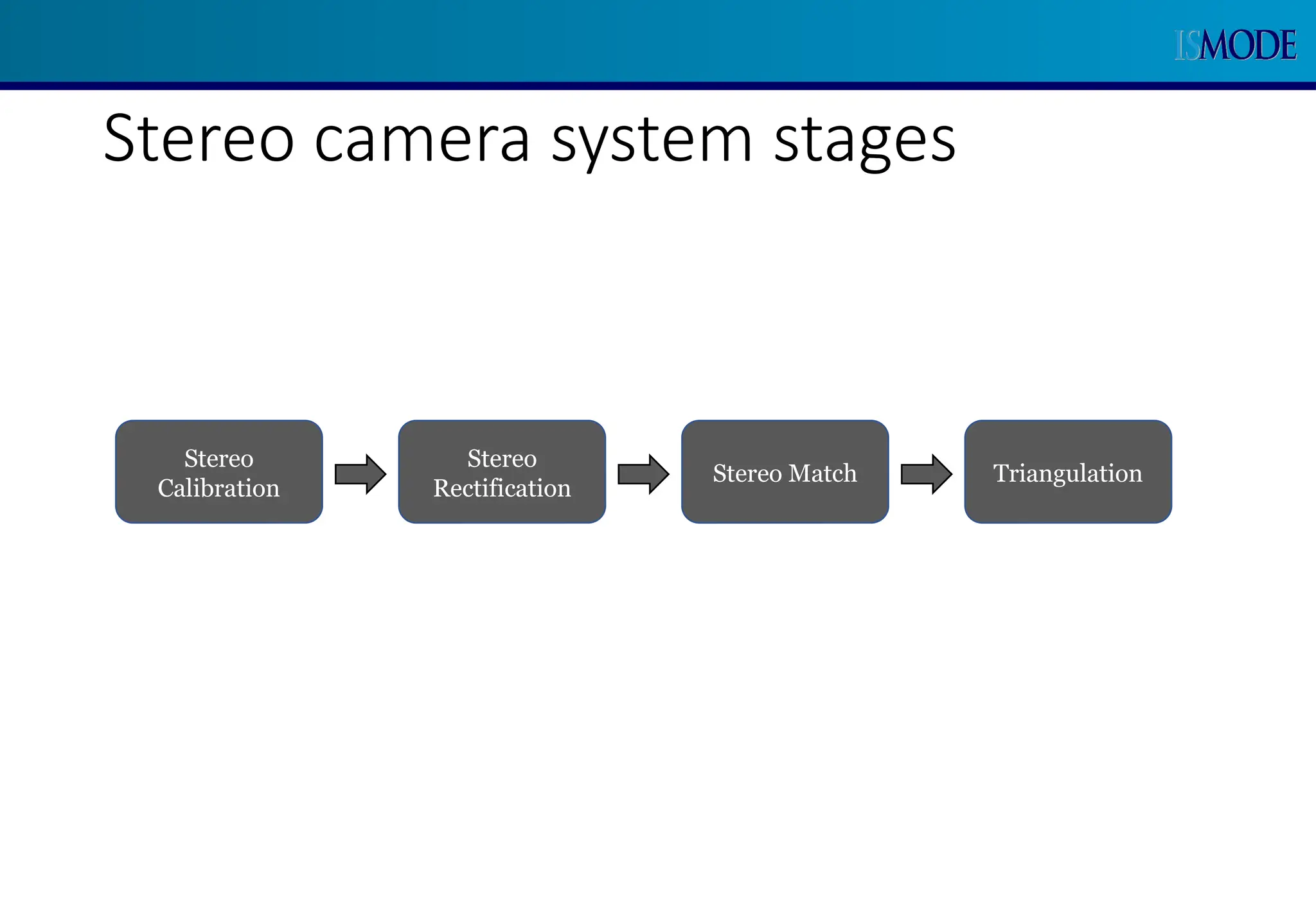
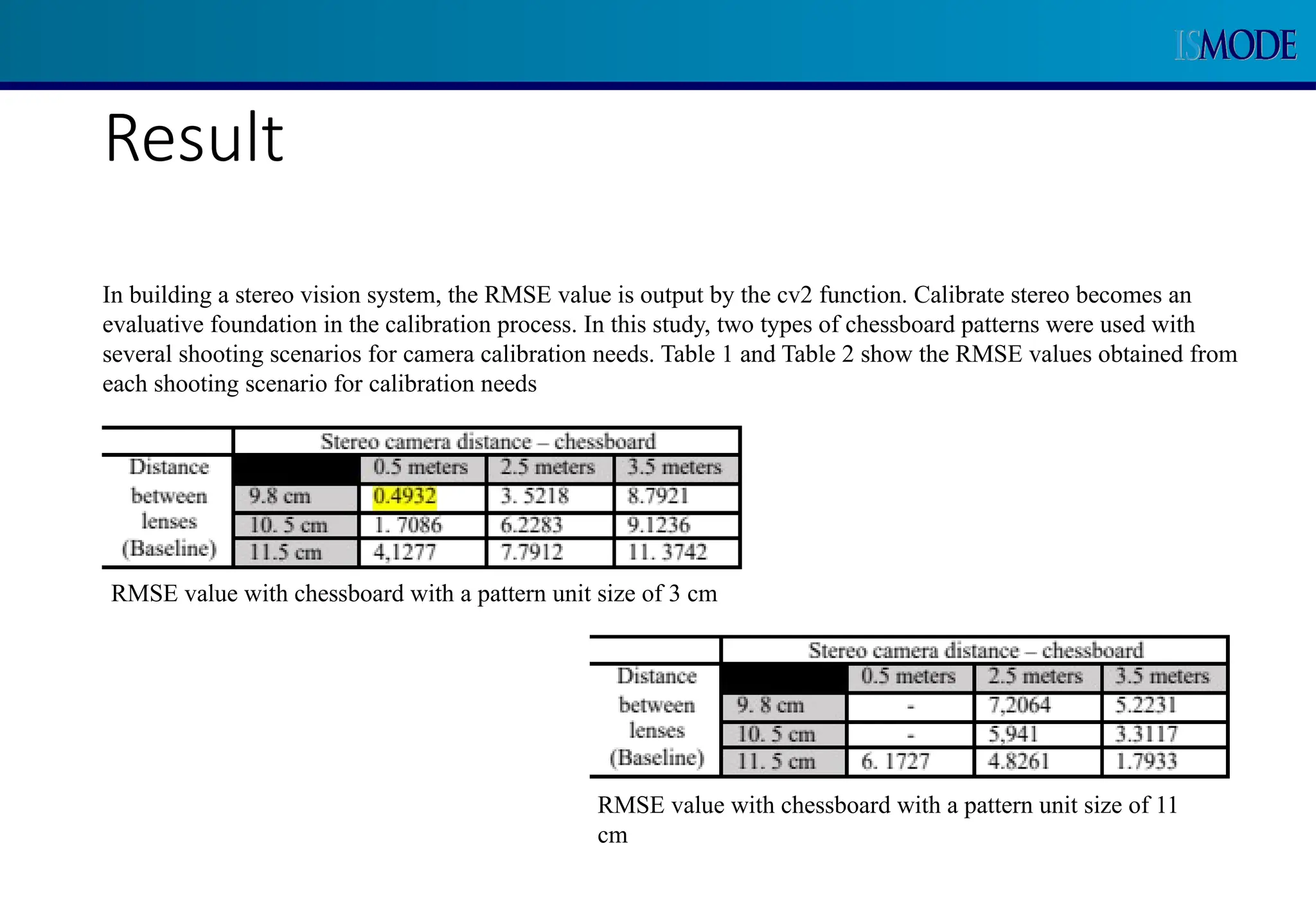
The document presents a study on stereo camera calibration for autonomous vehicles, highlighting the importance of the intelligent transportation system in Indonesia. It details the calibration process using two Logitech webcams, including steps to find chessboard corner coordinates and calculate intrinsic and extrinsic values. Results are evaluated using RMSE values from various chessboard patterns and shooting scenarios.