Download to read offline

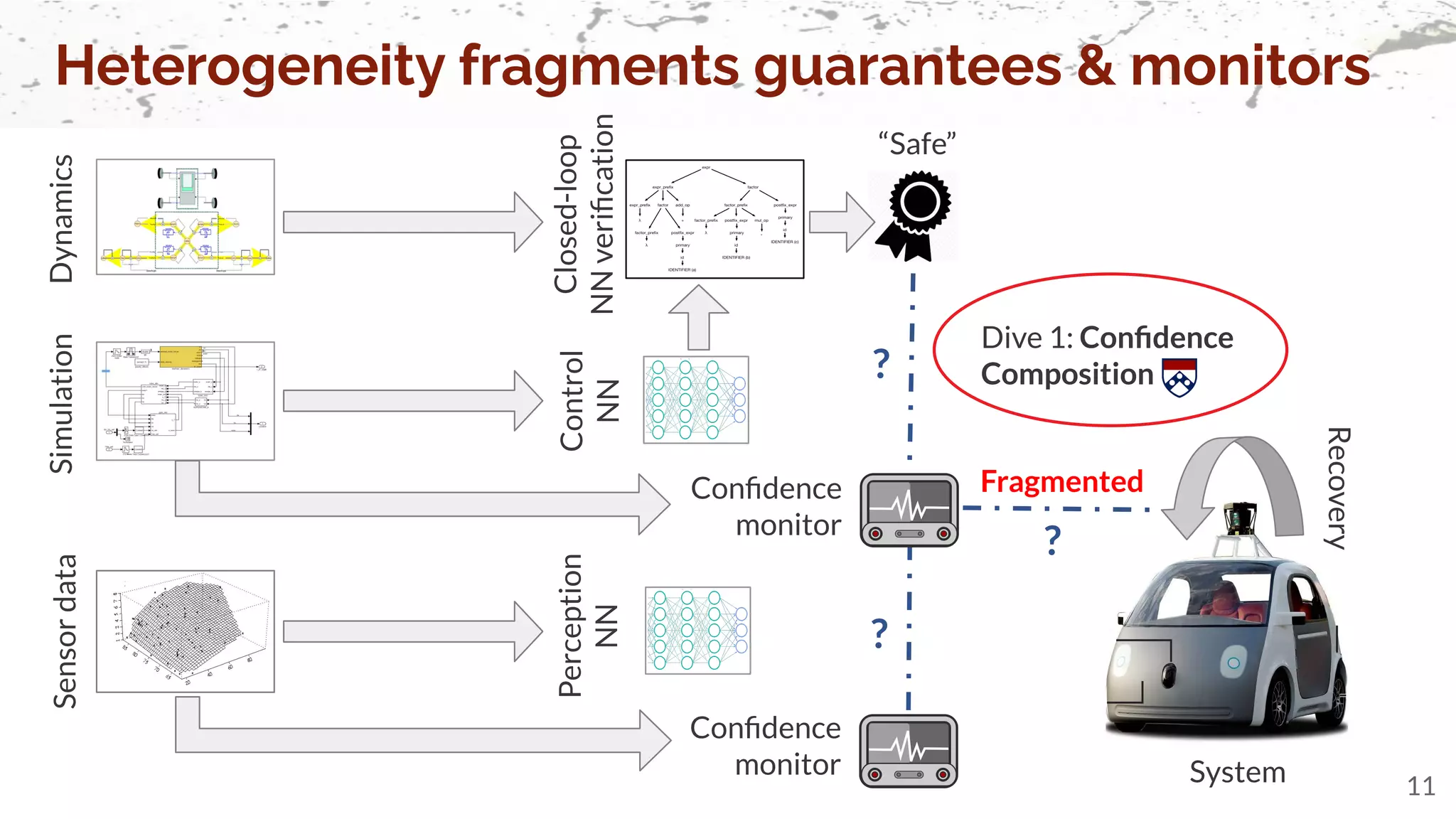
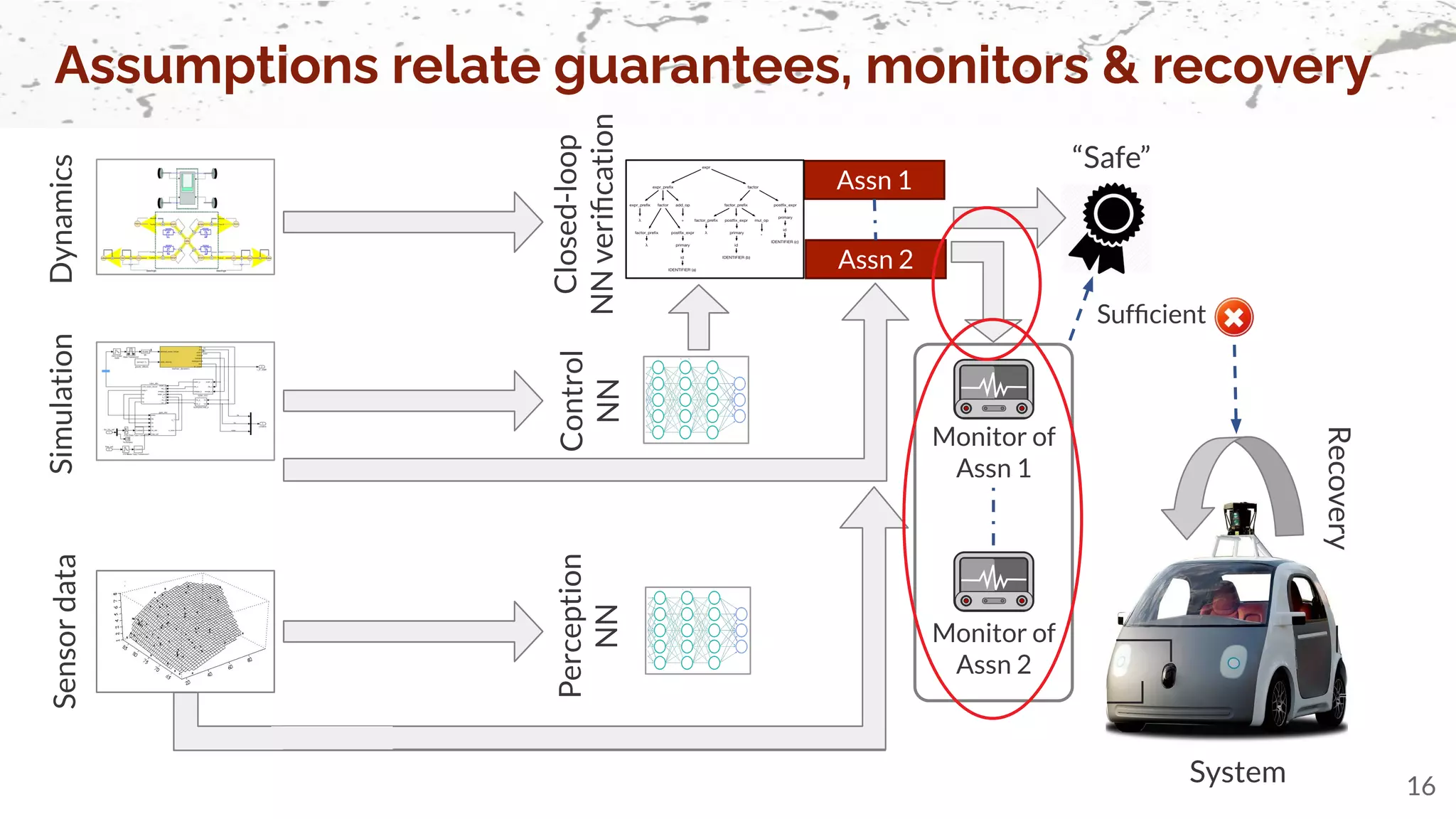
![— Correct operation of a component
○ E.g., confidence in NN outputs [Guo’17]
○ Difficult to connect to system-level safety
— Satisfaction of requirements (including safety)
○ E.g., temporal specification monitoring [Deshmukh’17]
○ Violations detected too late to recover
— Future violations of requirements
○ E.g., Simplex architecture [Sha’01]
○ Key idea: assumption monitoring, e.g., of proof premises [Mitsch’14]
What to monitor at run time?
12](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-12-2048.jpg)
![— Discrete-output monitors: “Yes”, “No”, “Maybe” via sequential detection [Scharf’91, Poor’13]
— Limitations of discrete assumption monitoring:
○ Too coarse for highly uncertain assumptions → uninformative
○ Errors accumulate combinatorially → decreased performance [EMSOFT’20]
▹ M1 ∧ M2 ∧ M3: 10% monitor FPR*
→ 27% composition FPR
How to monitor assumptions?
