State-Dependent Conformal Perception Bounds for Neuro-Symbolic Verification
1.
State-Dependent Conformal PerceptionBounds
for Neuro-Symbolic Verification
Thomas Waite1
, Yuang Geng2
, Trevor Turnquist2
, Ivan Ruchkin2
*, Radoslav Ivanov1
*
1
Rensselaer Polytechnic Institute
2
University of Florida
* Co-last authors: equal contribution in supervision
July 21, 2025 — Zagreb, Croatia — co-located with CAV’25
3rd TACPS workshop
Supported by the NSF CPS Grants CCF-2403615 and CCF-2403616
2.
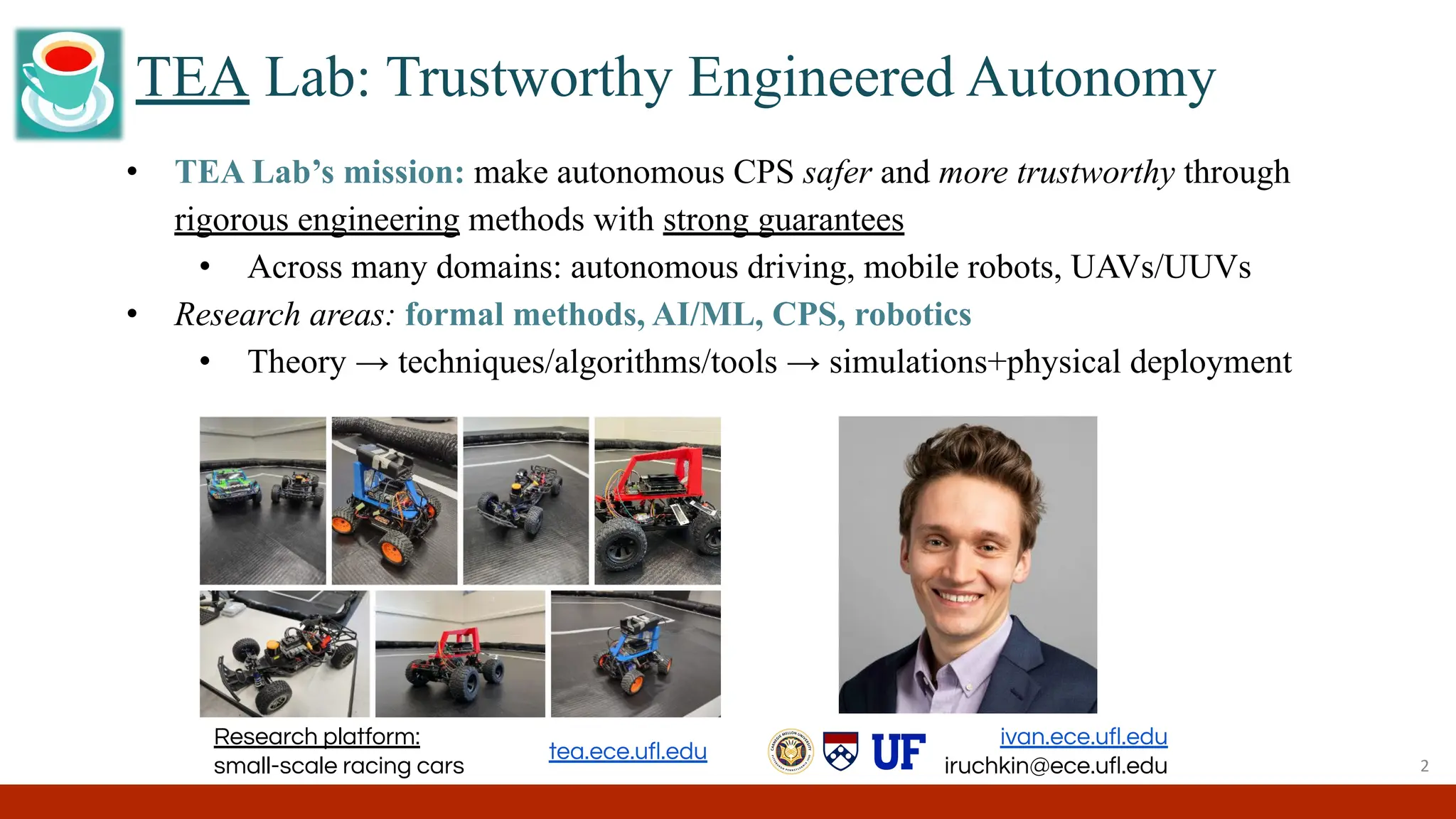
• TEA Lab’smission: make autonomous CPS safer and more trustworthy through
rigorous engineering methods with strong guarantees
• Across many domains: autonomous driving, mobile robots, UAVs/UUVs
• Research areas: formal methods, AI/ML, CPS, robotics
• Theory → techniques/algorithms/tools → simulations+physical deployment
TEA Lab: Trustworthy Engineered Autonomy
tea.ece.ufl.edu
2
Research platform:
small-scale racing cars
ivan.ece.ufl.edu
iruchkin@ece.ufl.edu
3.
• 2006–2011: Undergrad@ Moscow State University
• Moscow, Russia — applied math & computer science
• Industry and government roles
• AFRL VFRP, NASA JPL, CMU SEI, Google Summer of Code, …
• 2011–2018: PhD @ Carnegie Mellon University
• Pittsburgh, PA — software engineering & formal methods
Ivan Ruchkin: Brief Bio
3
• 2018–2022: Postdoc @ University of Pennsylvania
• Philadelphia, PA — guarantees for learning-enabled systems
• 2022–present: Assistant professor @ University of Florida
• Gainesville, FL — trustworthy methods for autonomy
4.
Motivation: Safety forNeural CPS
• Modern cyber-physical systems use advanced neural perception & control,
but lack safety guarantees
• Existing approaches attempt to bridge neural perception & verification, but
suffer from excessive conservatism and confidence decay over time
4
5.
