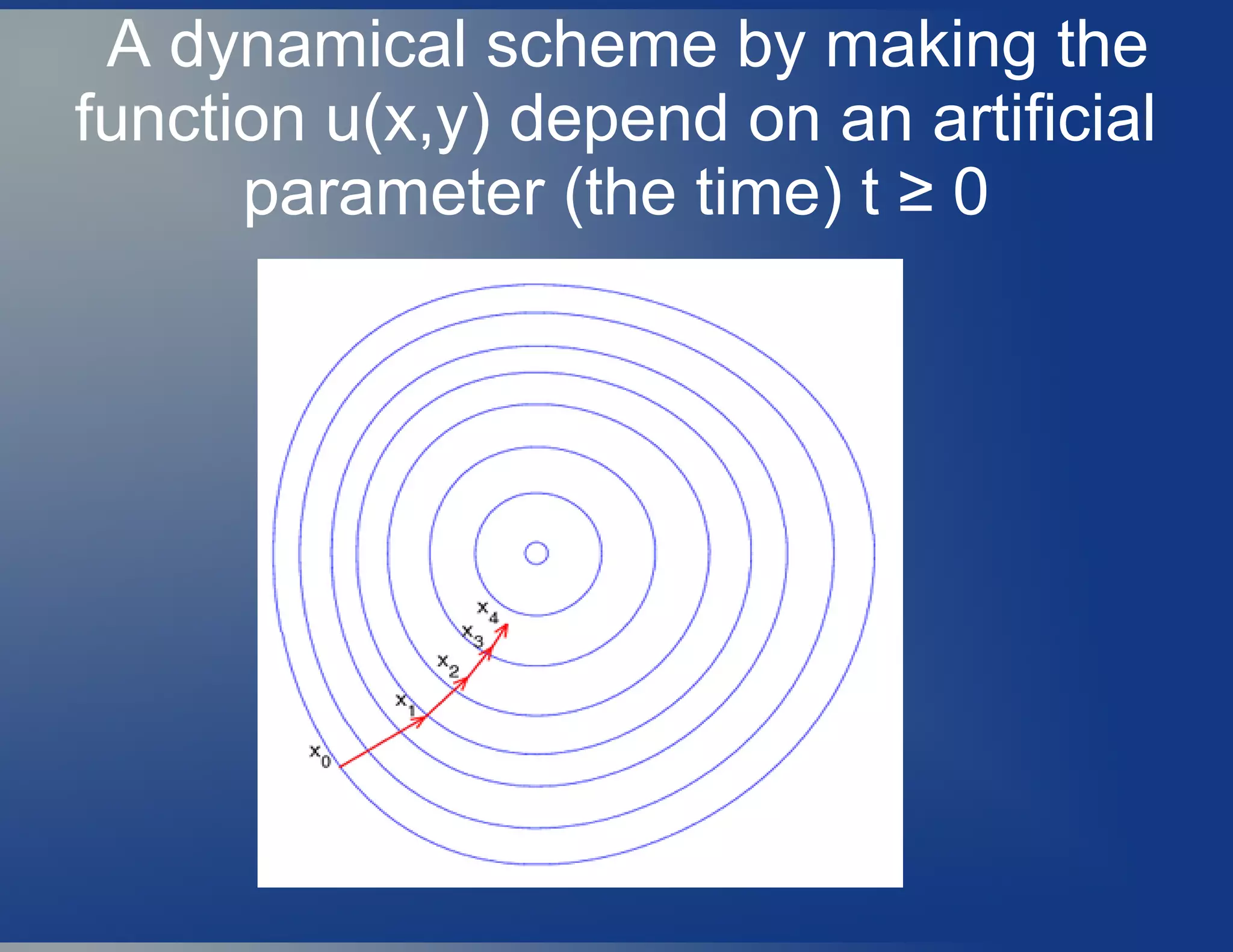
The document discusses a seminar on variational PDE-based image processing, covering topics such as image definition, defects, and recovery techniques. It explores mathematical representations, digital image processing, common issues like noise, and advanced models using PDEs for tasks like denoising and edge detection. It also highlights restoration methods, including anisotropic diffusion, and presents performance metrics for evaluating image processing techniques.

![In computer Vision ,analyzing images at different resolutions(scale)
is necessary to extract Various Descriptions of an Image.
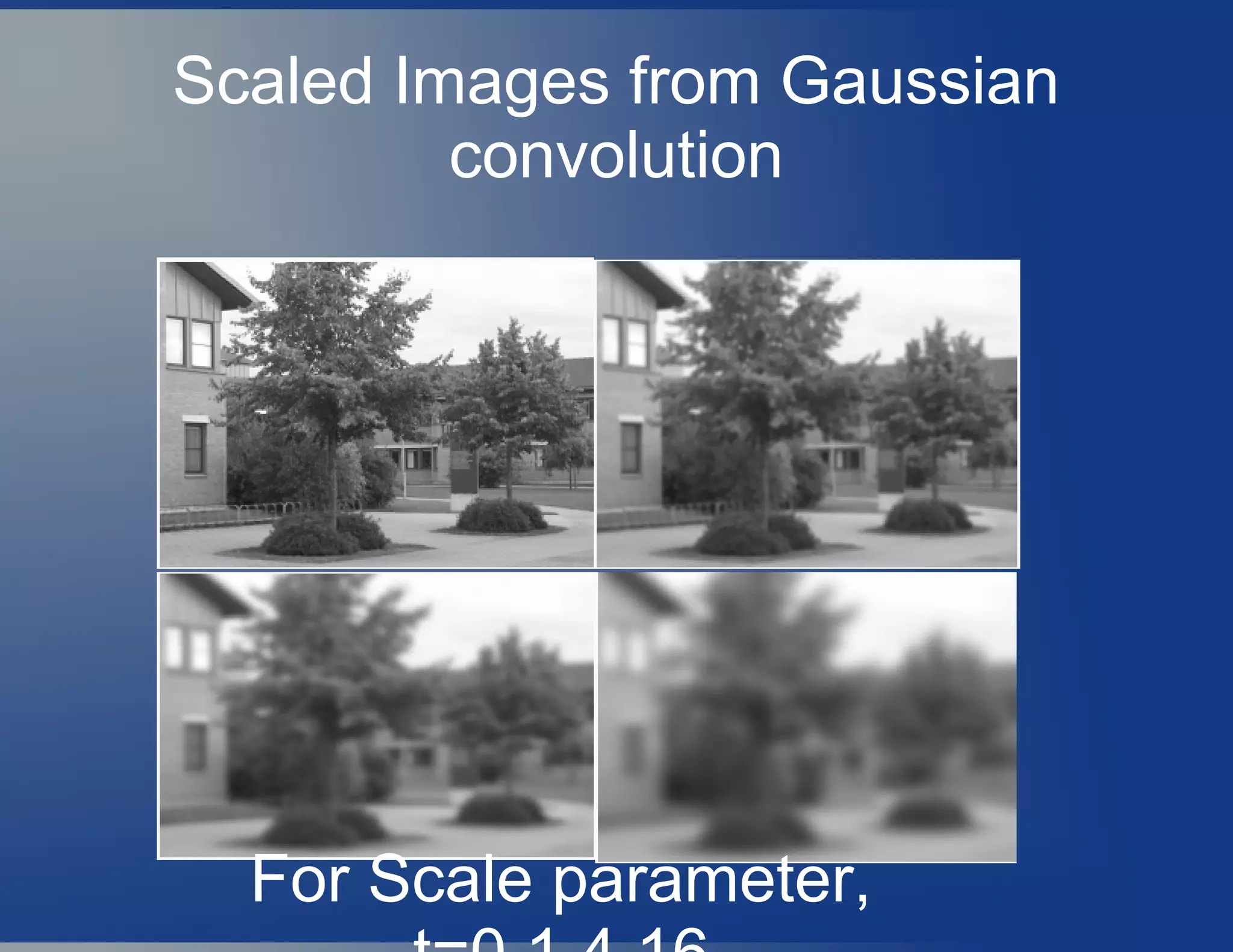
As a primitive scale-parametrization, the Gaussian convolution is
attractive for its "well-behavedness":
● The Gaussian is symmetric and strictly decreasing about the
mean, and therefore the weighting assigned to signal values
decreases smoothly with distance.
● The Gaussian convolution behaves well near the limits of the
scale parameter, t,
approaching the un-smoothed Image for small t, and
approaching the Mean value of Image for large t.
● The Gaussian is also readily differentiated and integrated.
Gaussian Smoothing[witkin]](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-18-2048.jpg)
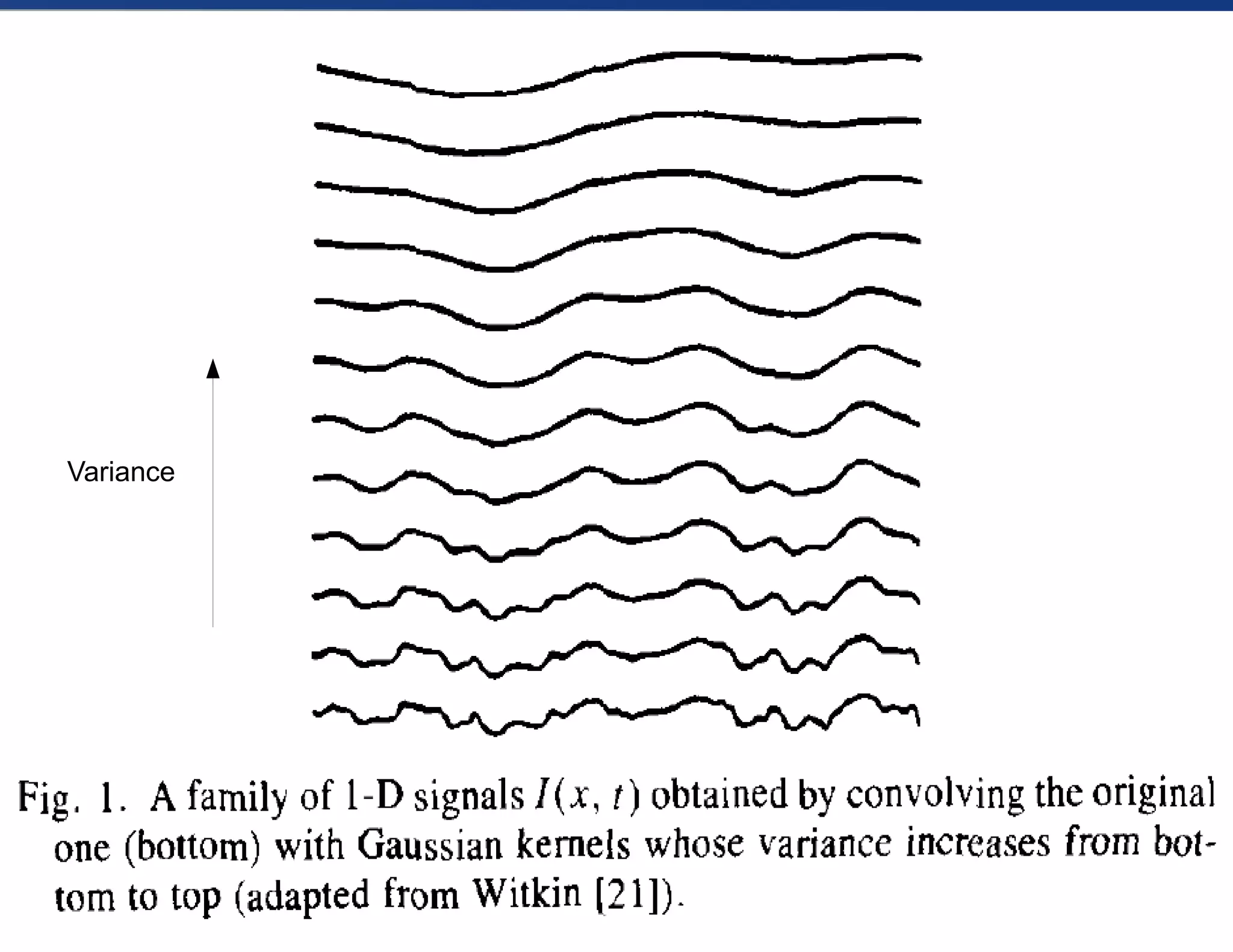
![The first step in this direction is Scale
Space Filtering for Smoothing
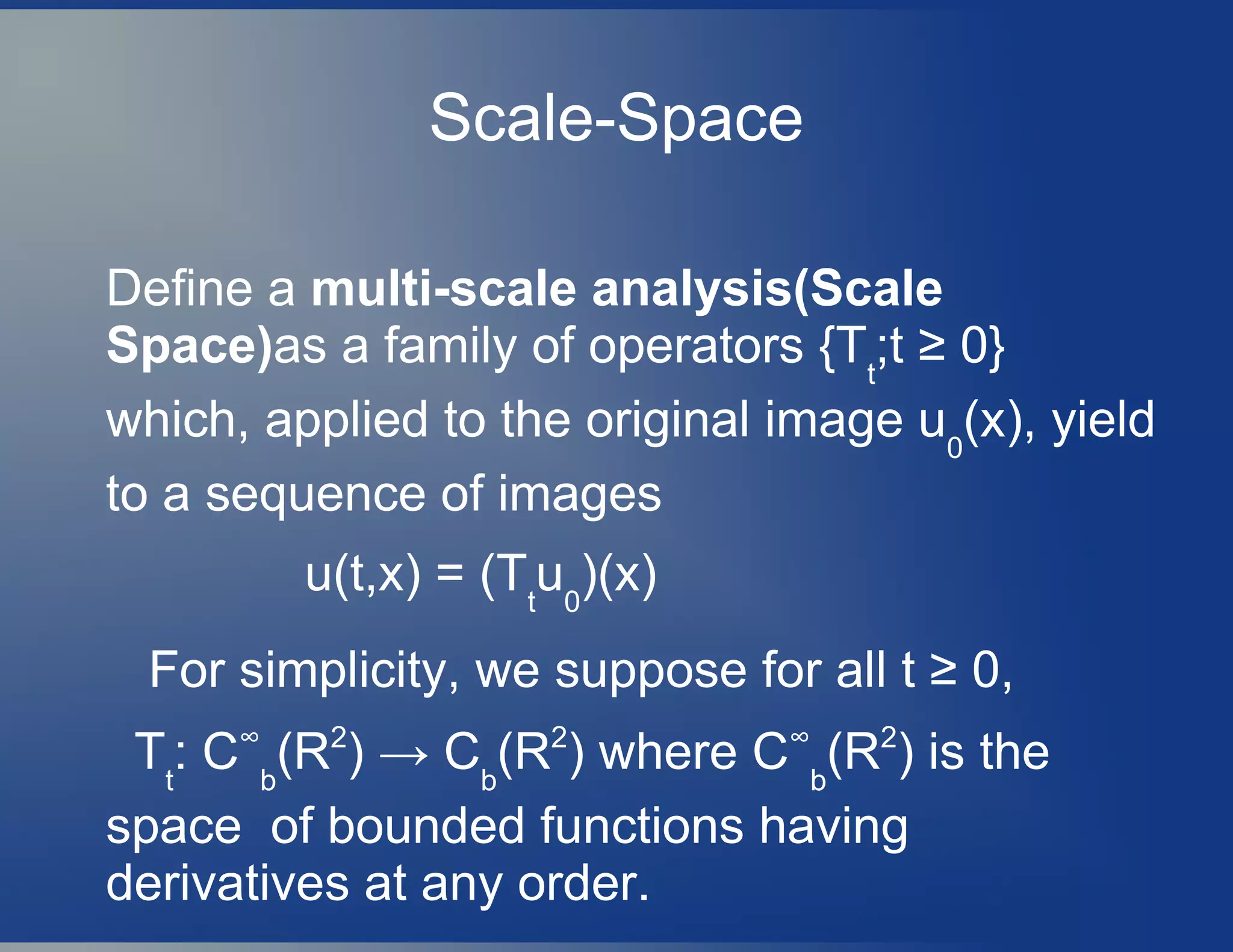
● [Witkin,1983]:(Scale Space)
The essential idea of this approach is to,
Embed the original image in a family of derived
images { I(x, y, t);t≥0} obtained by convolving
the original image I0
(x,y) with a Gaussian kernel
G(x,y; t) of variance t.
