the satellites and the unknown points to
reduce errors.
7.
GPS Solutions
• Real-timedifferential - correction using a
virtual base station (ex. Omnistar satellite
system or coast guard system)
• Post processed differential - correction
using base station of known coordinates
using single frequency C/A-code or dual
frequency carrier phase (ex. corrected
GeoExplorer, Trimble 4000ssi or Ashtech Z-
12)
8.
- Solve forposition of field station
relative to reference station.
- Eliminate common errors including
Selective Availability
- Reference station computes
pseudorange corrections for field
stations
Differential GPS Positioning
1000
1000 ?
GPS reference station
- known position
GPS field station
- unknown position
9.
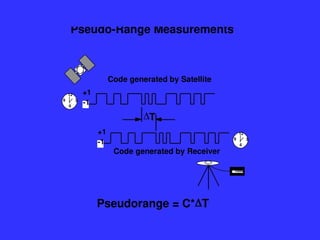
GPS Solution Details
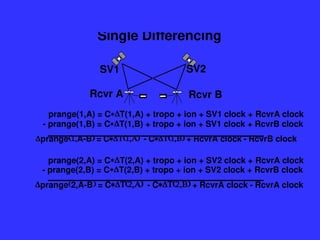
•Pseudo-range solution (single difference
solution)- difference between time of signal
transmission from satellite and time of arrival
at receiver times speed of light (c ~ 3 x 108
m/sec);
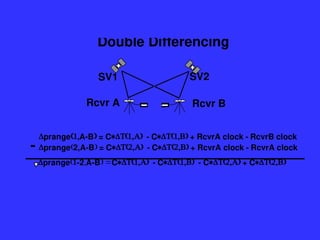
• Double-difference solutions - linear
combinations of difference solutions; further
reduces errors by canceling out differences
between receivers, satellites, and epochs.
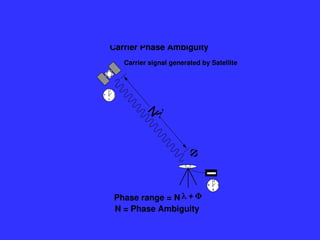
• Widelaning of the dual frequency -
differencing between the phase observations
made on L1 and L2.
Coordinate Systems
• ConventionalTerrestrial Reference System (CTRS) aka
Geocentric XYZ aka Earth Centered Earth Fixed (ECEF) -
origin at mass center of earth; z-axis aligned with mean
spin axis of earth; x-axis points toward the Greenwich
Meridian; y-axis is at right angles to x in direction
determined by right-hand rule.
• Universal Transverse Mercator (UTM) - meters; 60 N-S
elongate zones each 6 degrees in longitude; zone 1 starts
at 180 degrees longitude and they proceed east; x is called
easting and y is called northing; the origin of x and y in
UTM is the intersection of the equator and central
meridian, where x=500,000m (numbers decrease to east
and increase to west) and y=10,000,000m (numbers
increase to north and decrease to south); easting normally
precedes northing.
• Geographic Coordinates (latitude and longitude) =
ellipsoidal coordinates
19.
GPS-Vertical Measurements
• Ellipsoid- surface of an ellipsoid of
revolution
• Ellipsoidal Heights - Based on WGS-84
(World Geodetic System last updated in 1984)
• Orthometric Heights - height above the
geoid; equipotential surface that closely
approximates the idealized surface of the
oceans (aka) height above mean sea level
(AMSL)
• Geoidal Undulations - geoidal height which
is the geoid-ellipsoid separation. Geoid
models are based on satellight and terrestrial
gravity data.
20.
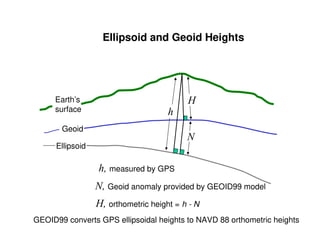
Ellipsoid and GeoidHeights
h
H
N
Earth’s
surface
Geoid
Ellipsoid
h, measured by GPS
N, Geoid anomaly provided by GEOID99 model
H, orthometric height = h - N
GEOID99 converts GPS ellipsoidal heights to NAVD 88 orthometric heights
21.
GPS-Vertical Datums
• GPSheight - ellipsoid height given in CTRS
• WGS-84 (World Geodetic System last updated in
1984) - defines the reference ellipsoid and the CTS
used for GPS work.
• NGVD67 - (National Geodetic Vertical Datum)
attempted to combine geoid and AMSL corrections;
was an attempt to position the reference ellipsoid
so that it best approximated the geoid. This datum
is no longer used.
• NAVD88 - (North American Vertical Datum) an
orthometric height datum. Based on a reference
ellipsoid, the surface of which approximates the
geoid over the region covered by the datum.


























![GPS[Global Positioning System]](https://cdn.slidesharecdn.com/ss_thumbnails/globalpositioningsystem-130707095218-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






