Perception-driven Systems
Major Question:
Howdo we provide tight,
high-confidence safety guarantees for
perception-driven systems?
5
Original Blurred
[ T. Waite, Y. Geng, T. Turnquist, I. Ruchkin, R. Ivanov, “State-Dependent Conformal
Perception Bounds for Neuro-Symbolic Verification of Autonomous Systems”, NeuS 2025 ]
Related Work
• Vanillaconformal prediction (CP) leads to overly conservative guarantees
without considering closed-loop dynamics
[ V. Vovk, “Algorithmic Learning in a Random World”, 2005 ]
• Time-based CP exploits the dependency of error on time — but not state
[ M. Cleaveland, I. Lee, G. Pappas, L. Lindemann, “Conformal prediction regions for time series using
linear complementarity programming”, AAAI 2024 ]
• Other works combine CP with reachability verification — but in a different
and/or handcrafted pattern
[ Y. Geng, J. Baldauf, S. Dutta, C. Huang, I. Ruchkin, “Bridging Dimensions: Confident Reachability for
High-Dimensional Controllers”, FM 2024 ]
• Our insights: (a) perception error can also be heteroskedastic in state, and
(b) the knowledge of system dynamics can reduce conservatism
7
8.
Background: Scalar ConformalPrediction
8
Given:
• Calibration dataset
• Desired confidence
Provides:
➔ Upper bound for the next sample:
Details: [ Lars Lindemann’s & Jyo Deshmukh’s tutorial