I(x,y,t) = I0
(x, y)*G(x,y;t)
● Larger values of t (the scale-space parameter),
correspond to images at coarser resolutions.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-19-2048.jpg)
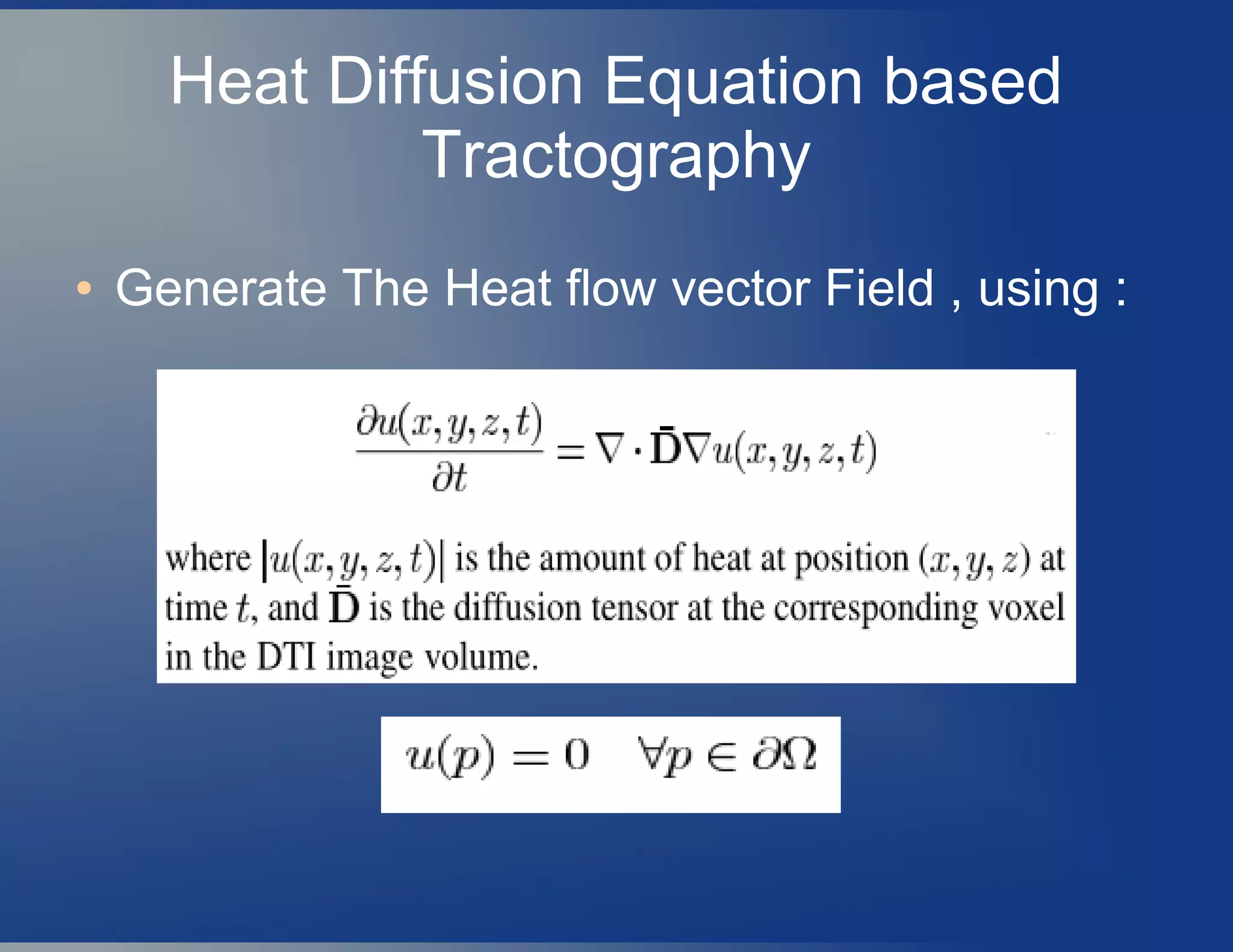
![Relating to the Heat Diffusion
Equation (Linear Diffusion)
[Koenderink and Hummel ]:
These one parameter family of derived (scale-
space) images may equivalently be viewed as the
solution of the heat diffusion equation.
It
=ΔI =Ixx
+Iyy
(Isotropic Diffusion)
with the initial condition,
I(x,y,0)=I0
(x, y), the original image and
with no intensity loss at boundaries.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-23-2048.jpg)
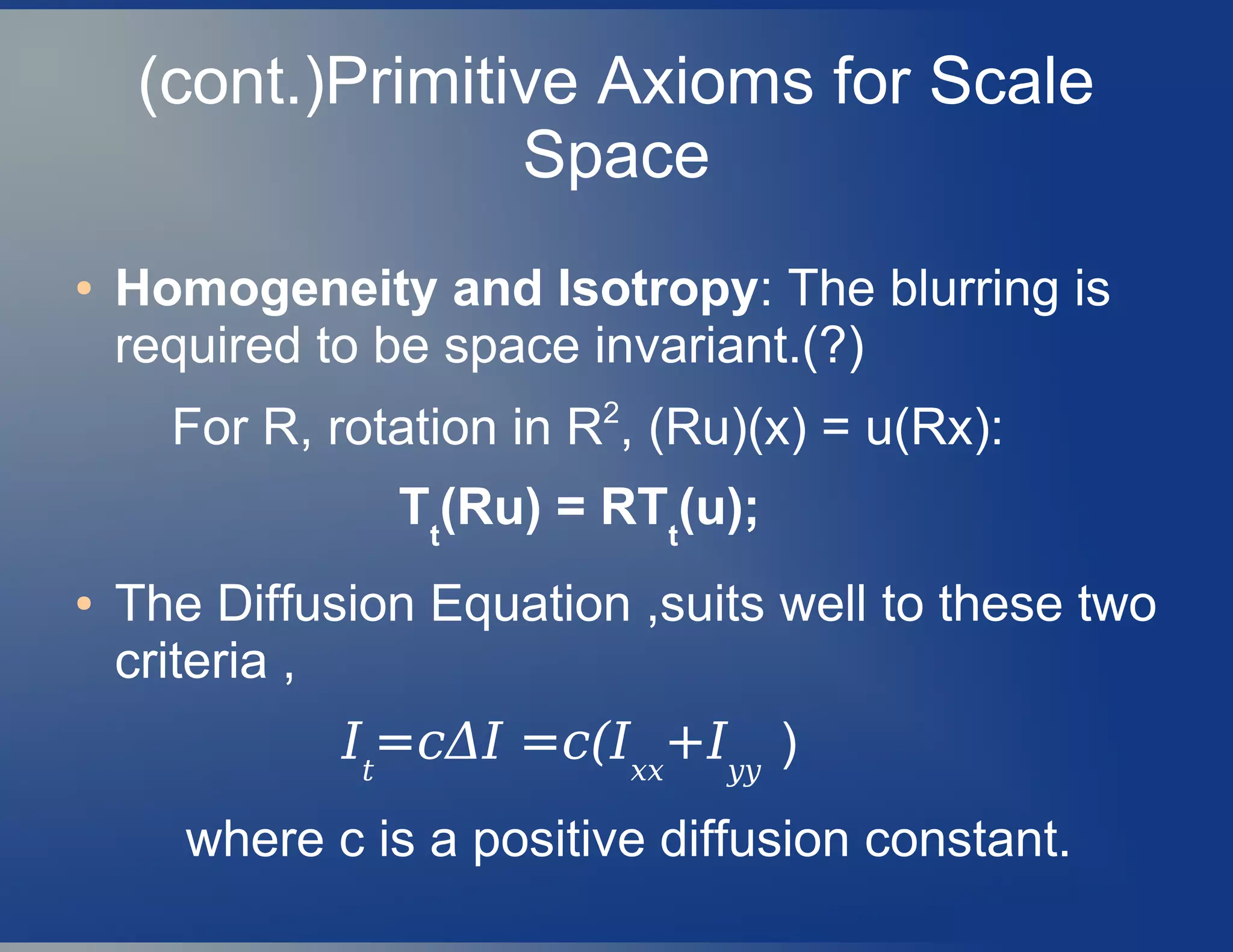
![Primitive Axioms for Scale
Space(Linear Filters)
[Koenderink] motivates the diffusion equation
formulation by stating two criteria.
● 1) Causality: Any feature at a coarse level of
resolution is required to possess a (not
necessarily unique) “cause” at a finer level of
resolution although the reverse need not be
true.
i.e. no spurious detail should be generated
when the resolution is diminished.
T0
= Id and s < t, T∀ ∃ (s,t)
: Tt
= T(s,t)
◦ Ts
;](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-24-2048.jpg)
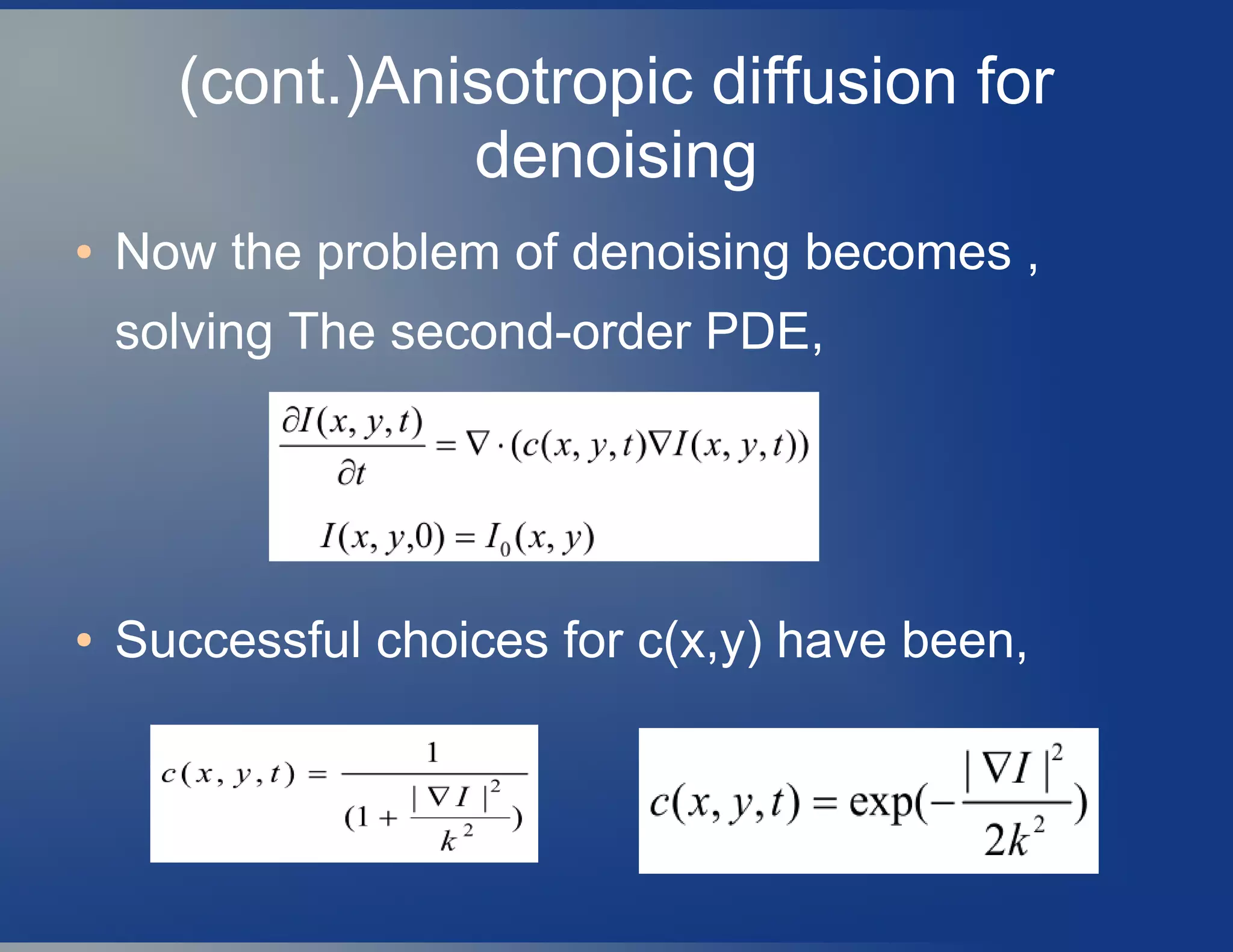
![Anisotropic diffusion for denoising
● [Perona & Malik,1987]: Observed that
isotropic diffusion is causing a serious
damage to the visibility of Edges as diffusion
progresses.
● Found that , directionally dependent
smoothing is the right choice for preserving
edges with better Image denoising
(enhancement / smoothing).
● Chose, the diffusion factor c(x,y) ,in such a
way that the diffusion will be relatively faster at
locations of low Gradient than at the locations
of High Gradients(Edges).](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-26-2048.jpg)
![Flaws in second order
● [Whittaker]:
Since the Laplacian of an image at a pixel is zero if
the image is planar in its neighborhood, these PDEs
attempt to remove noise and preserve edges by
approximating an observed image with a piecewise
planar image.
● Piecewise planar images look more natural than step
images(blocky) which anisotropic diffusion uses to
approximate an observed image.