15
* FPR = false positive rate
— Key idea: Confidence monitoring instead of discrete monitoring [FMOS’21, ICCPS’22a]
○ Confidence C in assumption A is an estimate of Pr(A)
○ Expected calibration error (ECE) for confidence C predicting satisfaction of A:
▹ ECE(C, A) = E[| Pr( A | C ) - C |]](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-15-2048.jpg)
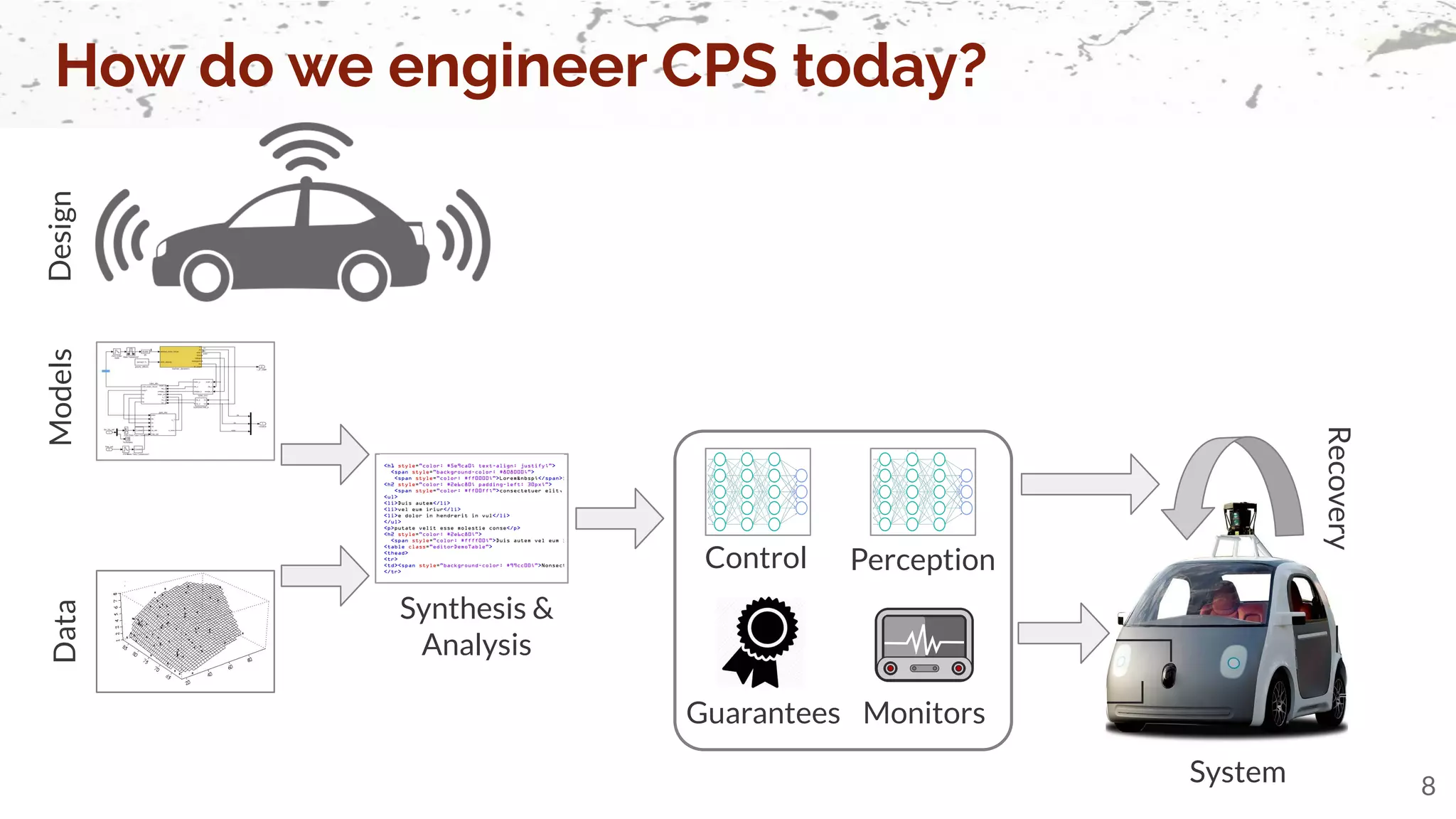
![— Build a comprehensive model
○ Probabilistic graphical models: Bayesian/Markov networks [Pearl’88, Koller’09]