“Formal Verification and Control with Conformal Prediction” ]
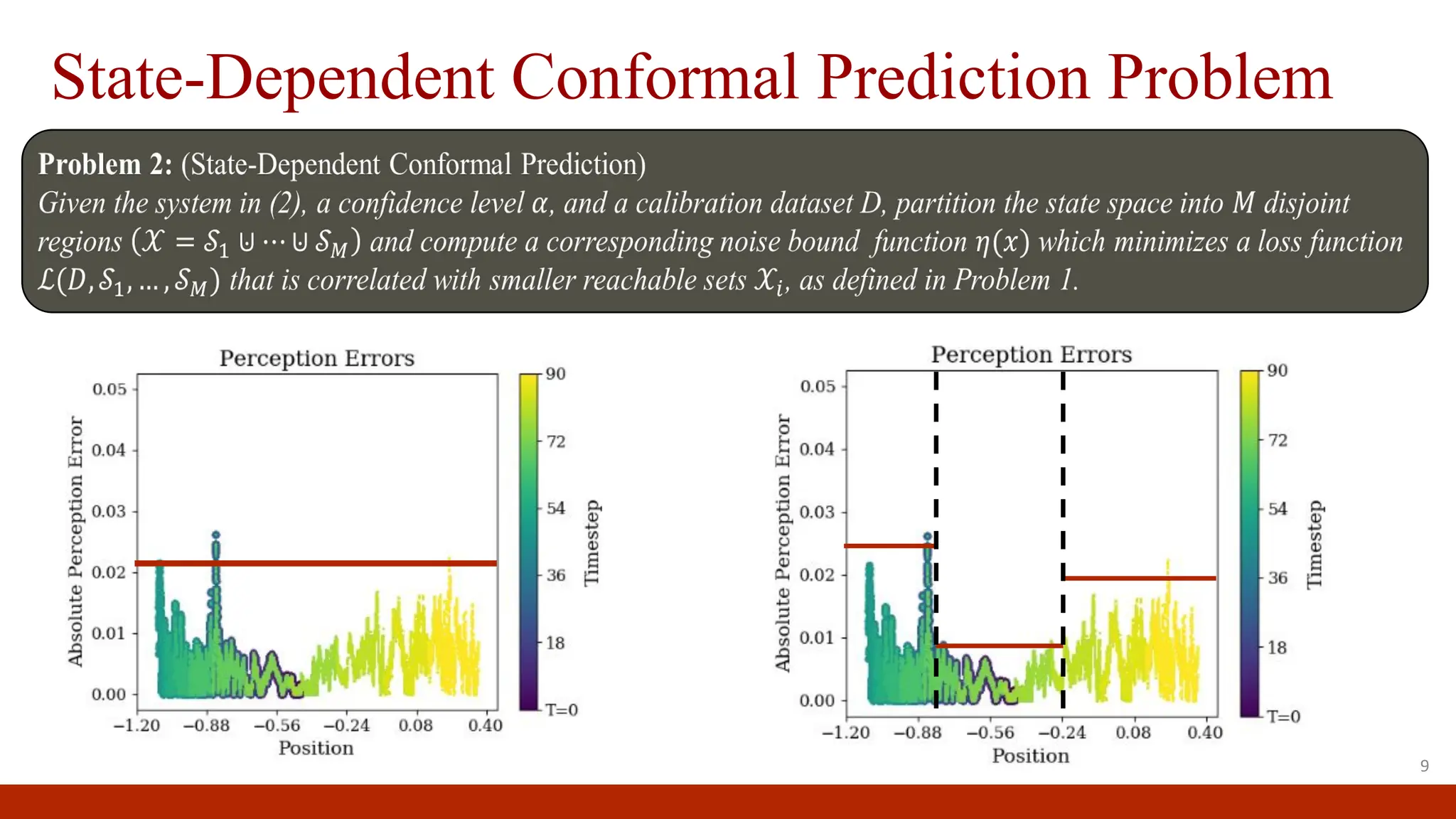
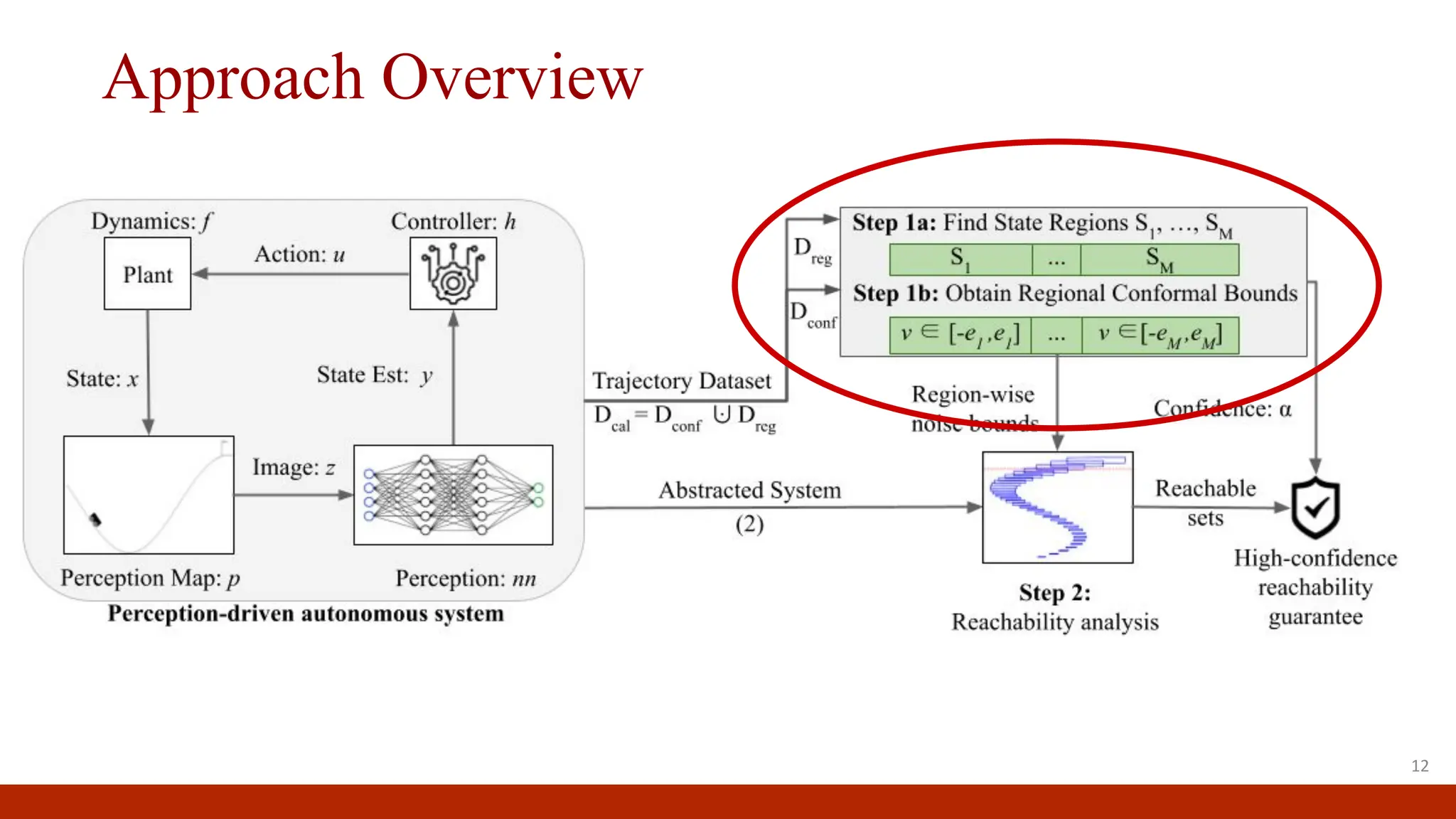
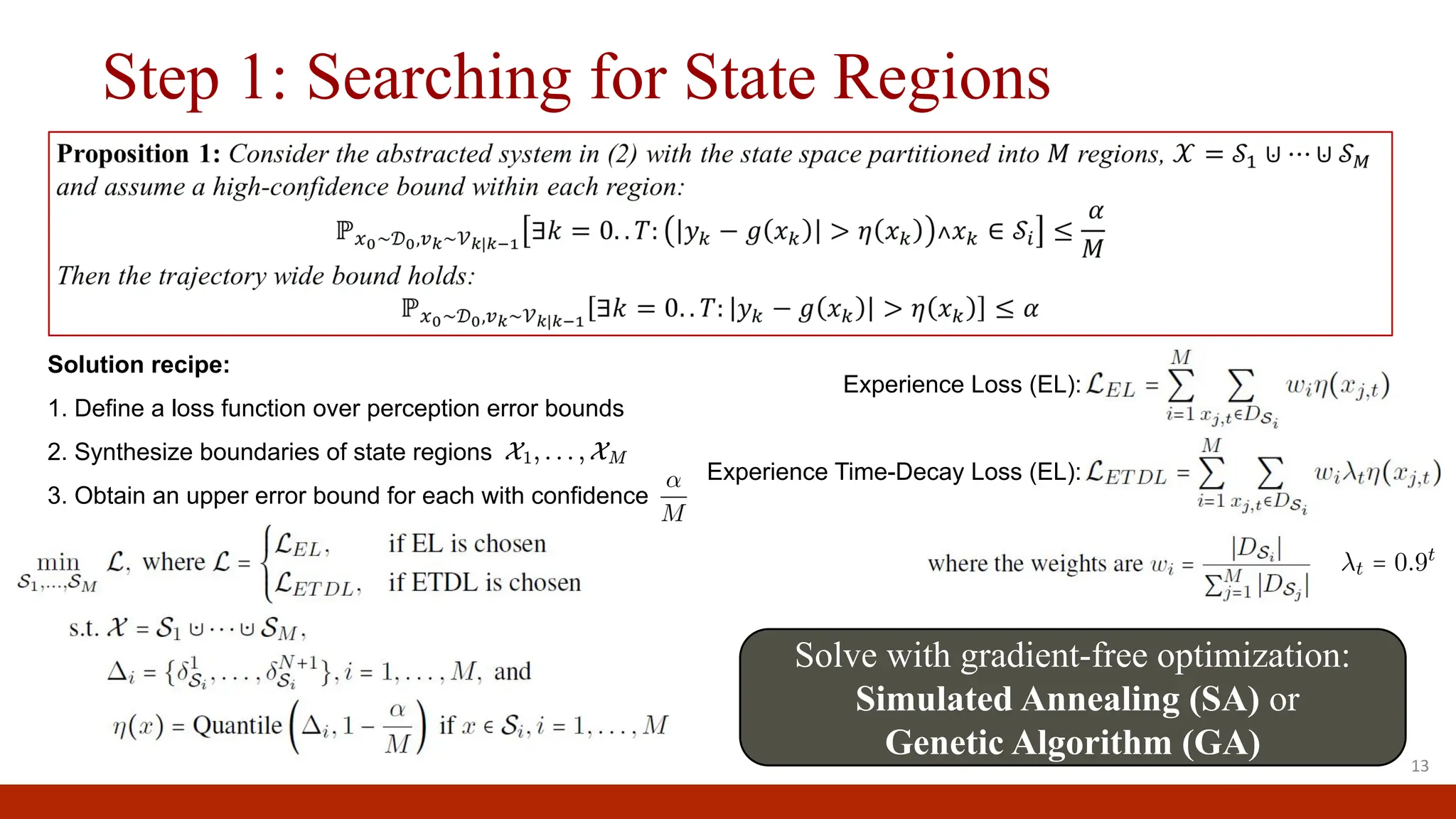
Step 1: Searchingfor State Regions
13
Solution recipe:
1. Define a loss function over perception error bounds
2. Synthesize boundaries of state regions
3. Obtain an upper error bound for each with confidence
Solve with gradient-free optimization:
Simulated Annealing (SA) or
Genetic Algorithm (GA)
Experience Loss (EL):
Experience Time-Decay Loss (EL):
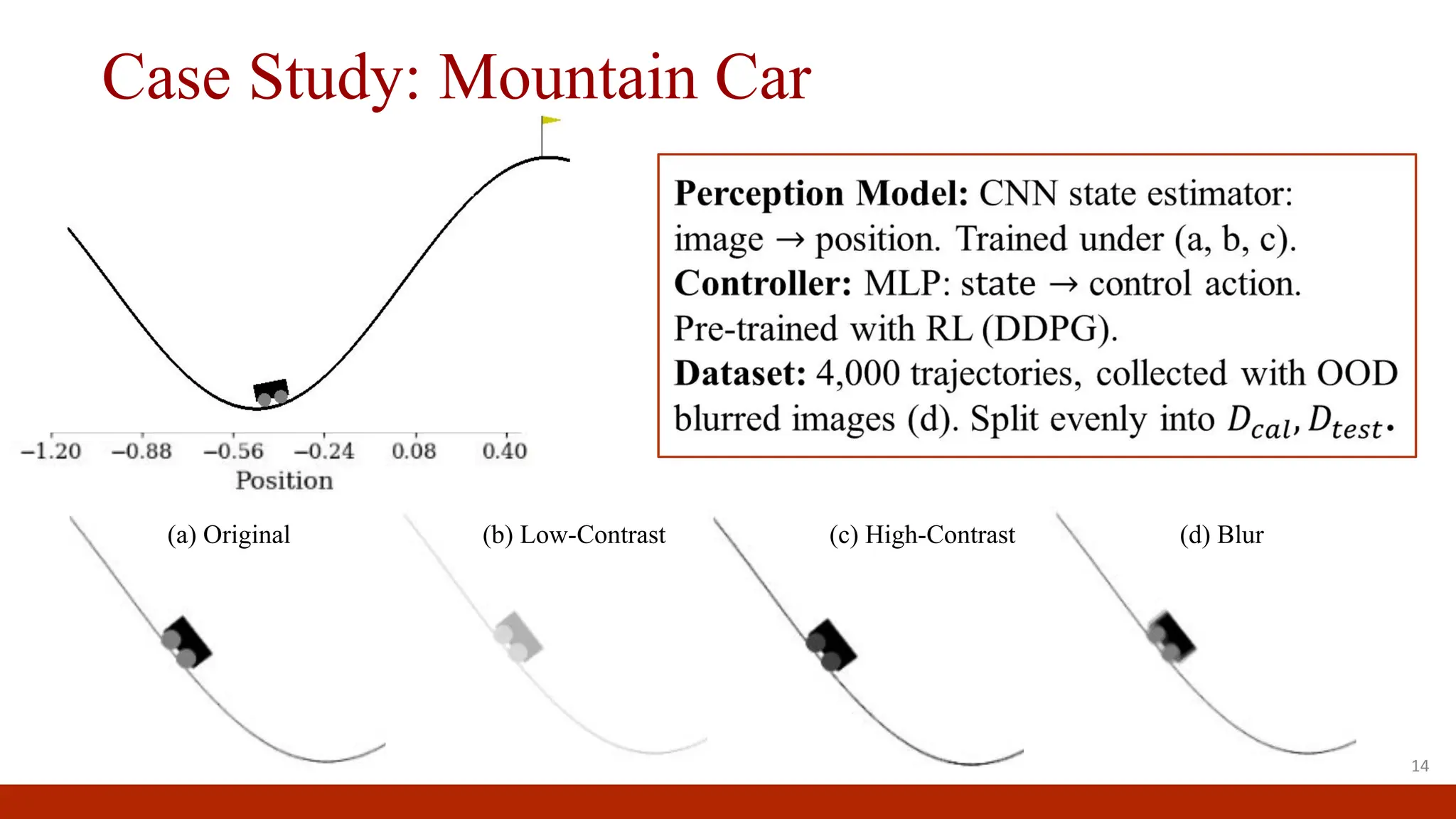
14.
14
(a) Original (b)Low-Contrast (c) High-Contrast (d) Blur
Case Study: Mountain Car
15.