● This effect is visually unpleasant and is likely to cause
a computer vision system to falsely recognize as
edges the boundaries of different blocks that actually
belong to the same smooth area in the original image.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-29-2048.jpg)
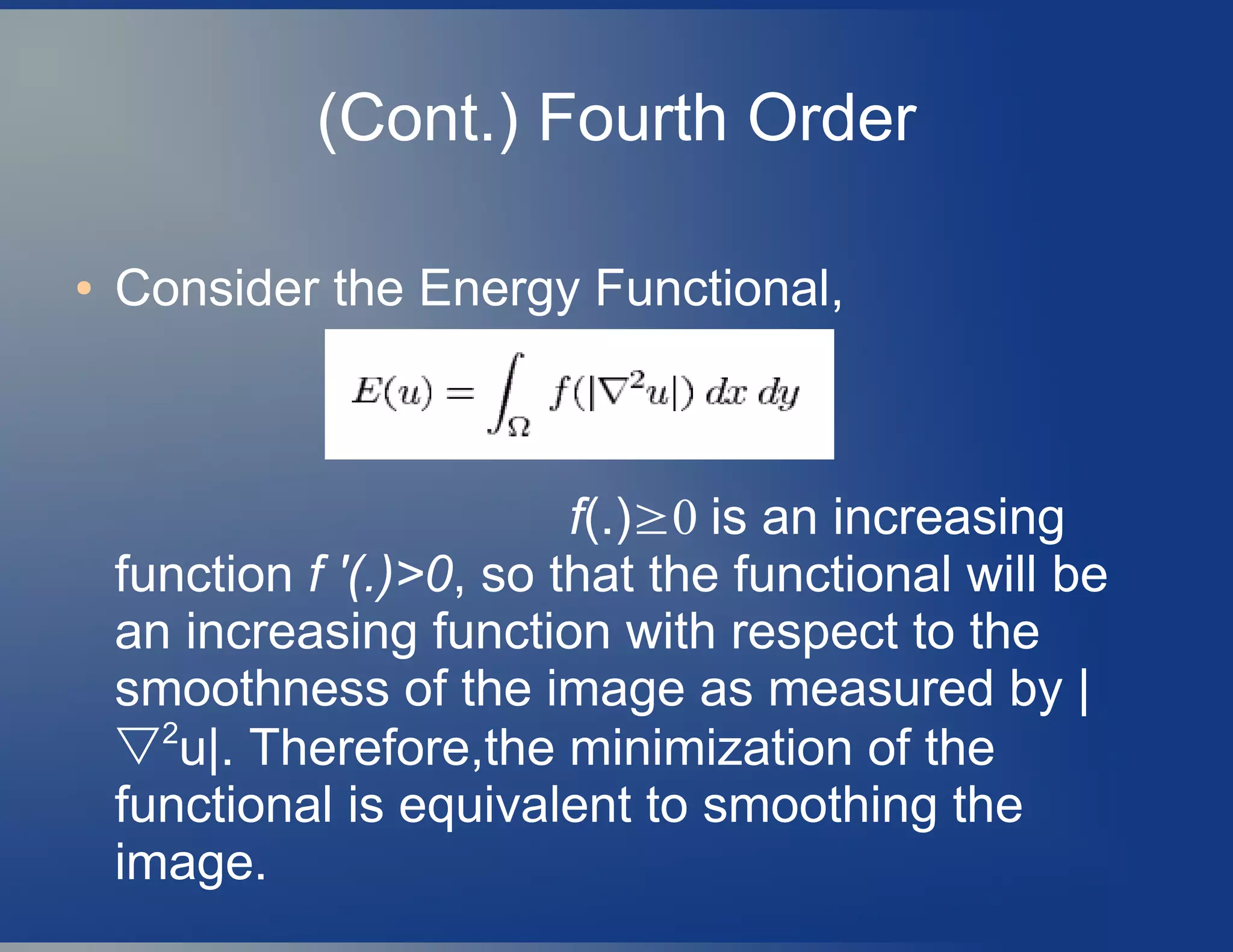
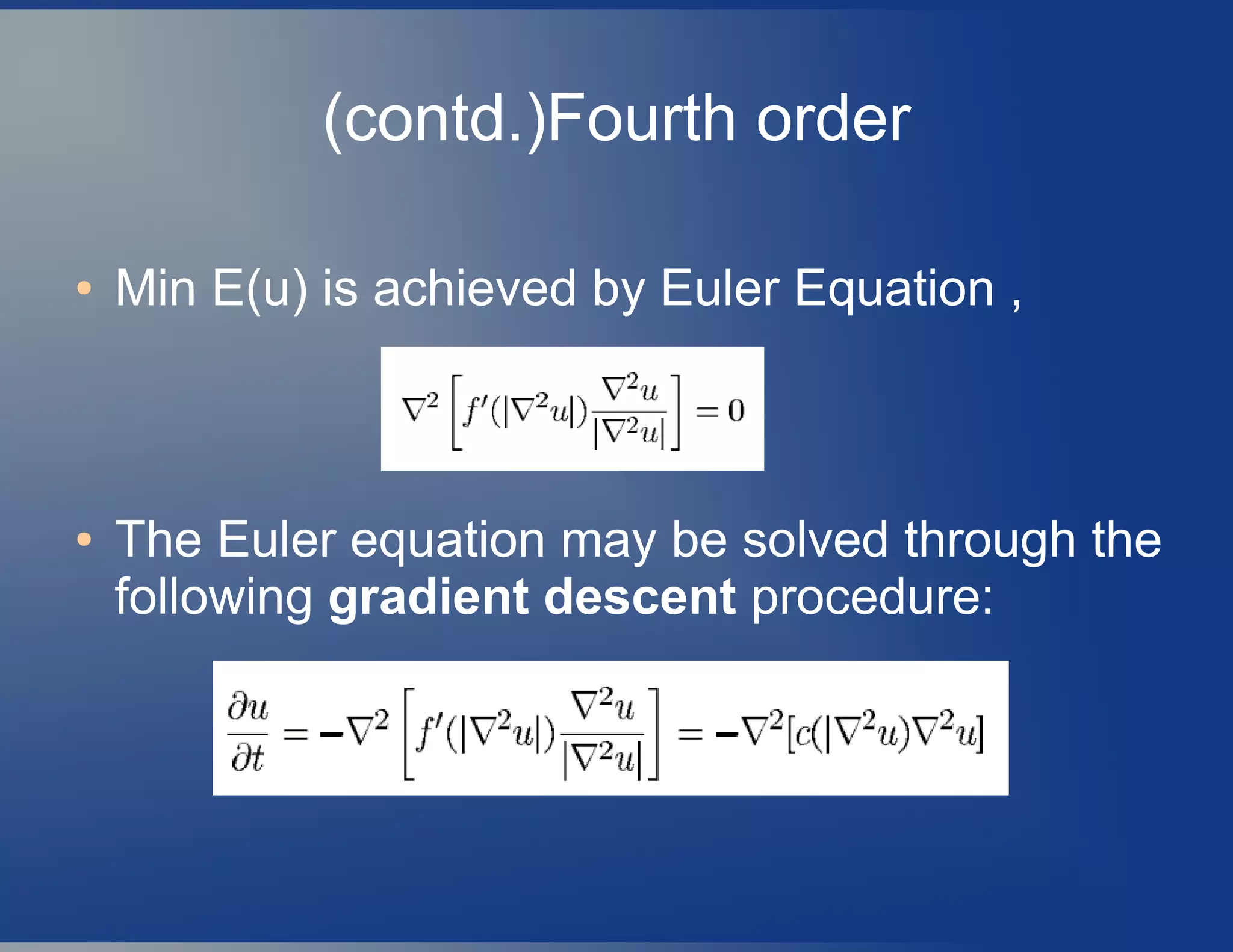
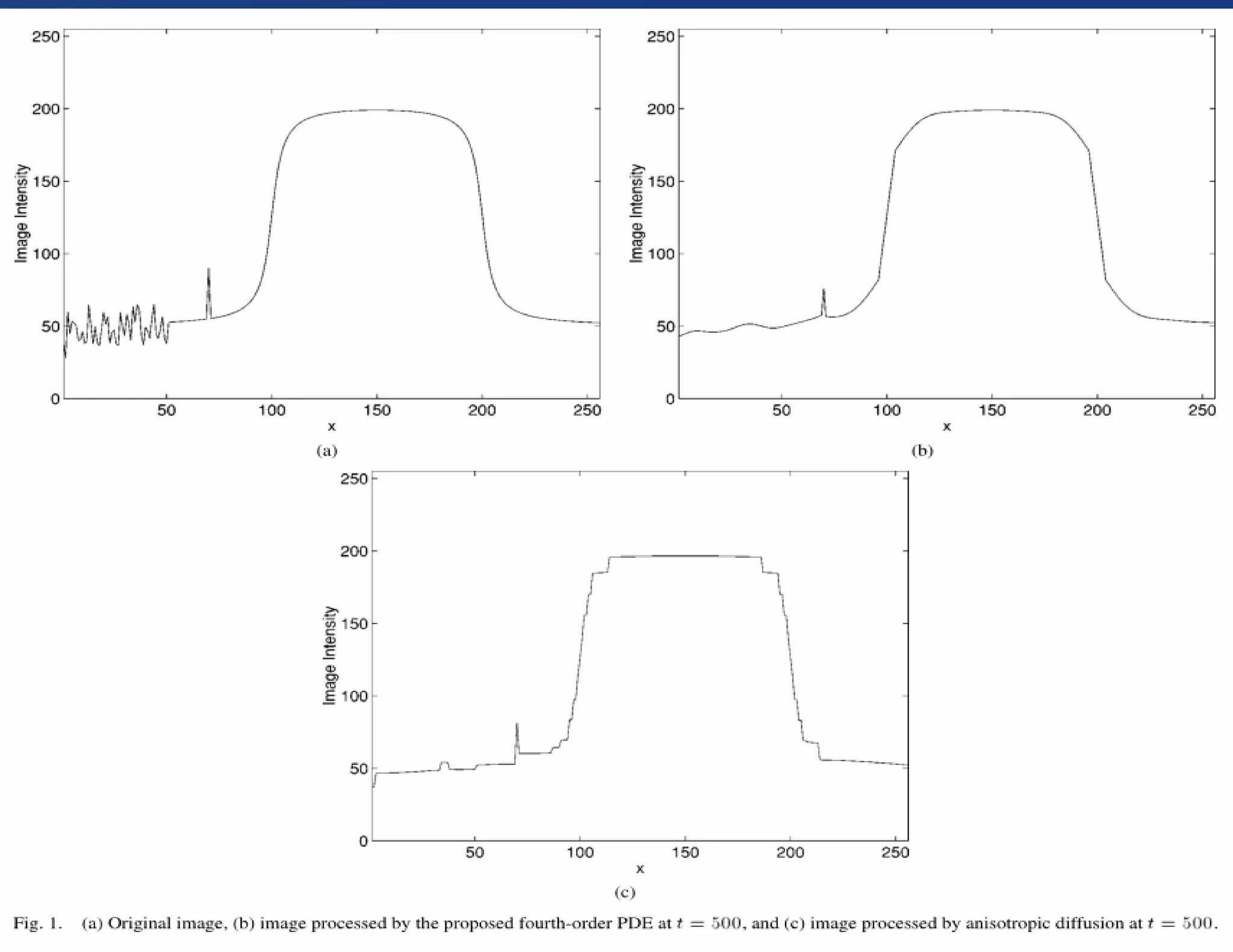
![It's extensions to fourth order
● [You,Kaveh,2000]:
Fourth order linear diffusion dampens
oscillations at high frequencies much faster
than second order diffusion.
● To avoid blocky effects while achieving good
tradeoff between noise removal and edge
preservation.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-30-2048.jpg)

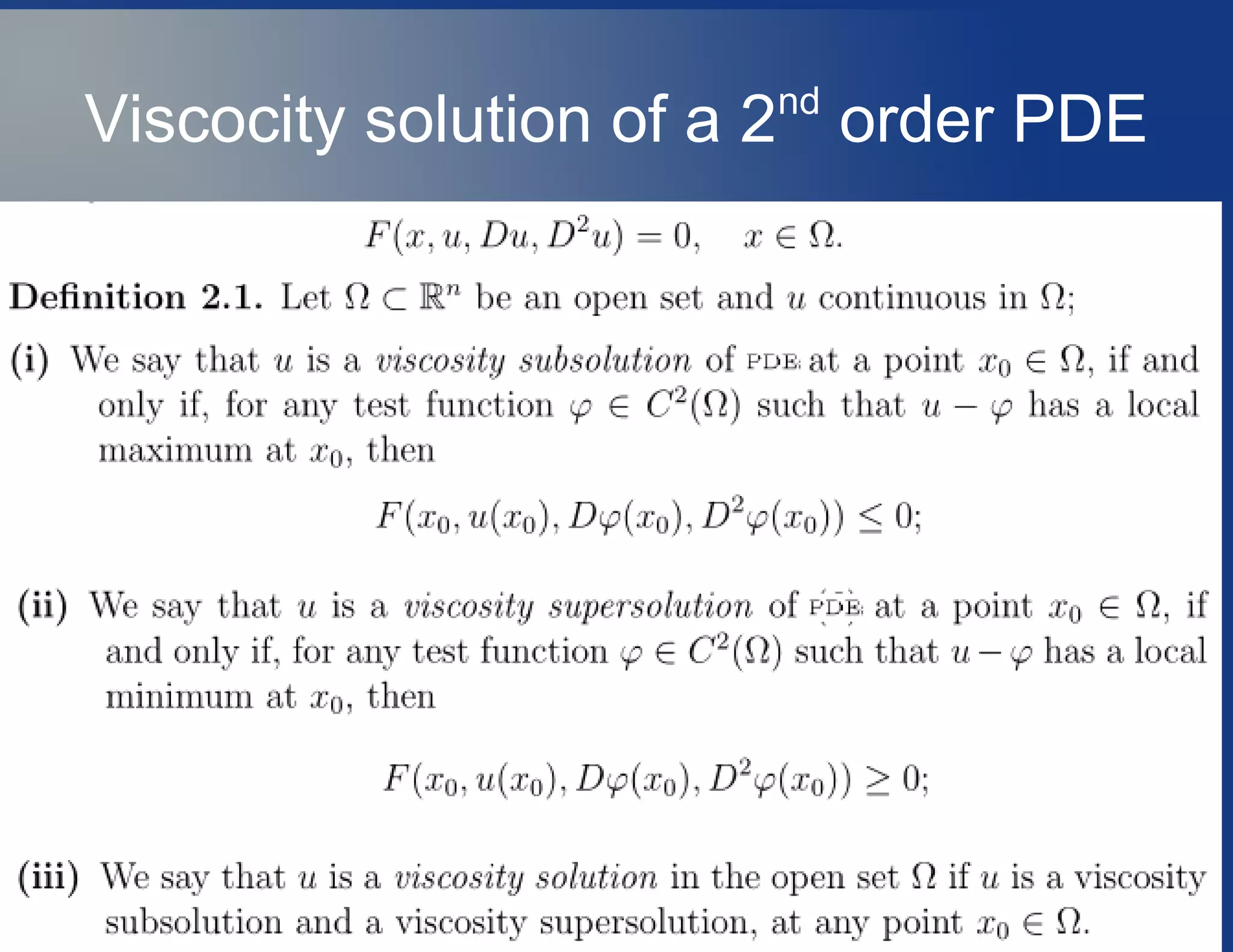
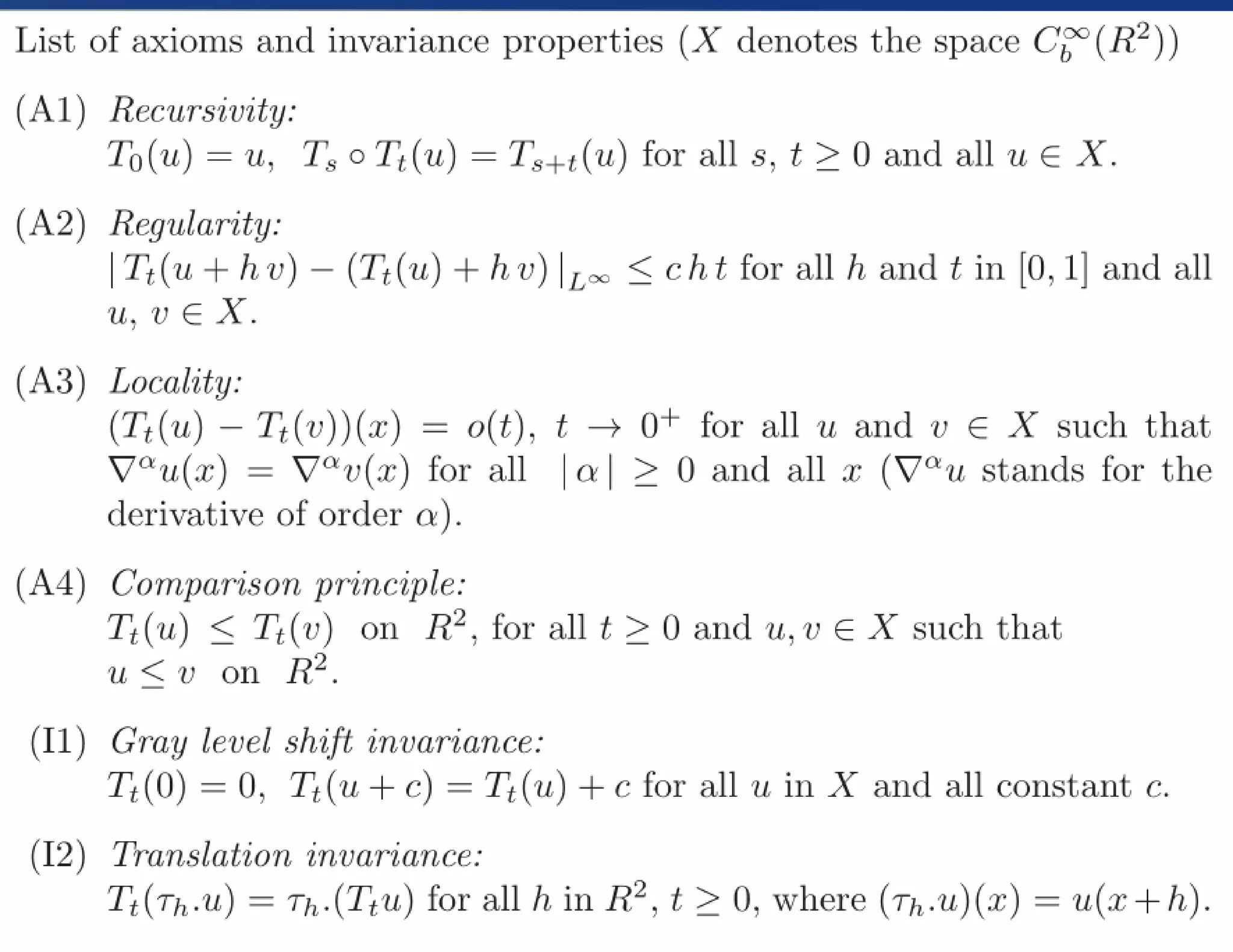
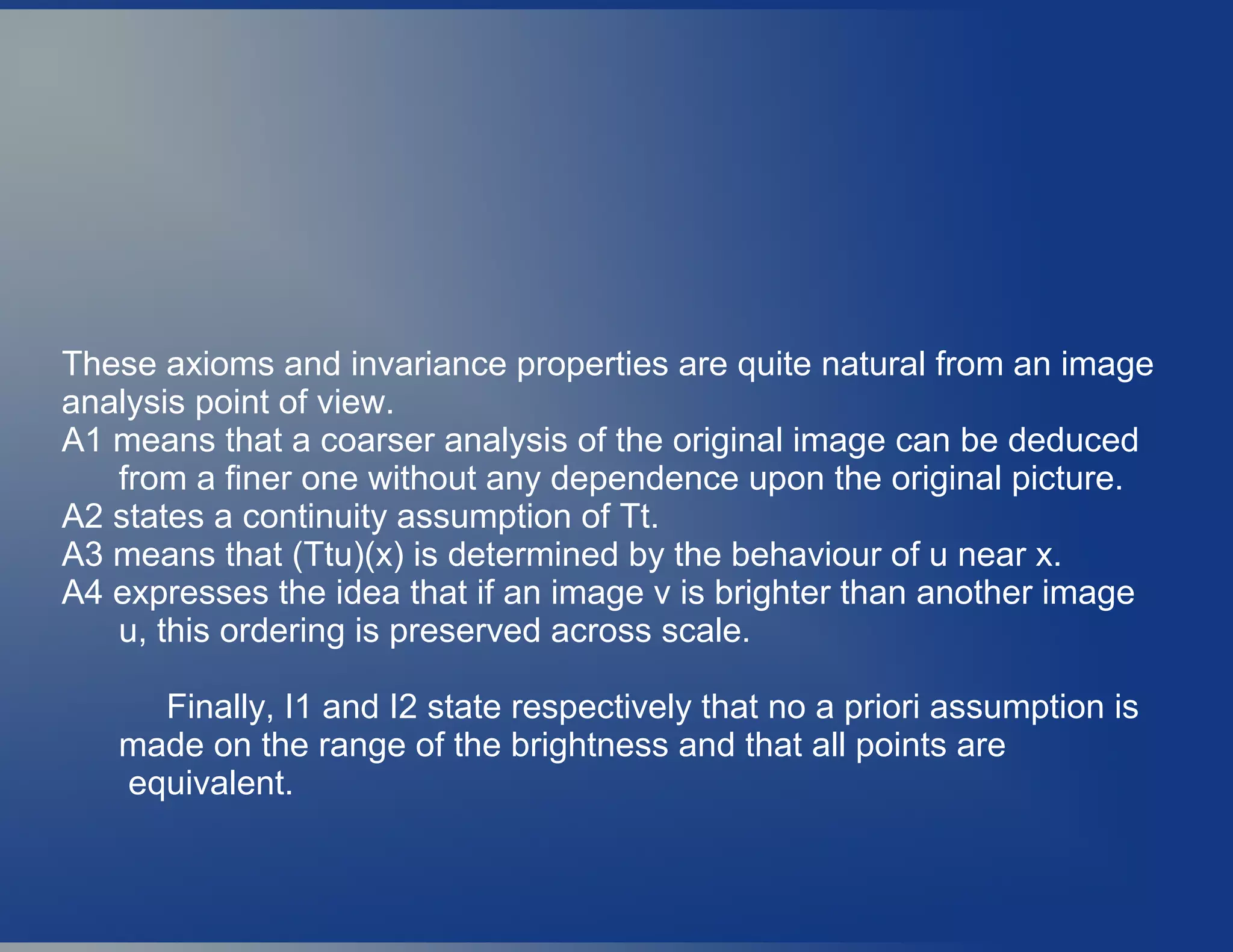