○ Copulas: joint distributions for given marginals[Nelsen’06]
Our goal: combine the confidences into a predictive probability of safety
Existing work:
— Aggregate predictions of the same phenomenon
○ Forecast combination and ensemble learning[Ranjan’10, Sagi’18]
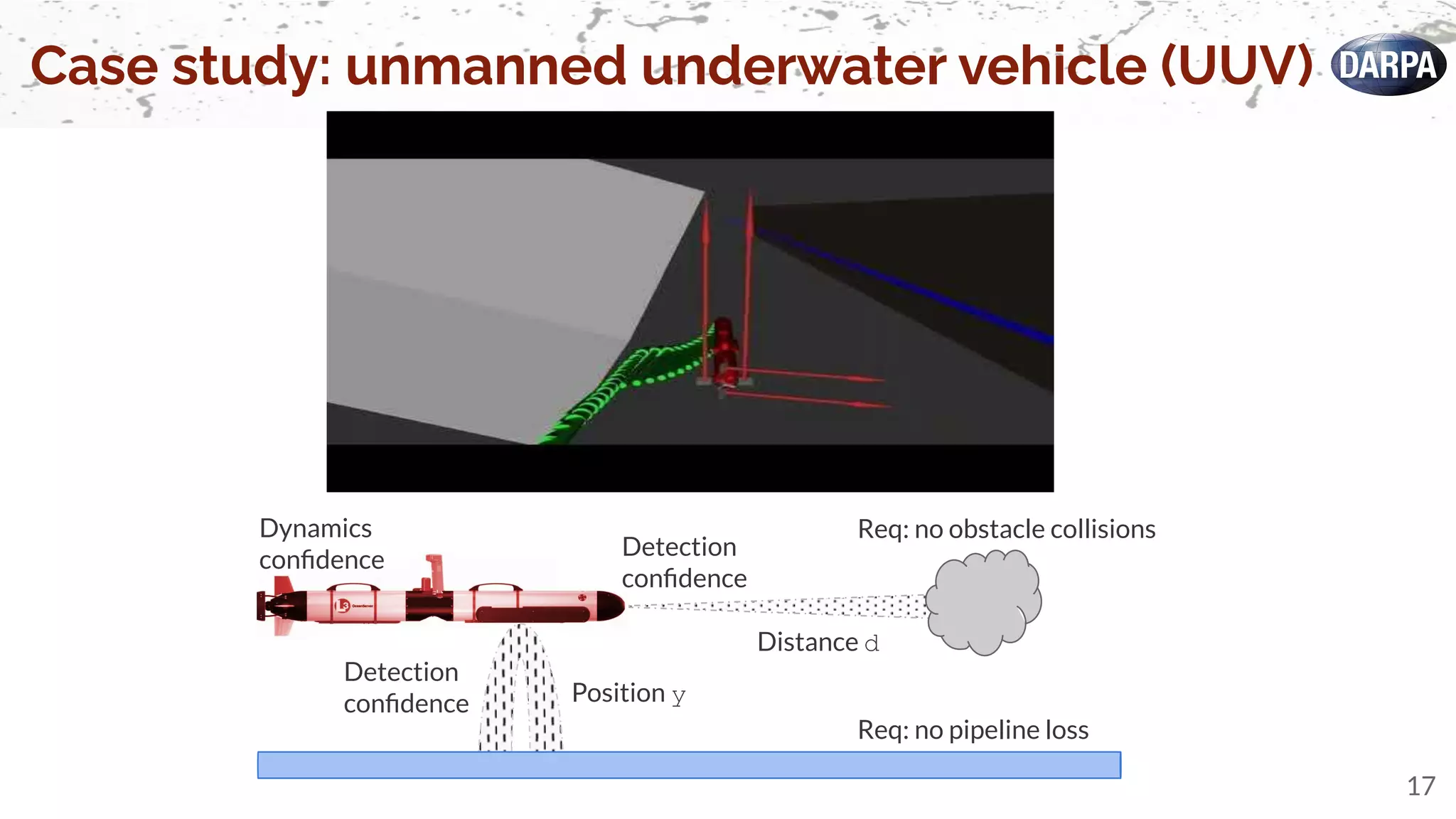
Case study: unmanned underwater vehicle (UUV)
18
Req: no obstacle collisions
Req: no pipeline loss
Detection
confidence
Distance d
Position y
Dynamics
confidence Detection
confidence
→ but we have different assumptions