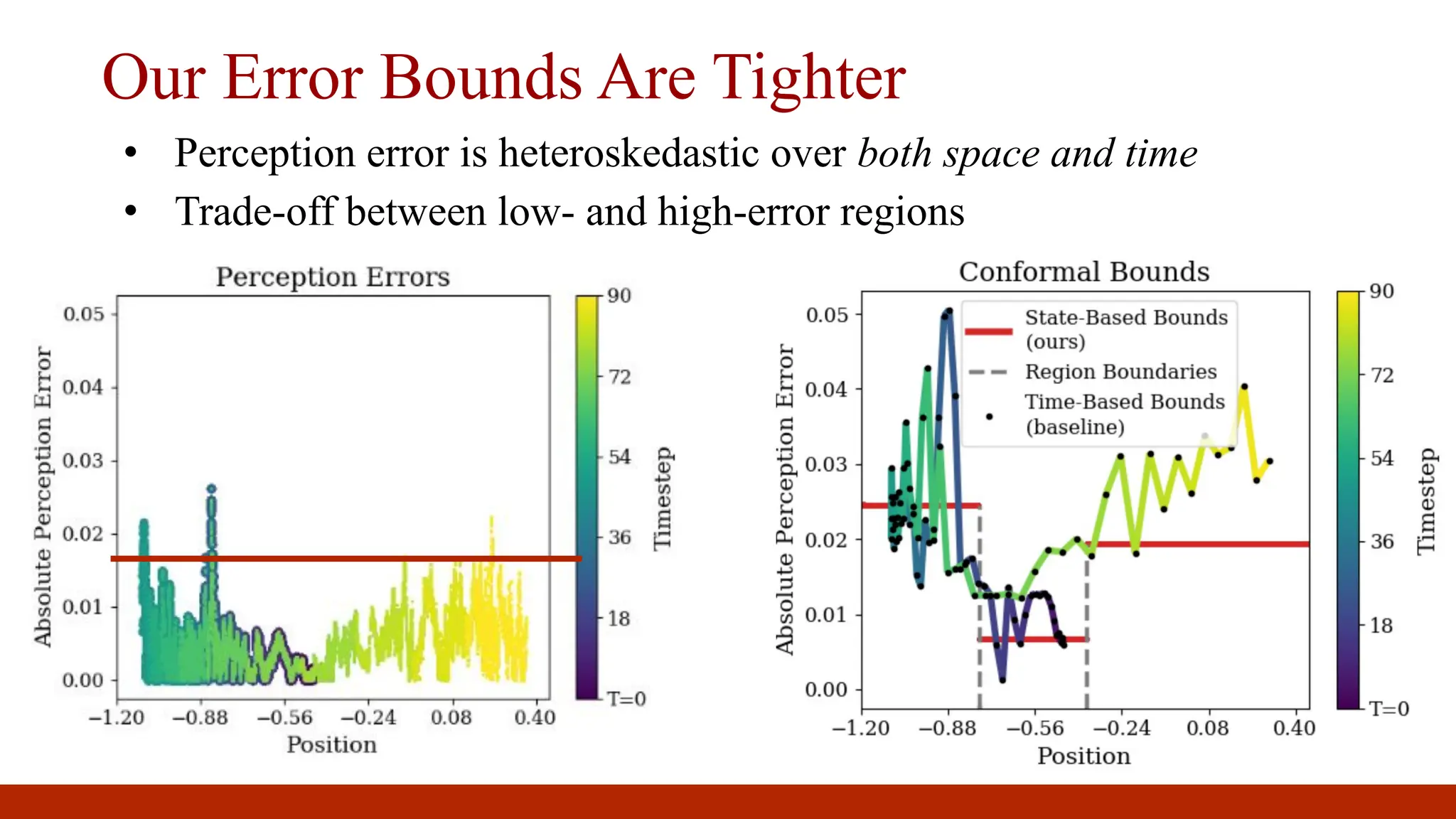
Our Error BoundsAre Tighter
15
• Perception error is heteroskedastic over both space and time
• Trade-off between low- and high-error regions