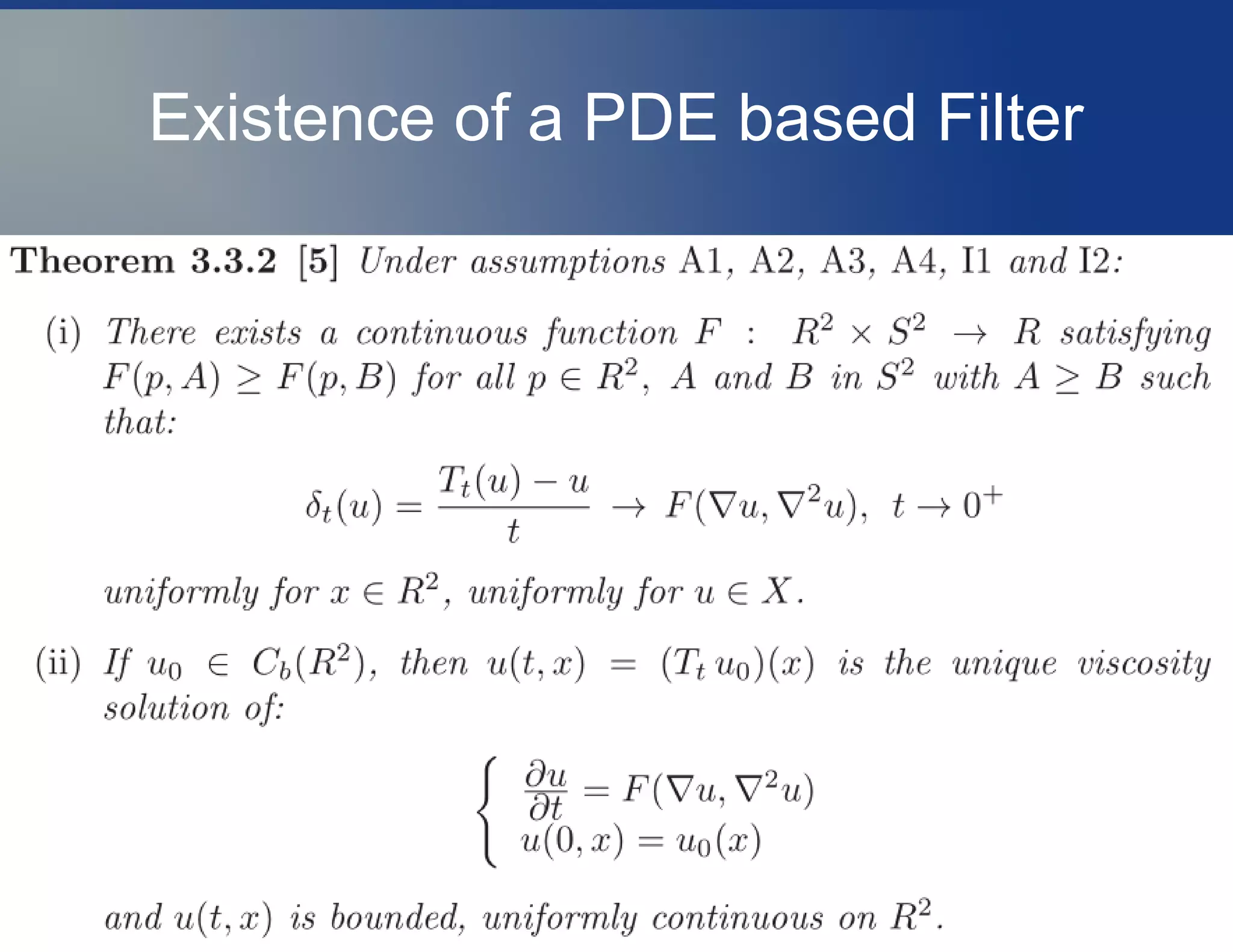
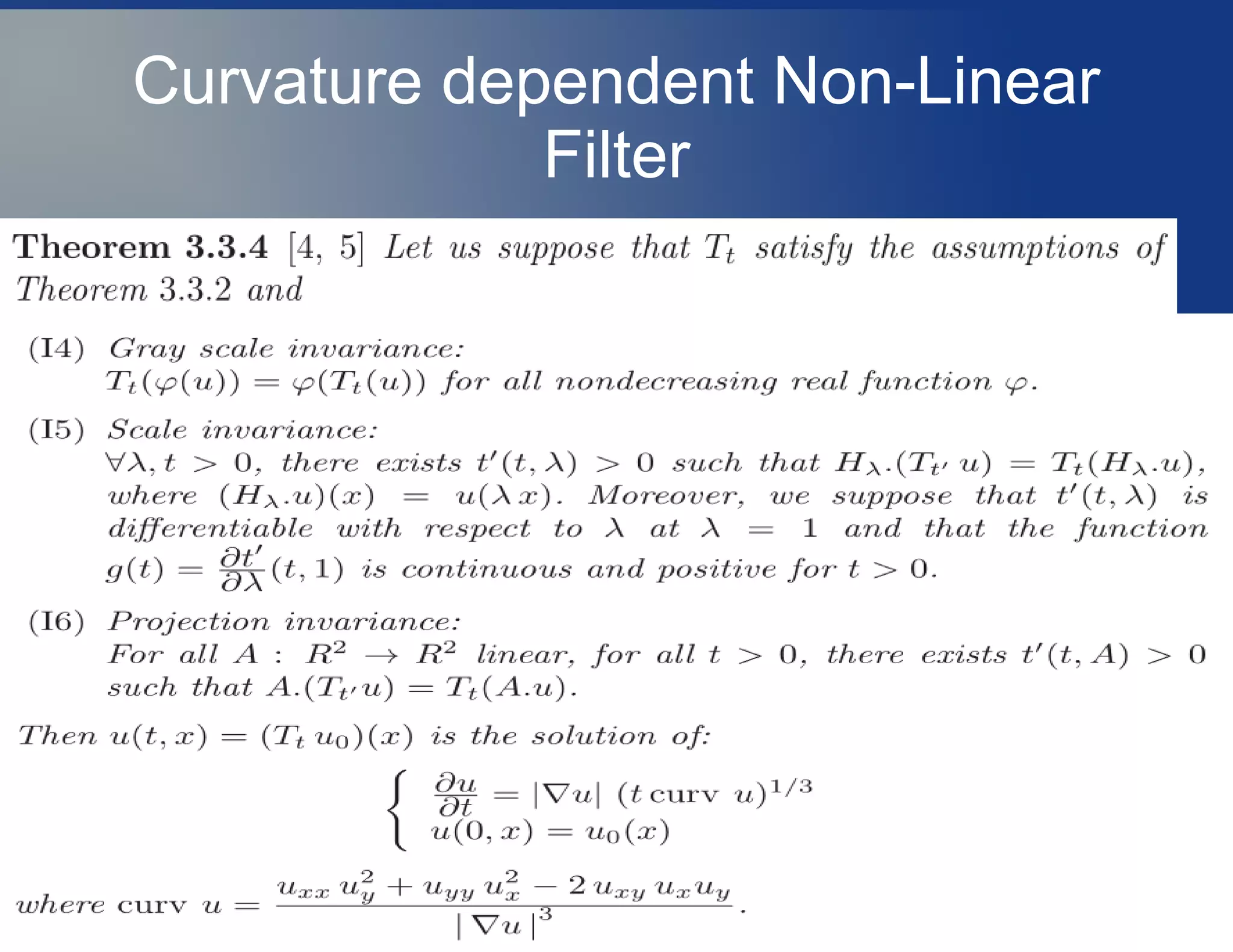
![The Alvarez-Guichard-Lions-Morel
scale space theory
● The remarkable work of [Alvarez et al]
establishes the connection between scale
space analysis and PDEs , rigorously.
● Starting from a very natural filtering
axiomatic (based on desired image properties)
they prove that the resulting filtered image
must necessarily be the viscosity solution of a
PDE.
● Some Basic Axioms that are very natural from
Image Processing Perspective are:](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-36-2048.jpg)
![Classical definition concerning the
well-posedness of a
minimization problem or a PDE.
● Definition[Hadamard]:
When a minimization problem or a PDE
admit a unique solution which depends
continuously on the data, we say that the
minimization problem or the PDE are well-
posed.