→ but requires dependencies between confidences](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-18-2048.jpg)
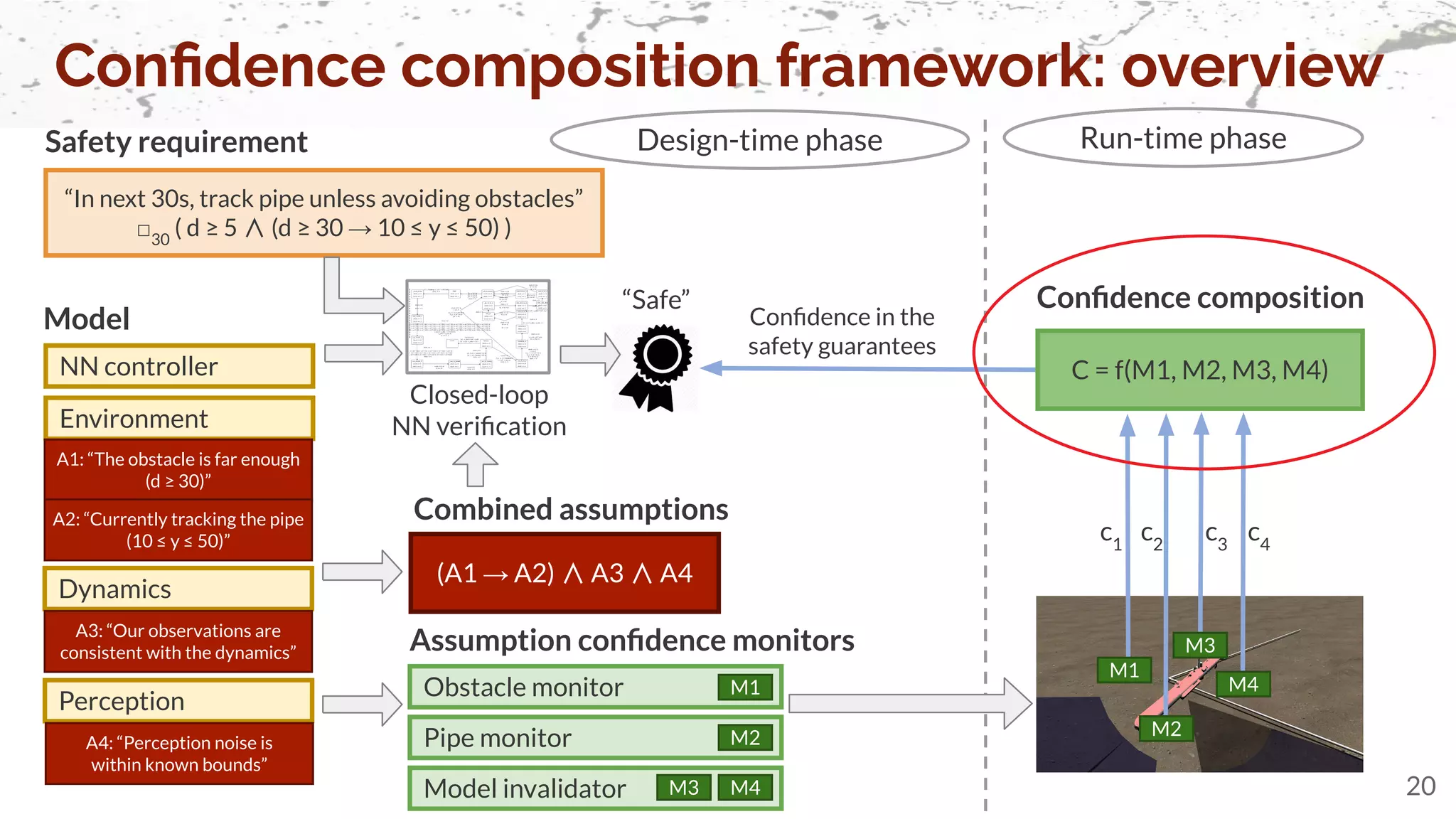
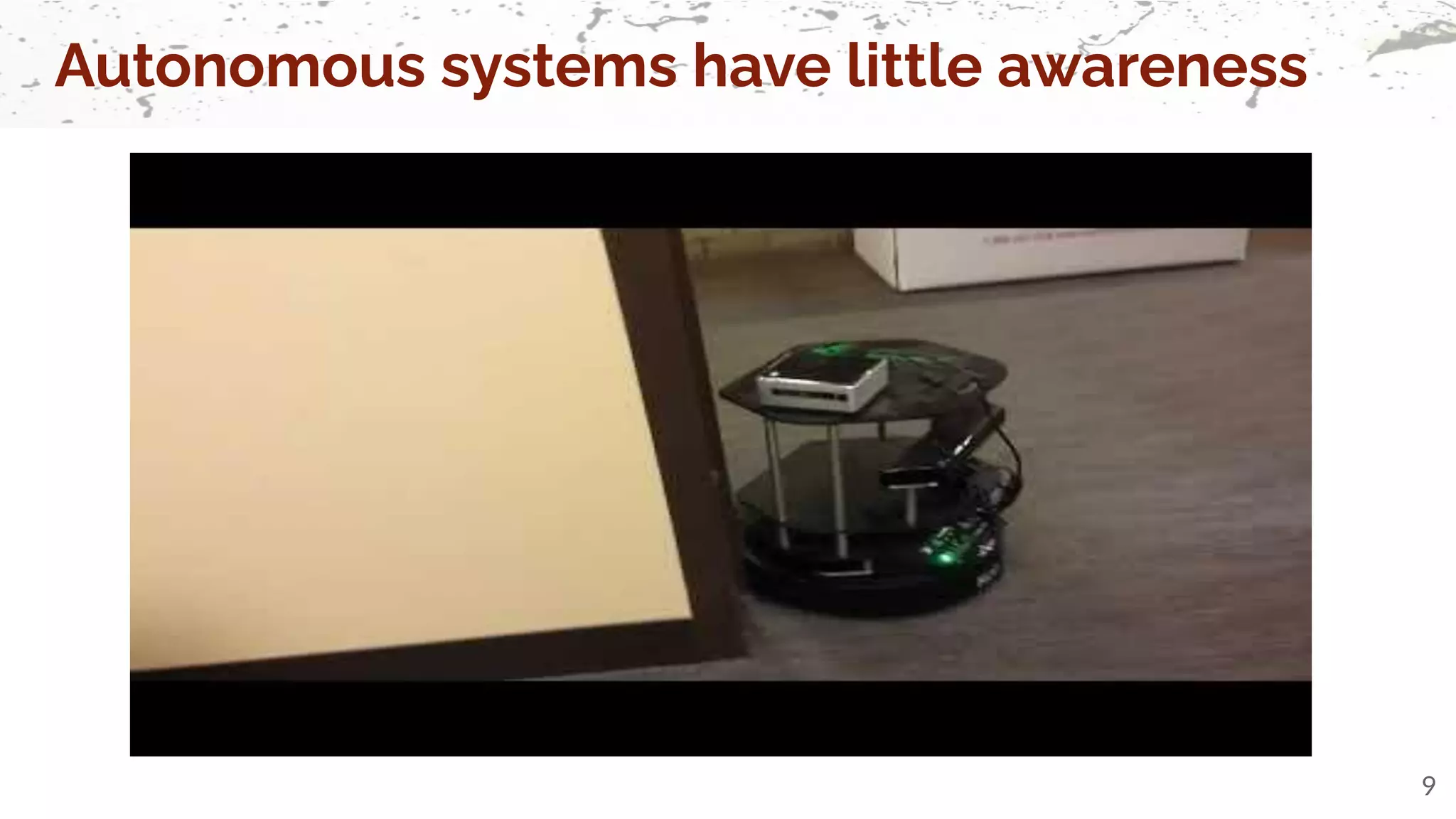
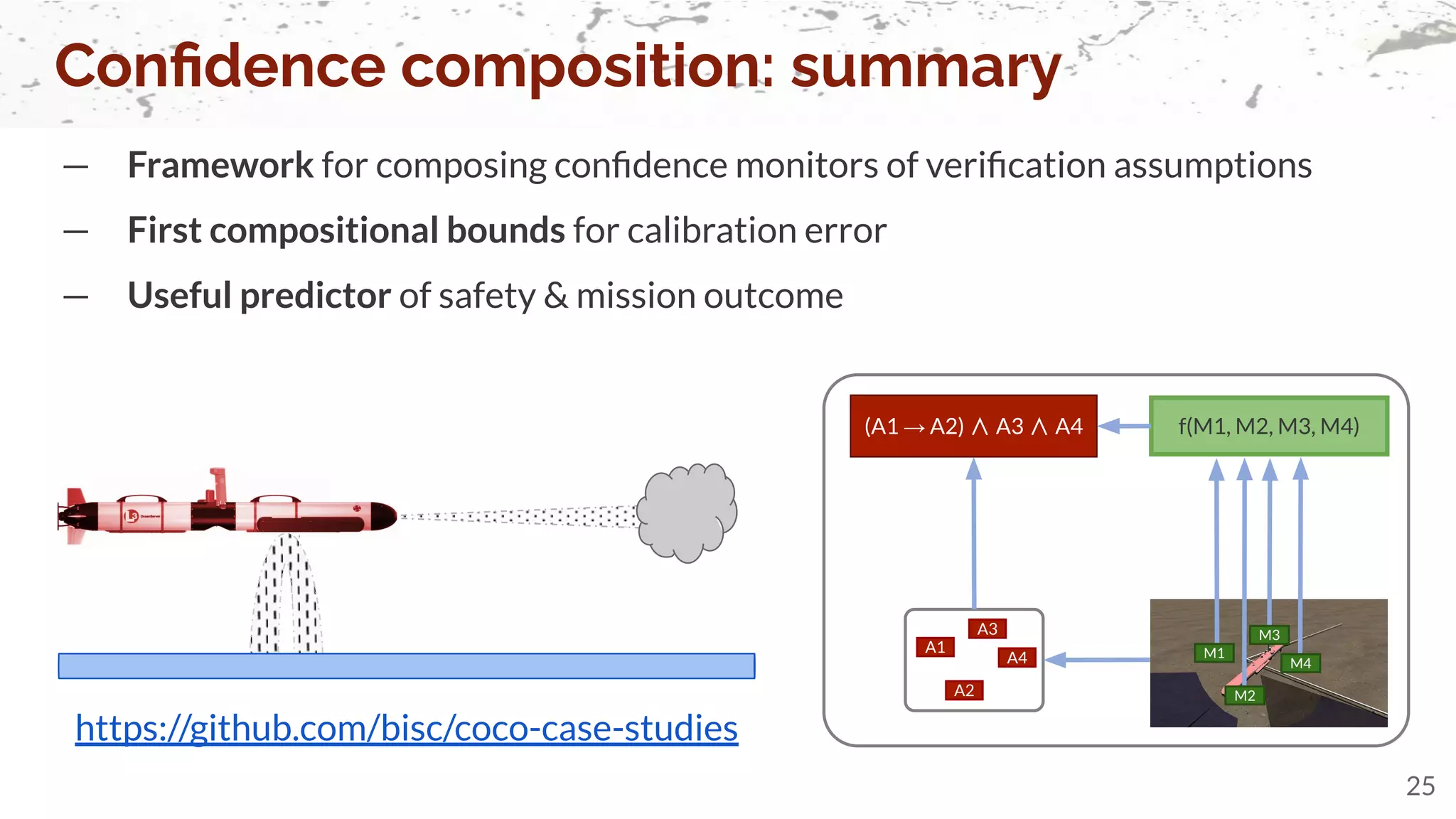
![How to compose confidences?
21
C = f(M1, M2, M3, M4)
Composed confidence
M2
M1
M3
M4
A2
A1
A3
A4
A = (A1 → A2) ∧ A3 ∧ A4
Combined assumptions
Verification
Given: calibrated monitors
ECE(M1, A1) ≤ e 1
, …
Safety outcome
S ∈ { , } Goal: calibrate C to S
ECE(C, S) ≤ e
[ICCPS’22a] Theorem: the Goal is achieved if