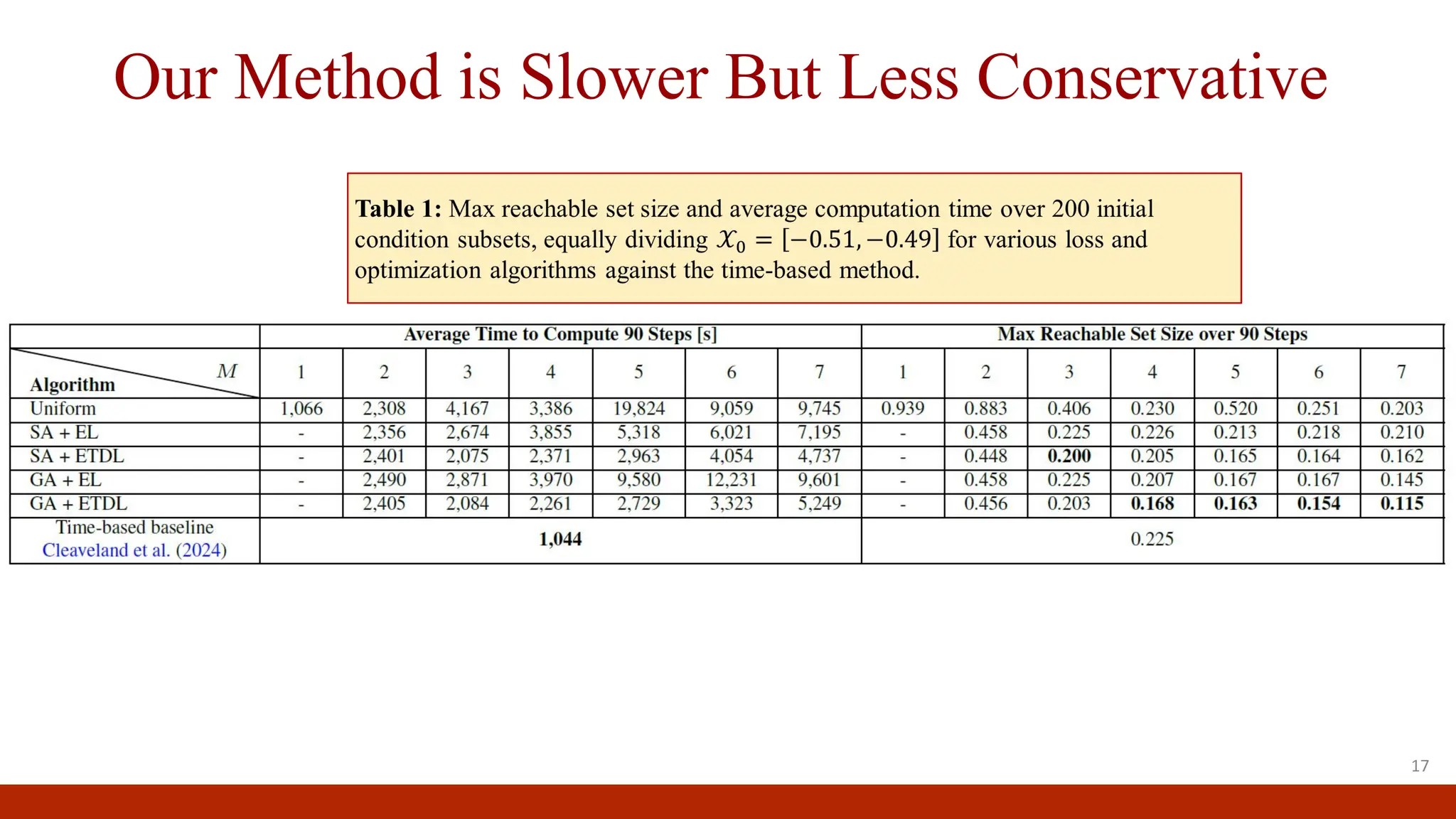
16.
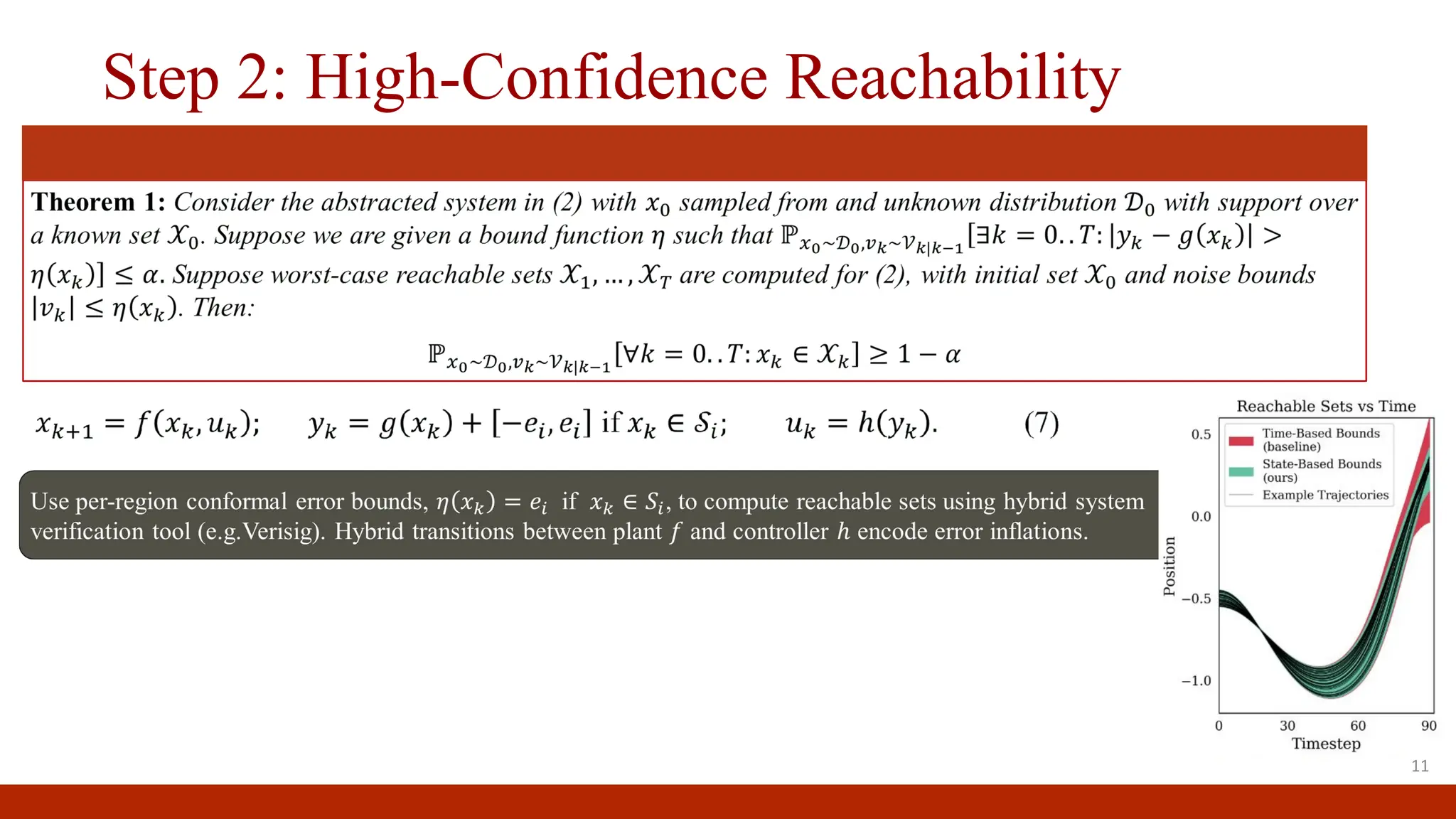
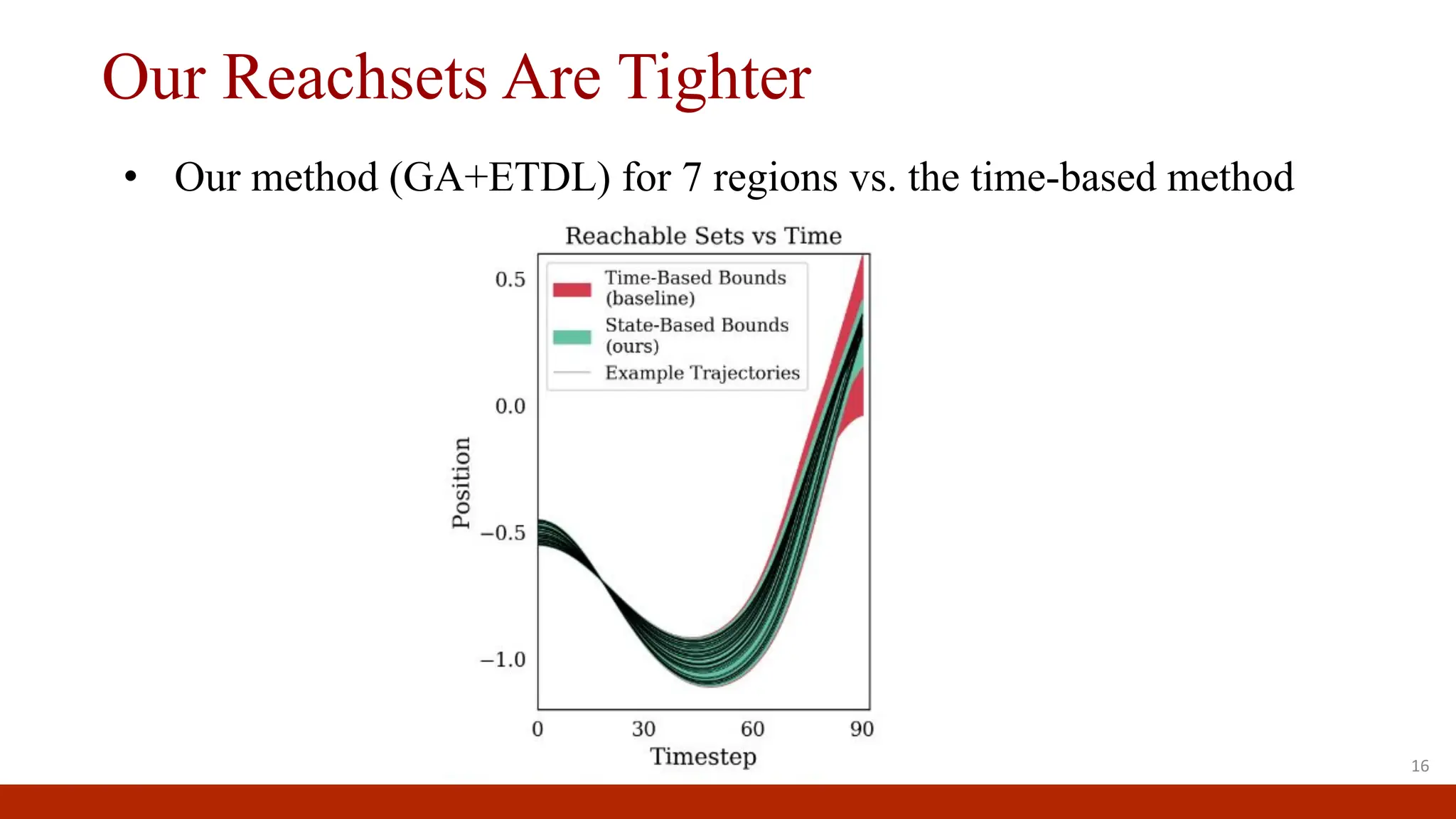
Our Reachsets AreTighter
16
• Our method (GA+ETDL) for 7 regions vs. the time-based method
Limitations
1. Inflexible confidence:same for all regions
2. Partitioning along only one state dimension
3. Unclear what partitioning is truly the best for reachability verification
18
19.