● If one of the following conditions: existence,
uniqueness or continuity fails, we say that the
minimization problem or the PDE are ill-posed.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-40-2048.jpg)
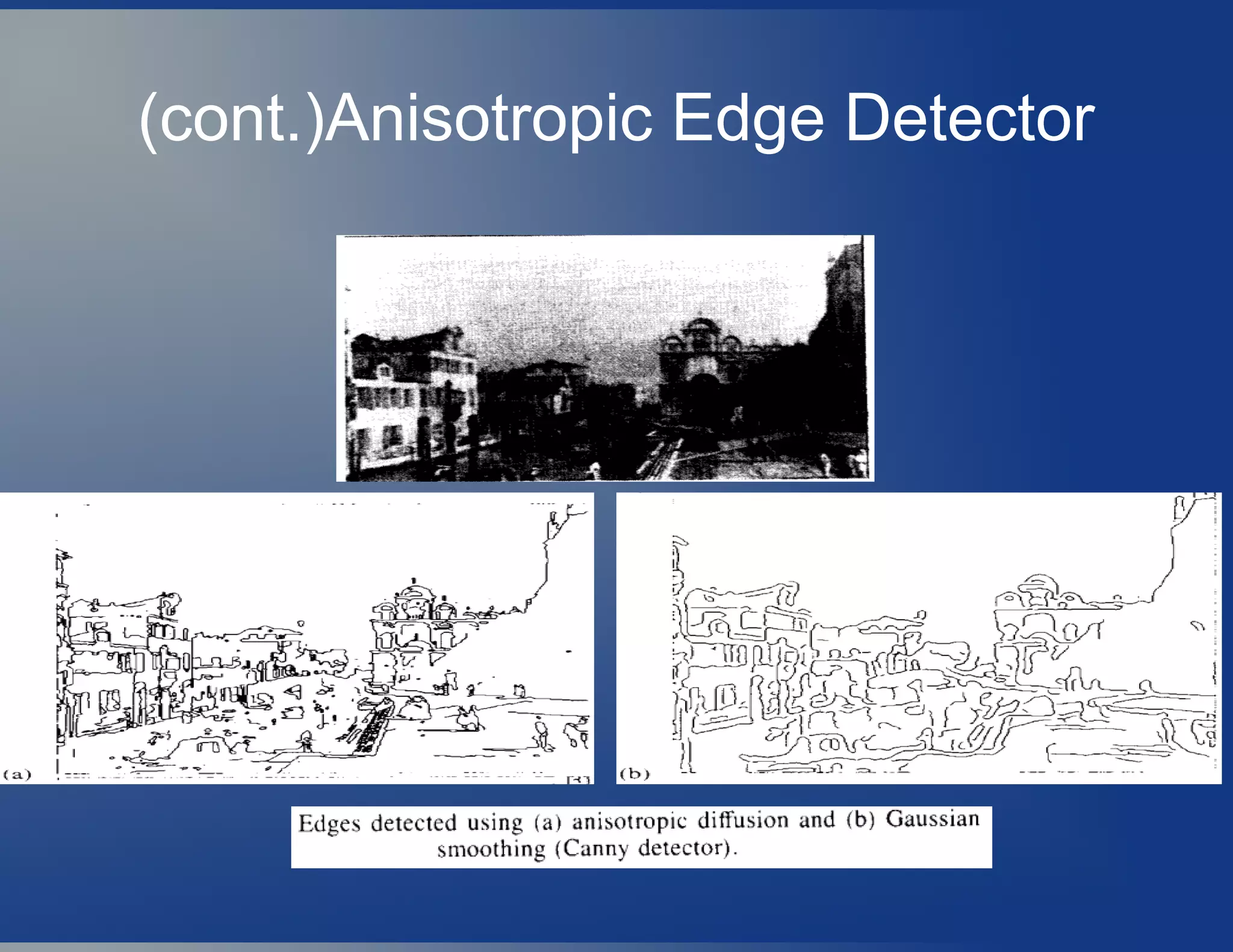
![Edge-Detector from Anisotrpic
Diffusion[Perona & Malik]
● [Canny,1986] Edge Detector:The image is convolved
with the directional derivatives of a Gaussian.
u→ *▽( ( , ,σ))|u G x y |
Requires a number of convolutions ,involve
blurring And complexity of combining outputs of filters
at multiple scales.
● Anisotropic E.detector : The complication of multiple
scale, multiple orientation filters is avoided by locally
adaptive smoothing.
● In this, the edges are made sharp by the diffusion
process, so that edge thinning and linking are almost
unnecessary.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-45-2048.jpg)

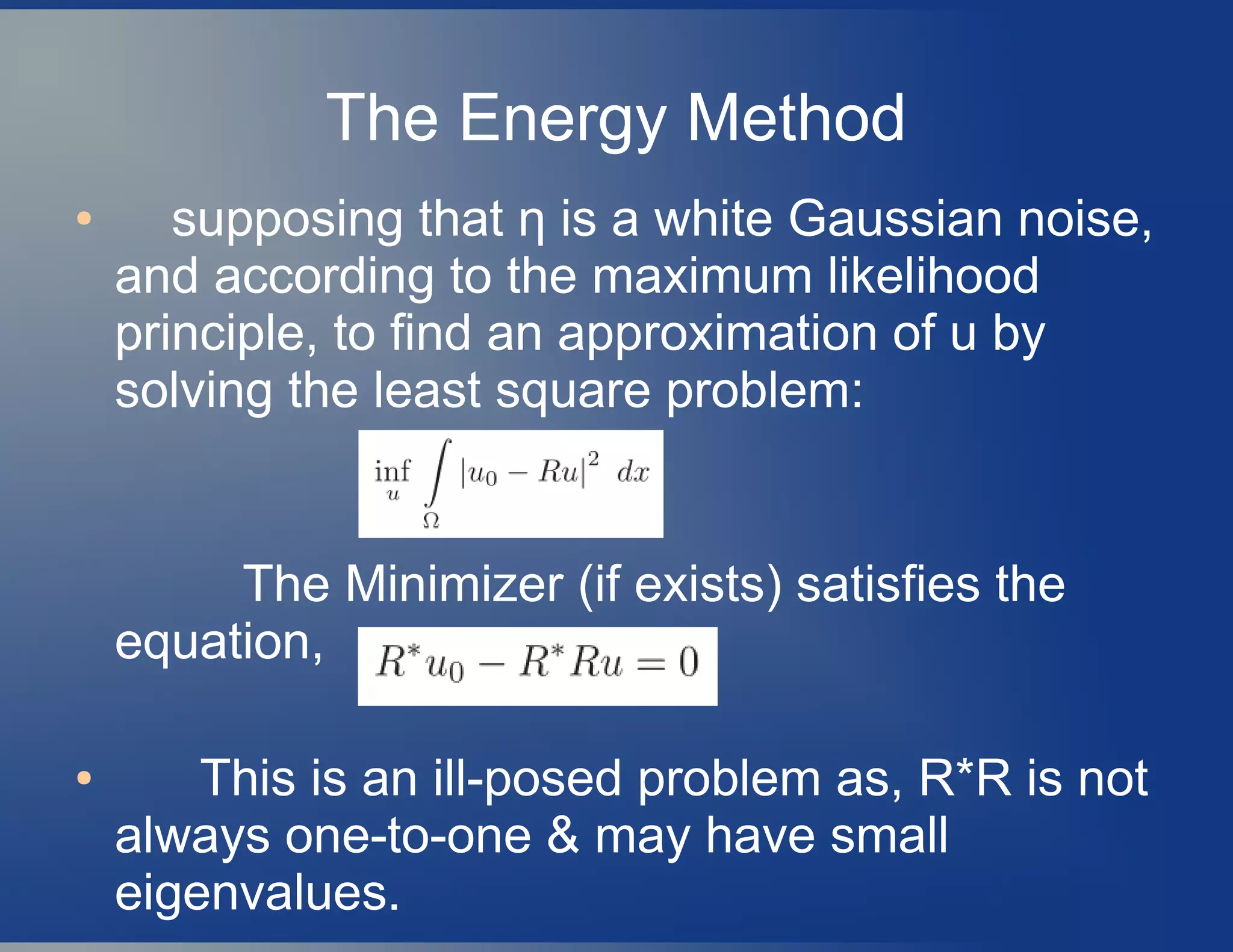
![Regularisation of the problem(ill-
posed)
● [Tikhonov and Arsenin,1977]:(data fidelity+smoothing)
in Functional Space,
● Solution characterized by the Euler-Lagrange
equation is,](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-51-2048.jpg)
![Total Variation (L1
-▽) Minimization
● As Laplacian Operator has very strong
isotropic smoothing properties , edges are not
preserved.
●
The Lp
norm with p = 2 of the gradient allows to
remove the noise but penalizes much of the
gradients(edges).
● [Rudin, Osher and Fatemi]: Decrease p in order to
keep as much as possible the edges.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-52-2048.jpg)
![Performance Metrics[wang, et. al]
● Figure of Merit Metric (FOM): (Edge
preserving measure)
where N^ and Nideal
are the total numbers of detected and original edge pixels,
respectively;
● di
is the Euclidean distance between the ith
detected edge pixel and
the nearest original edge pixel;
● λ is a constant typically set to 1/9.
● The dynamic range of FOM is between the processed image and the
ideal image.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-55-2048.jpg)
![Performance Metrics[wang, et. al]
● Structural Similarity Metric(SSIM):
Let x={xi
}; y={yi
} be the original and the test
images.
This quality index models any distortion as
a combination of 3 different factors:
loss of correlation,
luminance distortion, and
contrast distortion.
● The dynamic range of SIMM is [-1,1]](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-56-2048.jpg)
![Performance Metrics[wang, et. al]
● Mean Square Error Metric (MSE):
The smaller the MSE value, the better is the
denoising performance.
● SNR Metric:
when the denoised image has a large
SNR it will be closer to the original image and
will have a better quality.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-57-2048.jpg)
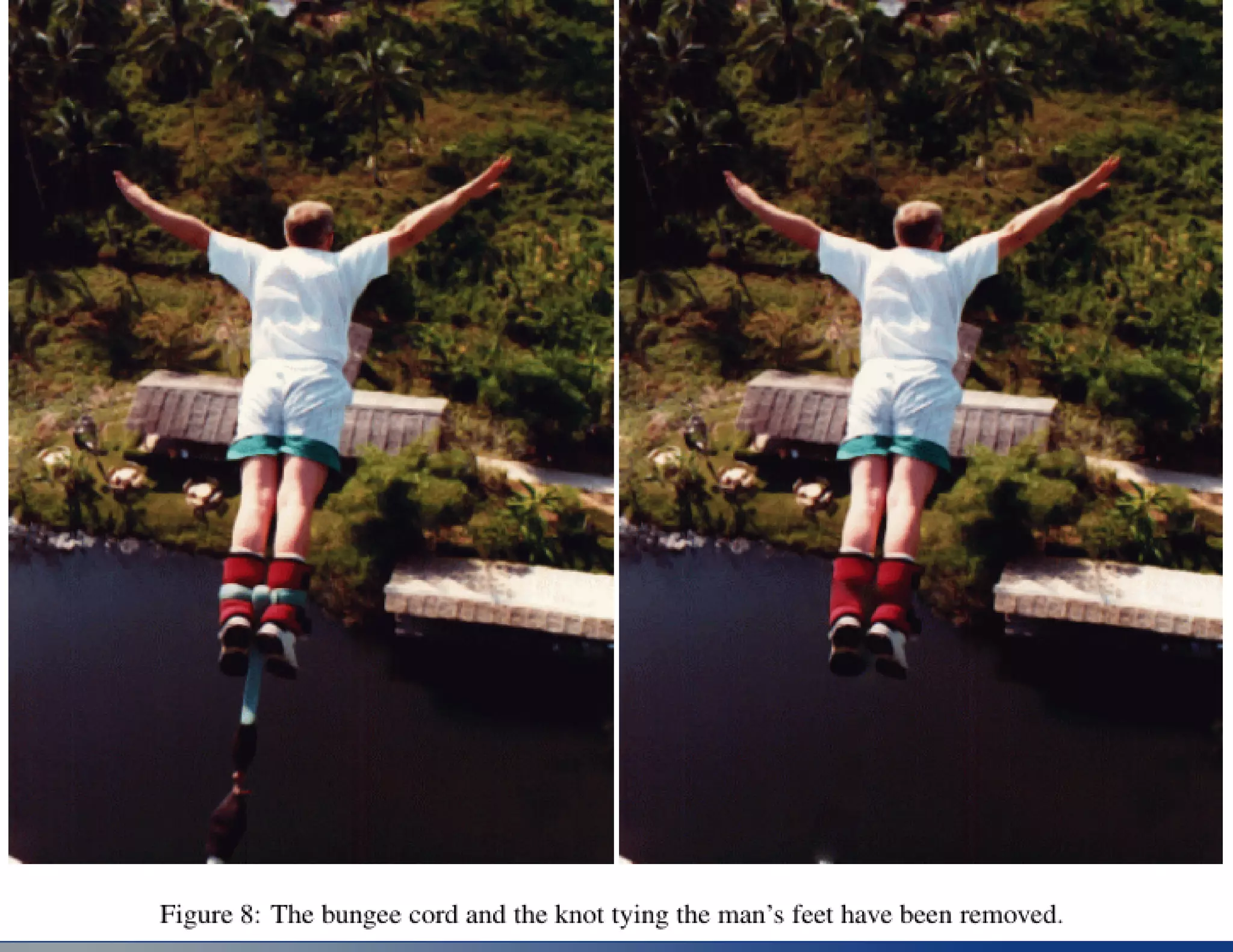
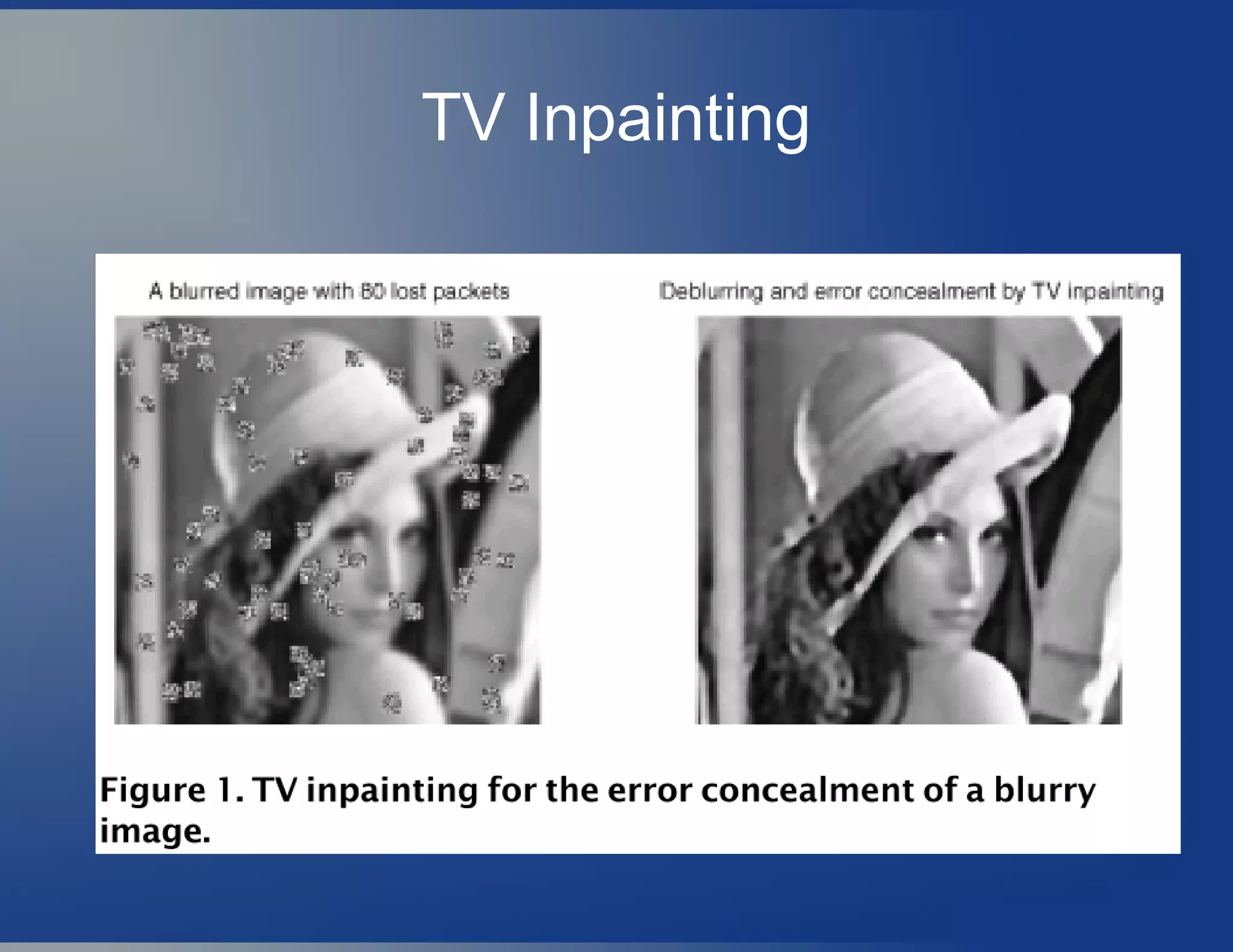
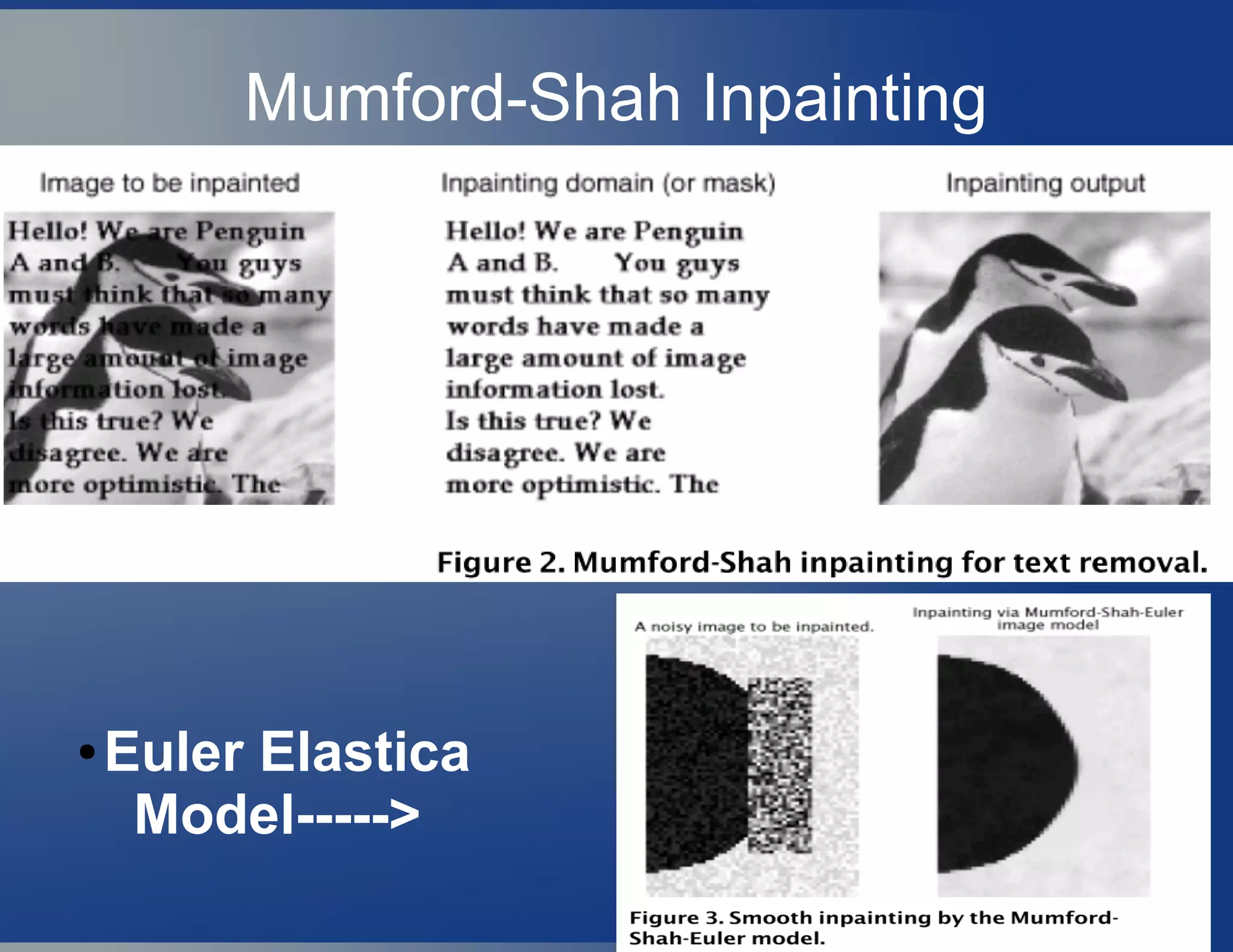
![Image Inpainting
● u0
denotes the observed(noisy or blurry) portion
of u, on a sub domain D. The goal of inpainting
is to recover u on the entire image domain Ω.