C is calibrated to A: ECE(C, A) ≤ g(e)
Monitors have
- Unknown dependencies
- Idiosyncratic inaccuracies
[ICCPS’22a] Ruchkin, Cleaveland, Ivanov, Lu, Carpenter, Sokolsky, Lee.
Confidence Composition for Monitors of Verification Assumptions. To appear in the Int’l Conf. on Cyber-Physical Systems (ICCPS), May 2022](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-21-2048.jpg)
![ECE(M1*M2, A1∧A2) ≤ max[4e1
e2
, (Var[M1]*Var[M2])0.5
+ e1
+ e2
+ e1
e2
]
ECE(w1
*M1+w2
*M2, A1∧A2) ≤ max[e1
+ e2
+ e1
e2
, max[w1
, w2
] + e1
+ e2
− e1
e2
]
How to compose confidences?
22
C = f(M1, M2, M3, M4)
Composed confidence
M2
M1
M3
M4
A2
A1
A3
A4
A = (A1 → A2) ∧ A3 ∧ A4
Combined assumptions
Given: calibrated monitors
ECE(M1, A1) ≤ e 1
, …
Pr( )=?
Problem: conjunctive composition of ECEs: [ICCPS’22a]
Given: ECE(M1, A1) ≤ e1
, ECE(M2, A2) ≤ e2
Find: f, ef
s.t. ECE(f(M1, M2), A1 ∧ A2) ≤ ef
Our solution:
Monitors have
- Unknown dependencies
- Idiosyncratic inaccuracies
[ICCPS’22a] Ruchkin, Cleaveland, Ivanov, Lu, Carpenter, Sokolsky, Lee.