Summary
19
[ T. Waite,Y. Geng, T. Turnquist, I. Ruchkin, R. Ivanov, “State-Dependent Conformal
Perception Bounds for Neuro-Symbolic Verification of Autonomous Systems”, NeuS 2025 ]
1. Optimized conformal bounds
over state regions
2. High-confidence verification of perception-driven systems
3. Evaluation on a mountain car with visual distribution shift
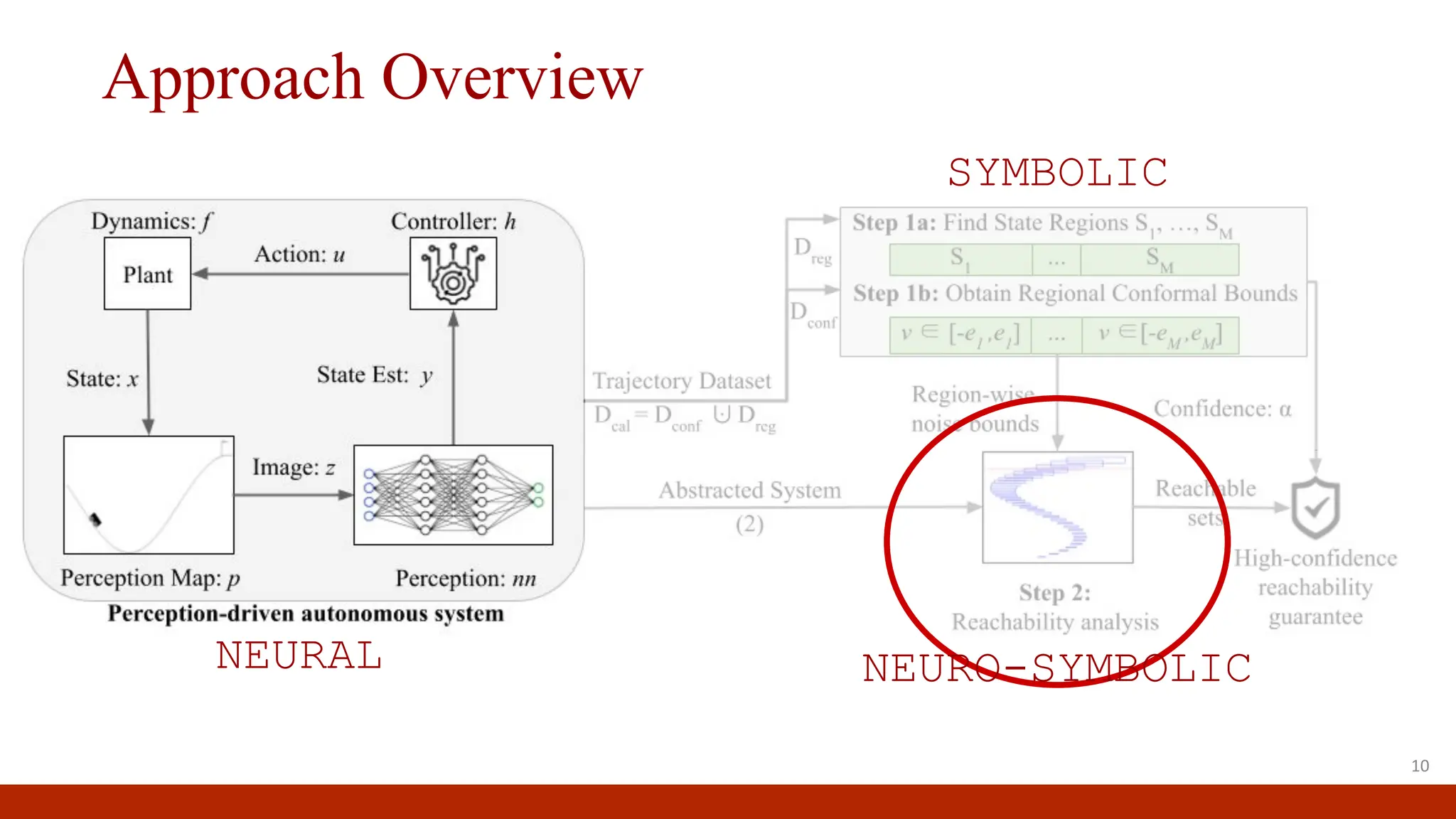
NEURAL NEURO-SYMBOLIC
SYMBOLIC

![Perception-driven Systems
Major Question:
How do we provide tight,
high-confidence safety guarantees for
perception-driven systems?
5
Original Blurred
[ T. Waite, Y. Geng, T. Turnquist, I. Ruchkin, R. Ivanov, “State-Dependent Conformal
Perception Bounds for Neuro-Symbolic Verification of Autonomous Systems”, NeuS 2025 ]](https://image.slidesharecdn.com/state-dependentconformaltacps2025-250721170513-9f7be18e/75/State-Dependent-Conformal-Perception-Bounds-for-Neuro-Symbolic-Verification-5-2048.jpg)
![Related Work
• Vanilla conformal prediction (CP) leads to overly conservative guarantees
without considering closed-loop dynamics
[ V. Vovk, “Algorithmic Learning in a Random World”, 2005 ]
• Time-based CP exploits the dependency of error on time — but not state
[ M. Cleaveland, I. Lee, G. Pappas, L. Lindemann, “Conformal prediction regions for time series using
linear complementarity programming”, AAAI 2024 ]
• Other works combine CP with reachability verification — but in a different
and/or handcrafted pattern
[ Y. Geng, J. Baldauf, S. Dutta, C. Huang, I. Ruchkin, “Bridging Dimensions: Confident Reachability for
High-Dimensional Controllers”, FM 2024 ]
• Our insights: (a) perception error can also be heteroskedastic in state, and
(b) the knowledge of system dynamics can reduce conservatism
7](https://image.slidesharecdn.com/state-dependentconformaltacps2025-250721170513-9f7be18e/75/State-Dependent-Conformal-Perception-Bounds-for-Neuro-Symbolic-Verification-7-2048.jpg)
![Background: Scalar Conformal Prediction
8
Given:
• Calibration dataset
• Desired confidence
Provides:
➔ Upper bound for the next sample:
Details: [ Lars Lindemann’s & Jyo Deshmukh’s tutorial
“Formal Verification and Control with Conformal Prediction” ]](https://image.slidesharecdn.com/state-dependentconformaltacps2025-250721170513-9f7be18e/75/State-Dependent-Conformal-Perception-Bounds-for-Neuro-Symbolic-Verification-8-2048.jpg)
![Summary
19
[ T. Waite, Y. Geng, T. Turnquist, I. Ruchkin, R. Ivanov, “State-Dependent Conformal
Perception Bounds for Neuro-Symbolic Verification of Autonomous Systems”, NeuS 2025 ]
1. Optimized conformal bounds
over state regions
2. High-confidence verification of perception-driven systems
3. Evaluation on a mountain car with visual distribution shift
NEURAL NEURO-SYMBOLIC
SYMBOLIC](https://image.slidesharecdn.com/state-dependentconformaltacps2025-250721170513-9f7be18e/75/State-Dependent-Conformal-Perception-Bounds-for-Neuro-Symbolic-Verification-19-2048.jpg)
























































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)