● A simple Geometric Model is , with blurring
followed by noise degradation and spatial
restriction.
where K is a continuous blurring kernel
(linear,shift-invariant), and η is an additive
white noise field assumed to be close to
Gaussian for simplicity &the information [u0
]ΩD
is missing.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-60-2048.jpg)
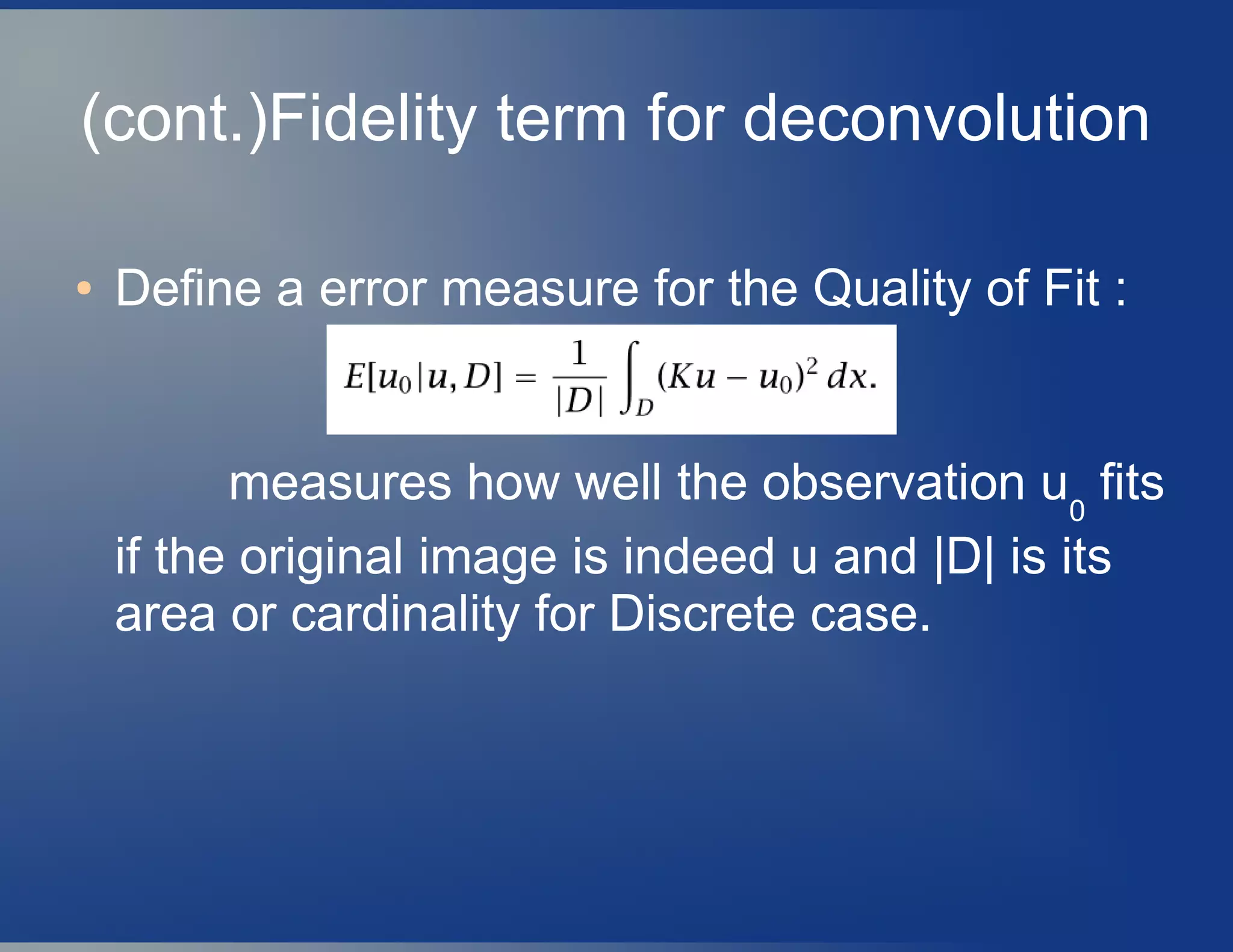
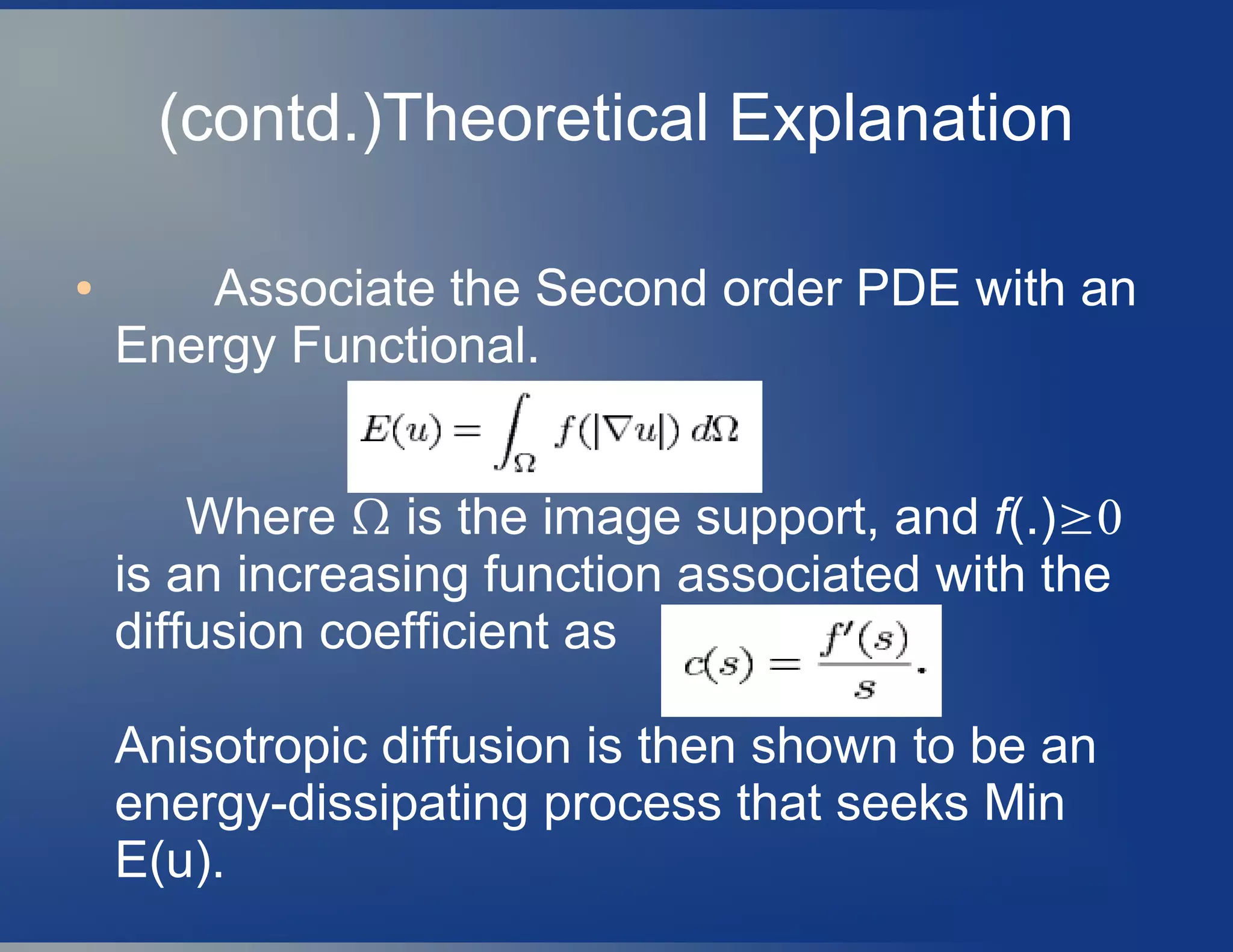
![(cont.)Regularity Condition E[u]
● Regularity of the new Image(u) is enforced
through The “energy” functionals: { E[u] }
● Then the Image Inpainting becomes a
constrained optimization problem:
min E[u] over all u such that E[u0
|u] ≤ σ2
Here σ2
(variance of the white noise), is
assumed to be known by proper statistical
estimators.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-62-2048.jpg)
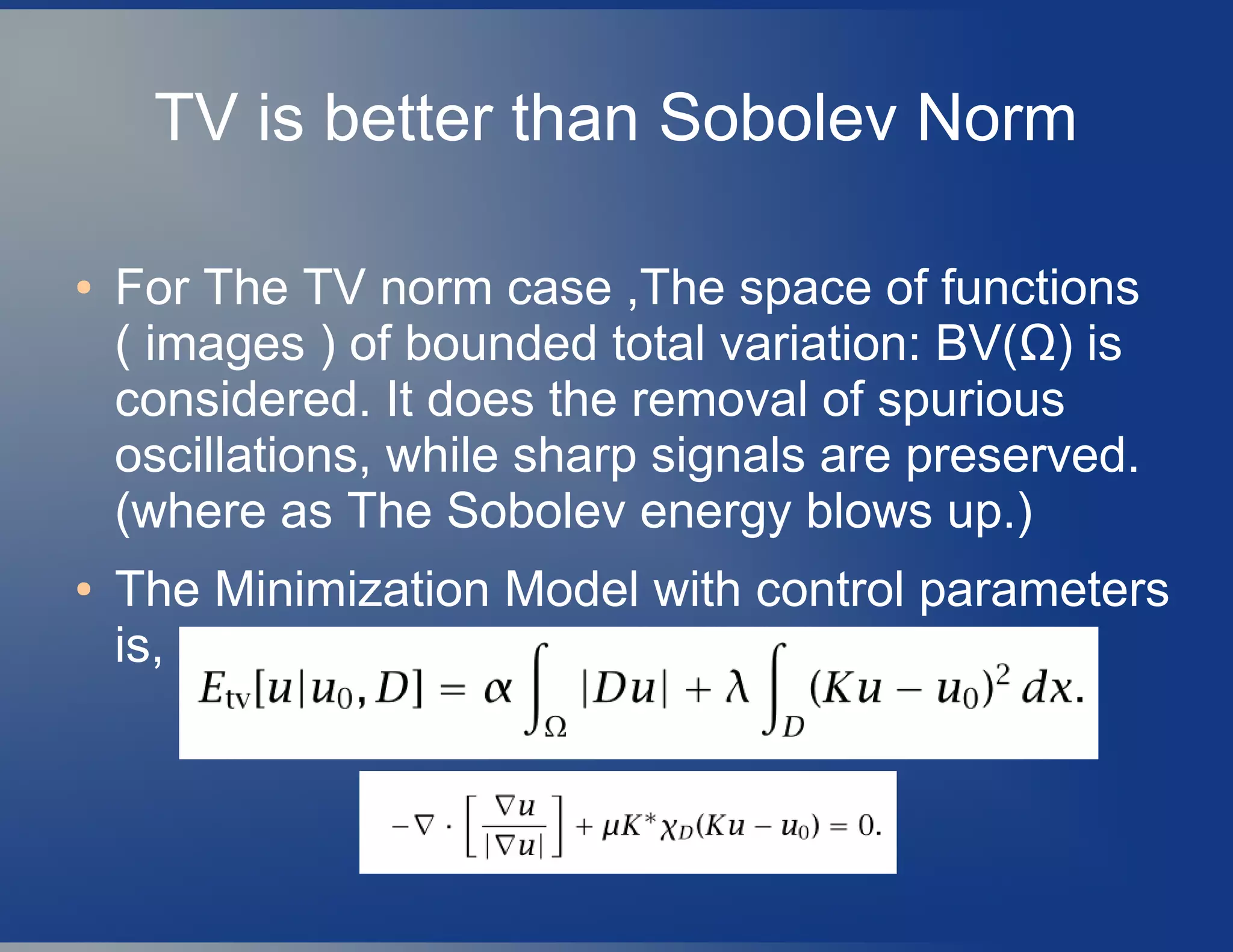
![Examples of E[u]
● Sobolev norm E[u] =∫Ω
| u|∇ 2
dx,
● The total variation (TV) model E[u] =∫Ω
|Du| of
Rudin, Osher, and Fatemi, and
● The Mumford-Shah free-boundary model
E[u,Γ] =∫ΩΓ
| u|∇ 2
dx + βH1
(Γ),
where H1
denotes the one-dimensional
Hausdorff measure.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-63-2048.jpg)
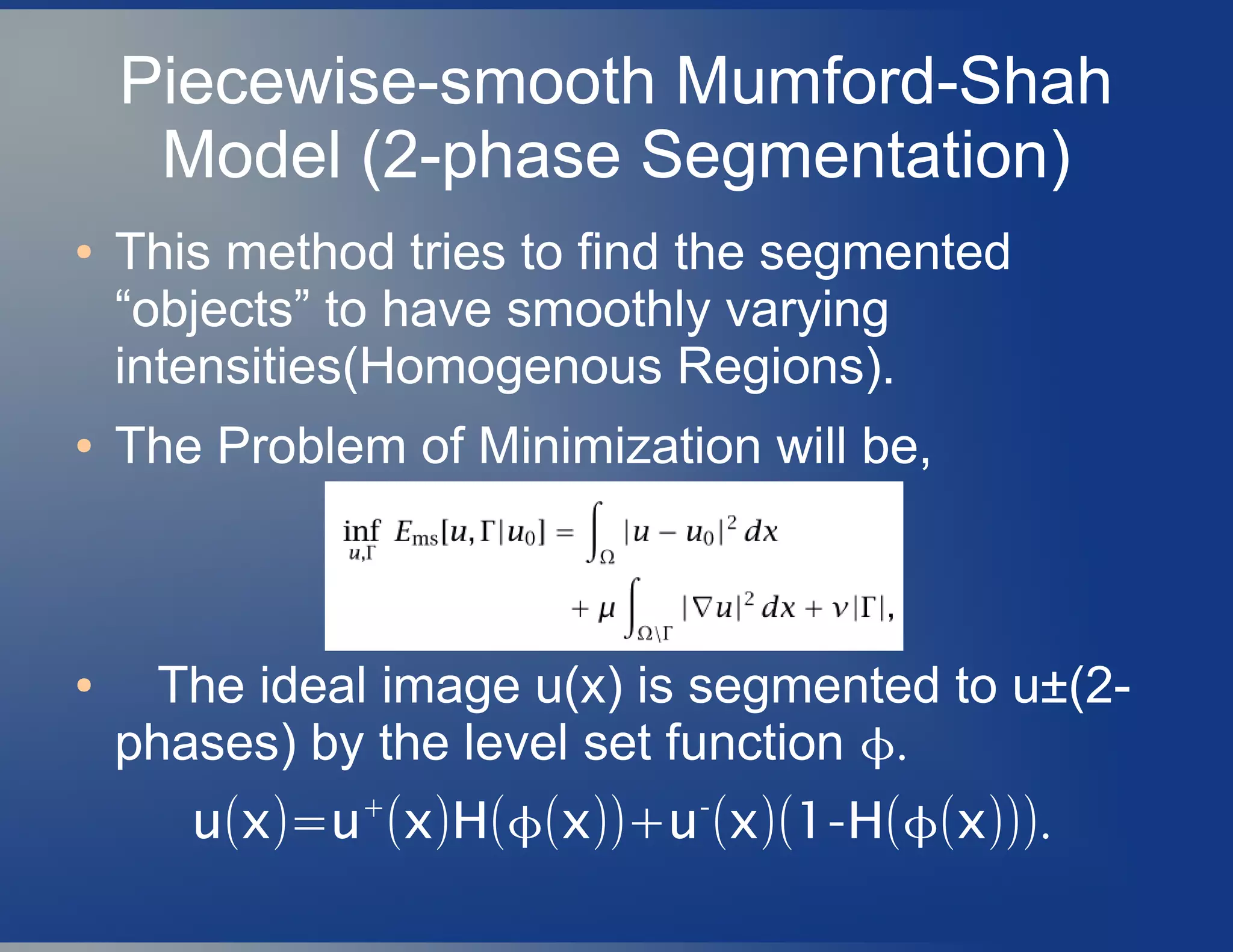
![The object-edge model [Ems
]
[Mumford and Shah]
● An image u is understood as a combination of
both the geometric feature Γ and the
piecewise smooth “objects” ui
on all the
connected components Ωi
of Ω Γ , assuming
Γ to be Lipschitz. And the smoothness of the
“objects” characterized by Sobolev Norm.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-66-2048.jpg)
![(cont.)Higher-order geometric
Image Models
● [Esedoglu and Shen]: For large-scale
inpainting problems, high-order image models
which incorporate the curvature information
become necessary for more faithful visual
effects.
Replacing length energy by Euler's
elastica Energy:
● The curvature is given by](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-67-2048.jpg)
![(First Stage) Denoising the regions
●
Assuming, both u+ and u- are C1
functions up
to the boundary { = 0} ,Minimize the Energy ,
● First, with fixed, the variation on E[u+,u-,|
u0
] leads to the two Euler-Lagrange equations
for u± separately. These act as denoising
operators on the homogeneous regions
only,not on edge set{=0}](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-71-2048.jpg)
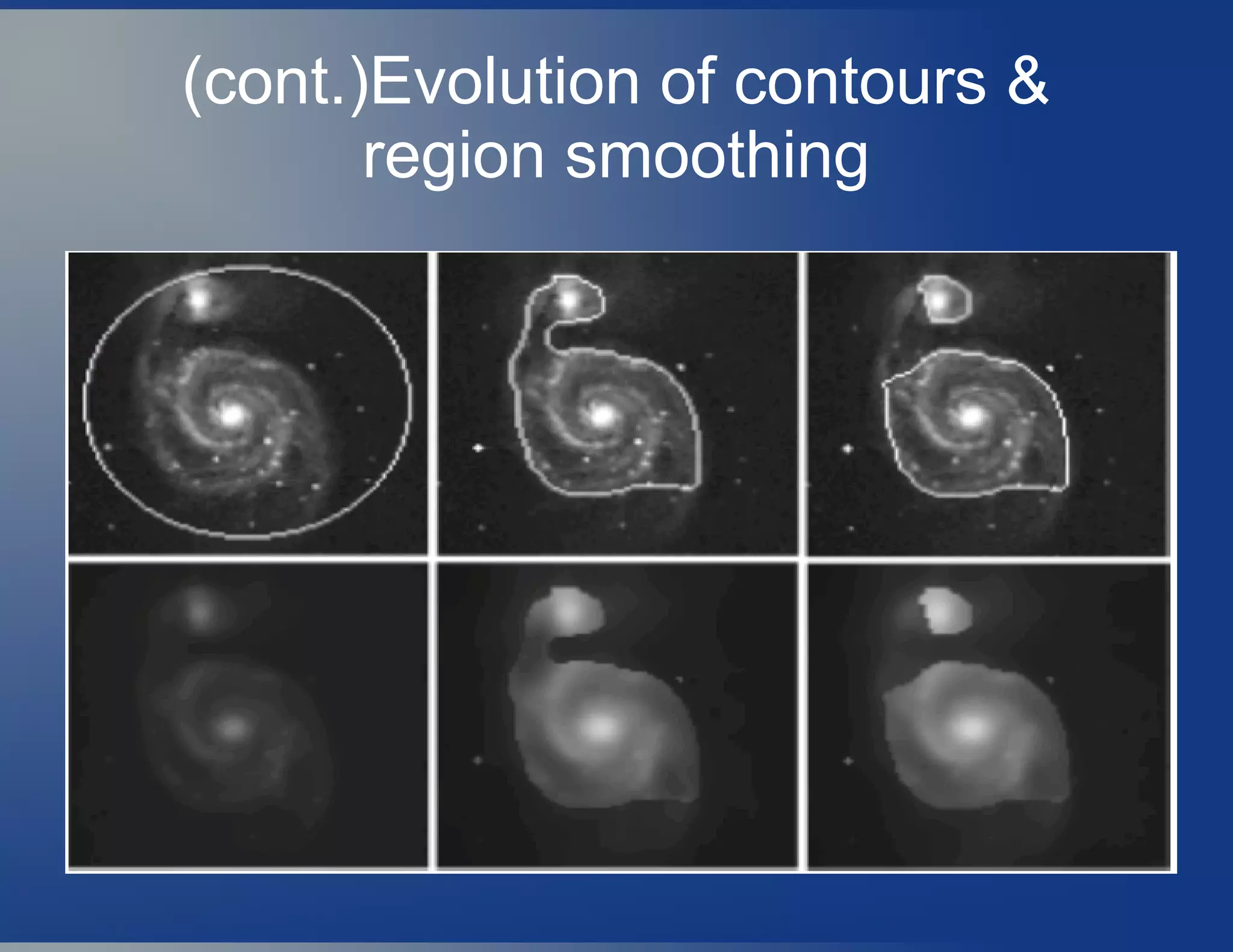
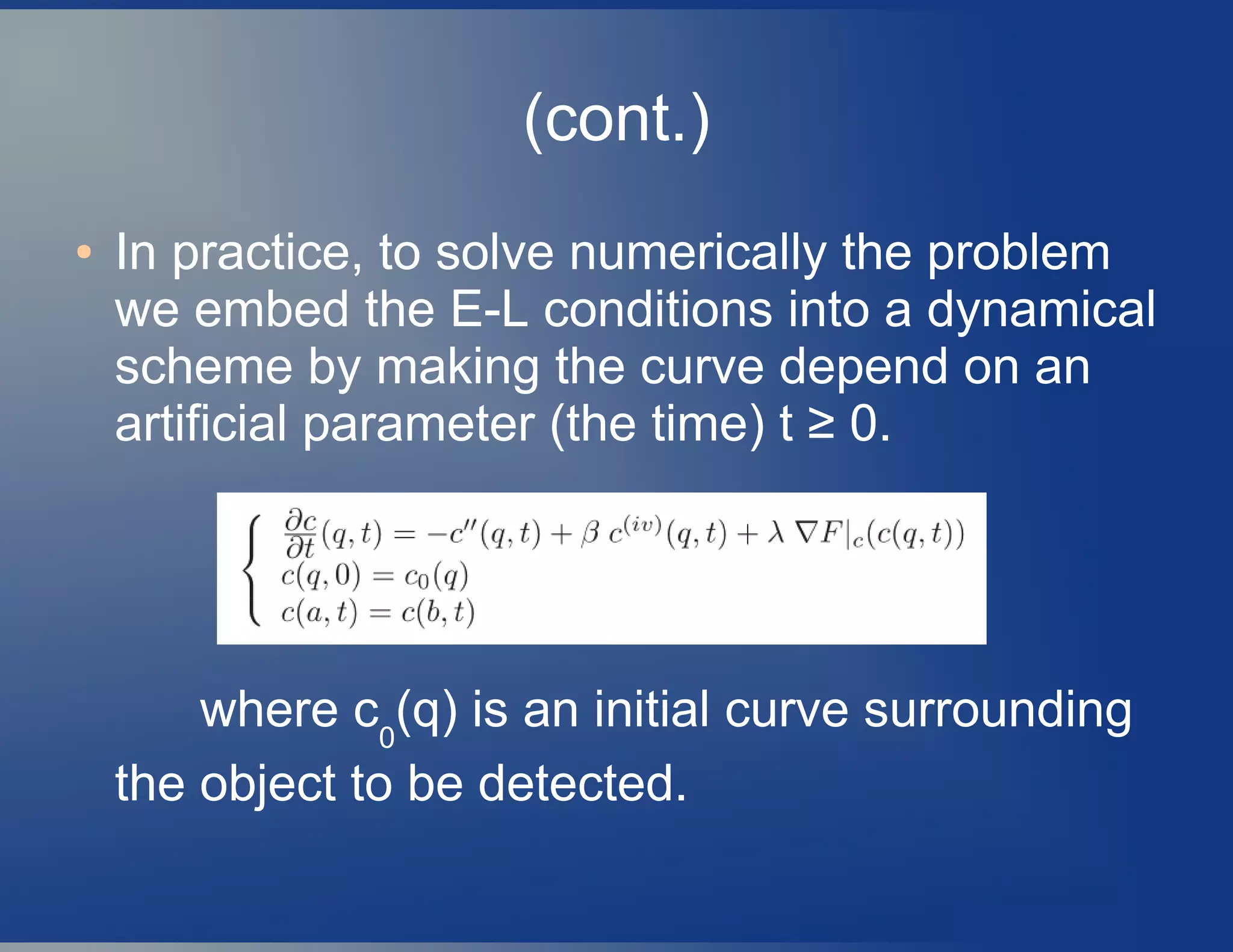
![(Second stage)Contour evolution
● Next, keeping the functions u+ and u- fixed
and minimizing E[u+,u-,|u0] with respect to
, we obtain the motion of the zero-level set
with some initial guess (t=0,x).
This single model, which includes both the
original energy formulation And the elliptic and
evolutionary PDEs ,naturally combining all
three image processors —active contour,
segmentation, and denoising.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-72-2048.jpg)
![Active contours without Edges(snakes)
[The Kass-Witkin-Terzopoulos]
Unlike the Mumford and Shah functional, the aim is
no longer to find a partition of the image but to
automatically detect contours of objects,starting from a
initial guess and g(s),an Edge-detector function.
Working: Boundary detection consists in matching a
deformable model to an image by means of energy
minimization.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-76-2048.jpg)

![DT-MRI[Denis Le Bihan]
● THE BASIC PRINCIPLES of diffusion MRI were
introduced in the mid-1980s [Taylor et al,1985]; they
combined NMR imaging principles with those
introduced earlier to encode molecular diffusion
effects in the NMR signal by using bipolar magnetic
field gradient pulses .
● Molecular diffusion refers to the random translational
motion of molecules, also called Brownian motion, that
results from the thermal energy carried by these
molecules.
● These random, diffusion driven displacements
molecules probe tissue structure at a microscopic
scale well beyond the usual image resolution:](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-84-2048.jpg)
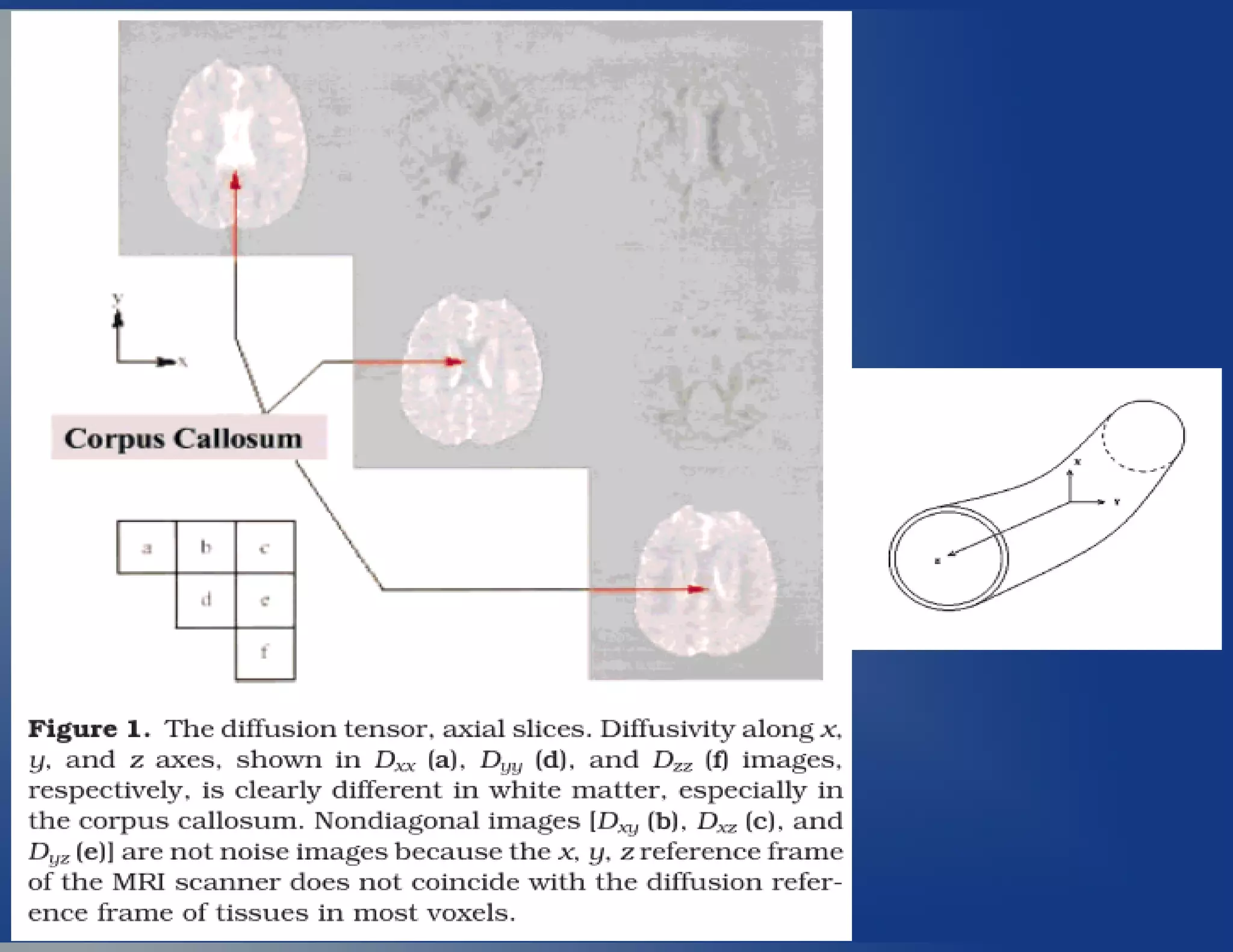
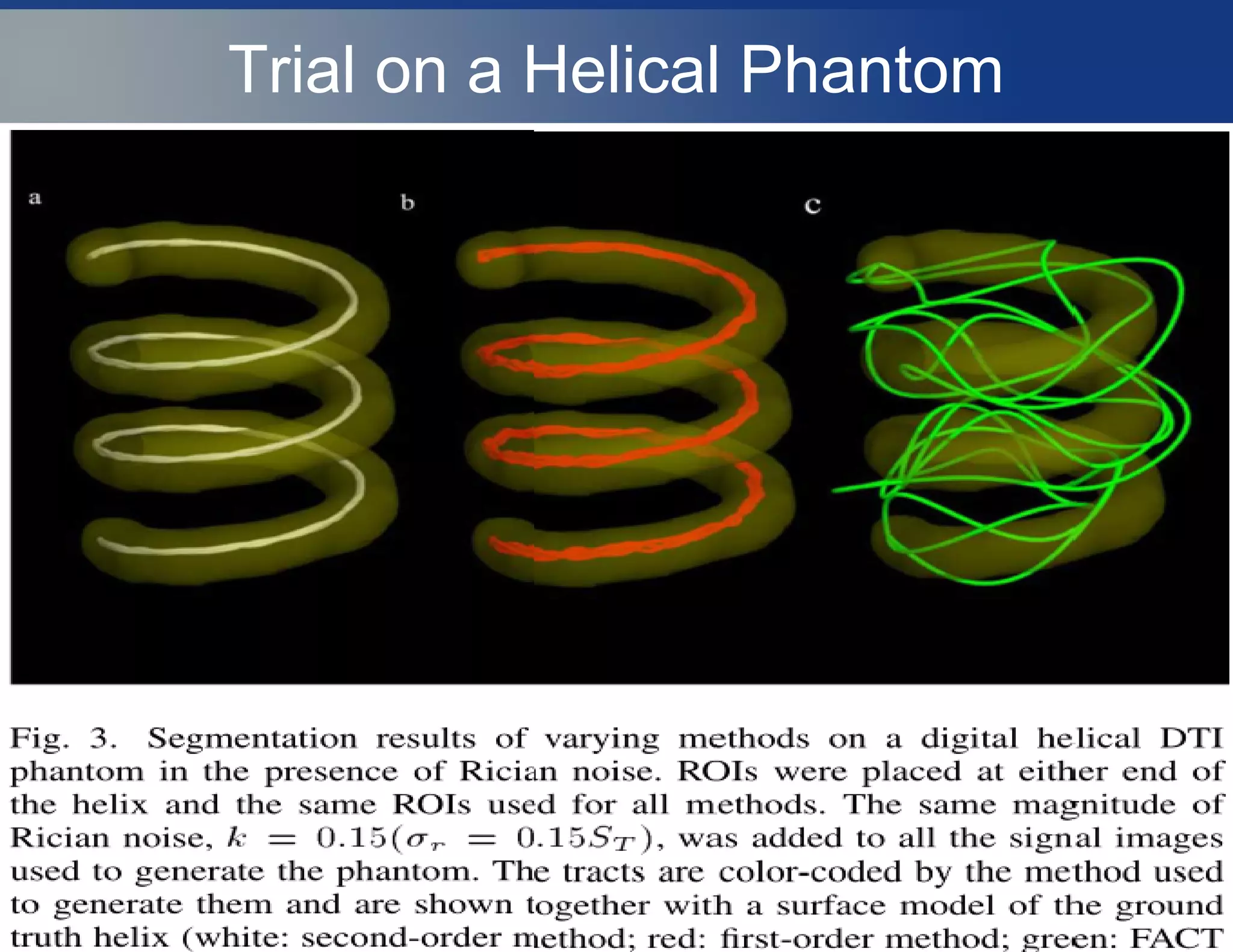
![Fibre Assignment by Continuous
Tracking(FACT)
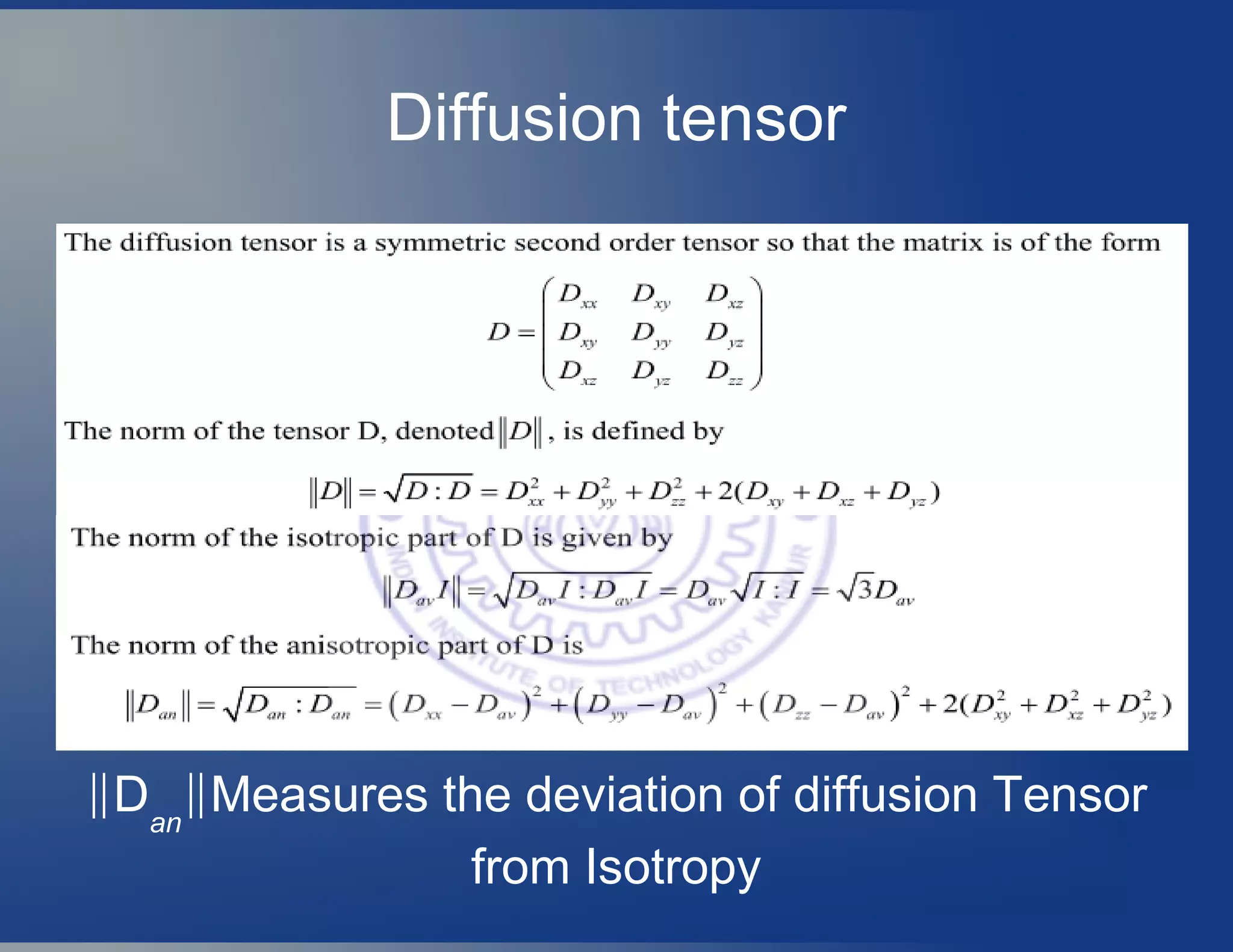
● Each Voxel at postion (x,y,z) is characterized
by Second order diffusion Tensor D which
represents the local 3D anisotropic Gaussian
diffusion process
● To infer continuity of Fibre orientation from
voxel to voxel and to reconstruct the
connections between the brain regions
[Basser et al,2000] , a 3D-arc length
parametrized trajectory r(s) ,has been
proposed as , and is solved
for r(s) ,starting from a seed
position r0
=r(s0
).](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-91-2048.jpg)
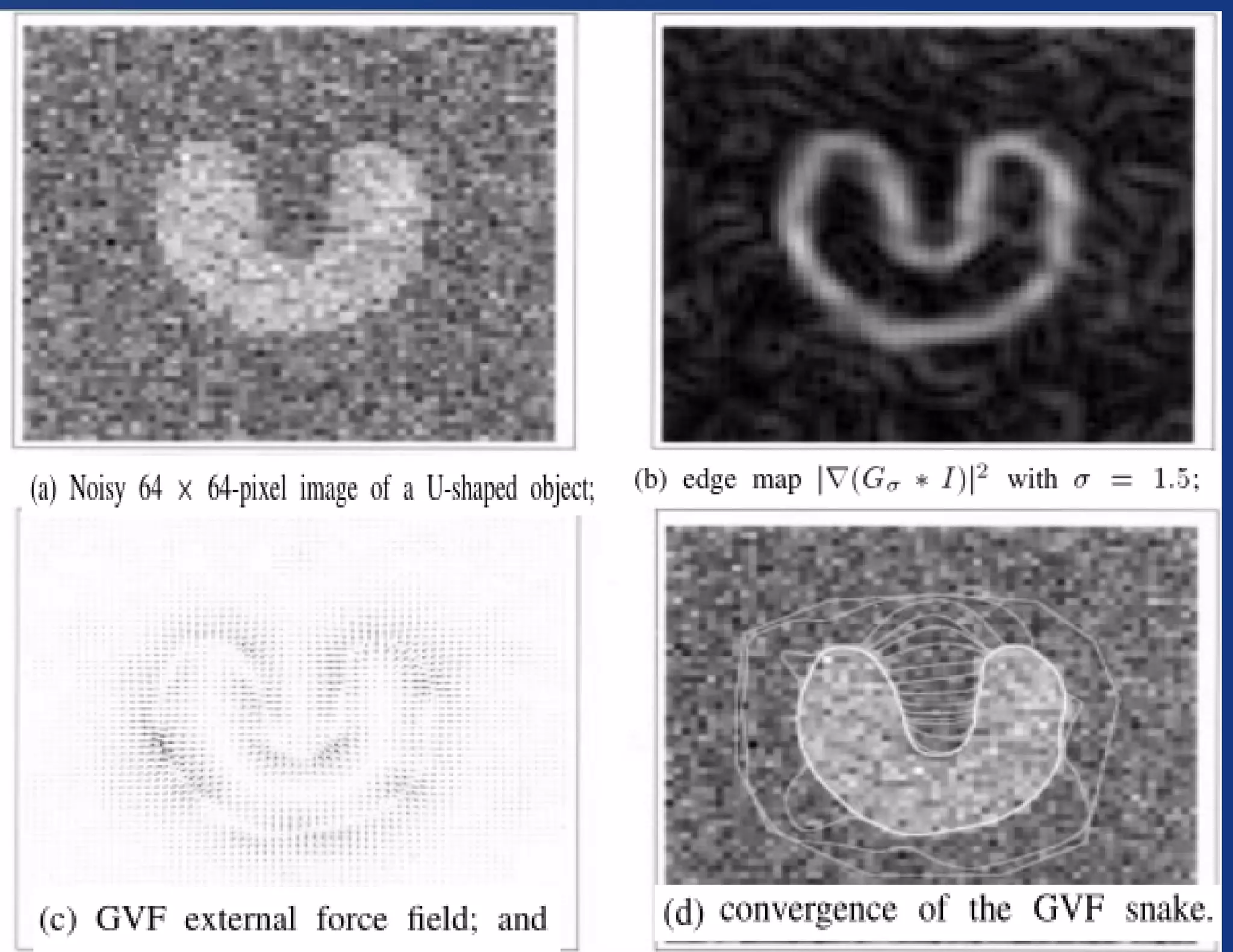
![Gradient Vector Flow(GVF)
(new external force for Snakes )
● [Xu et. al,1998]-Define the gradient vector flow
field to be the vector field Φ(x,y)=[u(x,y),v(x,y)]
that minimizes the energy functional ,
where f is the fluid volume & when |▽f| is
large, the 2nd
term dominates the integrand, and
is minimized by setting Φ=▽ ,f producing the
desired effect of keeping Φ(x,y) nearly equal to
the gradient of the edge map and also forcing
the field to be slowly-varying in homogeneous
regions.](https://image.slidesharecdn.com/stateofartpdebasediptobt-vijayakrishnarowthu-200130042139/75/State-of-art-pde-based-ip-to-bt-vijayakrishna-rowthu-94-2048.jpg)














































![[BDD 2025 - Mobile Development] Crafting Immersive UI with E2E and AGSL Shade...](https://cdn.slidesharecdn.com/ss_thumbnails/md-craftingimmersiveuiwithe2eandagslshaderveronicaputrianggraini-251124030840-0c677f44-thumbnail.jpg?width=640&height=640&fit=bounds)


![[BDD 2025 - Mobile Development] Exploring Apple’s On-Device FoundationModels](https://cdn.slidesharecdn.com/ss_thumbnails/md-exploringappleson-devicefoundationmodels-251124030840-d690542c-thumbnail.jpg?width=640&height=640&fit=bounds)





![[BDD 2025 - Artificial Intelligence] AI for the Underdogs: Innovation for Sma...](https://cdn.slidesharecdn.com/ss_thumbnails/ai-aifortheunderdogsinnovationforsmallbusinesses-251124030839-72a599a4-thumbnail.jpg?width=640&height=640&fit=bounds)