Confidence Composition for Monitors of Verification Assumptions. To appear in the Int’l Conf. on Cyber-Physical Systems (ICCPS), May 2022
[ICCPS’22a] Theorem: the Goal is achieved if
C is calibrated to A: ECE(C, A) ≤ g(e)](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-22-2048.jpg)
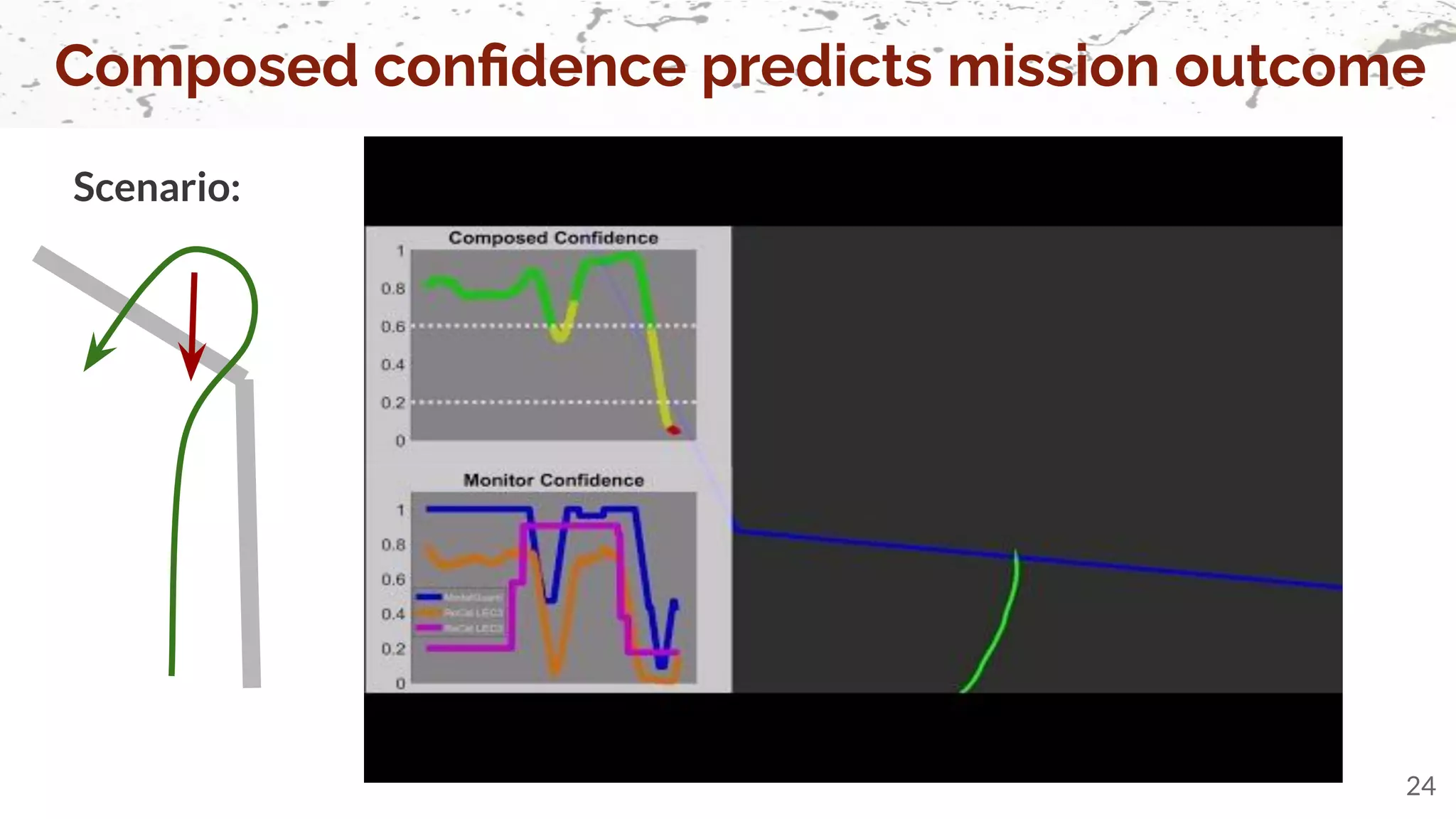
![○ Predicts mission outcome
— Case study setup: 194 simulated UUV executions
○ Random independent violations of assumptions
— Composed confidence
○ Improves calibration to safety over individual monitors
Confidence composition is useful in practice
23
[ICCPS’22a] Ruchkin, Cleaveland, Ivanov, Lu, Carpenter, Sokolsky, Lee.
Confidence Composition for Monitors of Verification Assumptions. To appear in the Int’l Conf. on Cyber-Physical Systems (ICCPS), May 2022](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-23-2048.jpg)
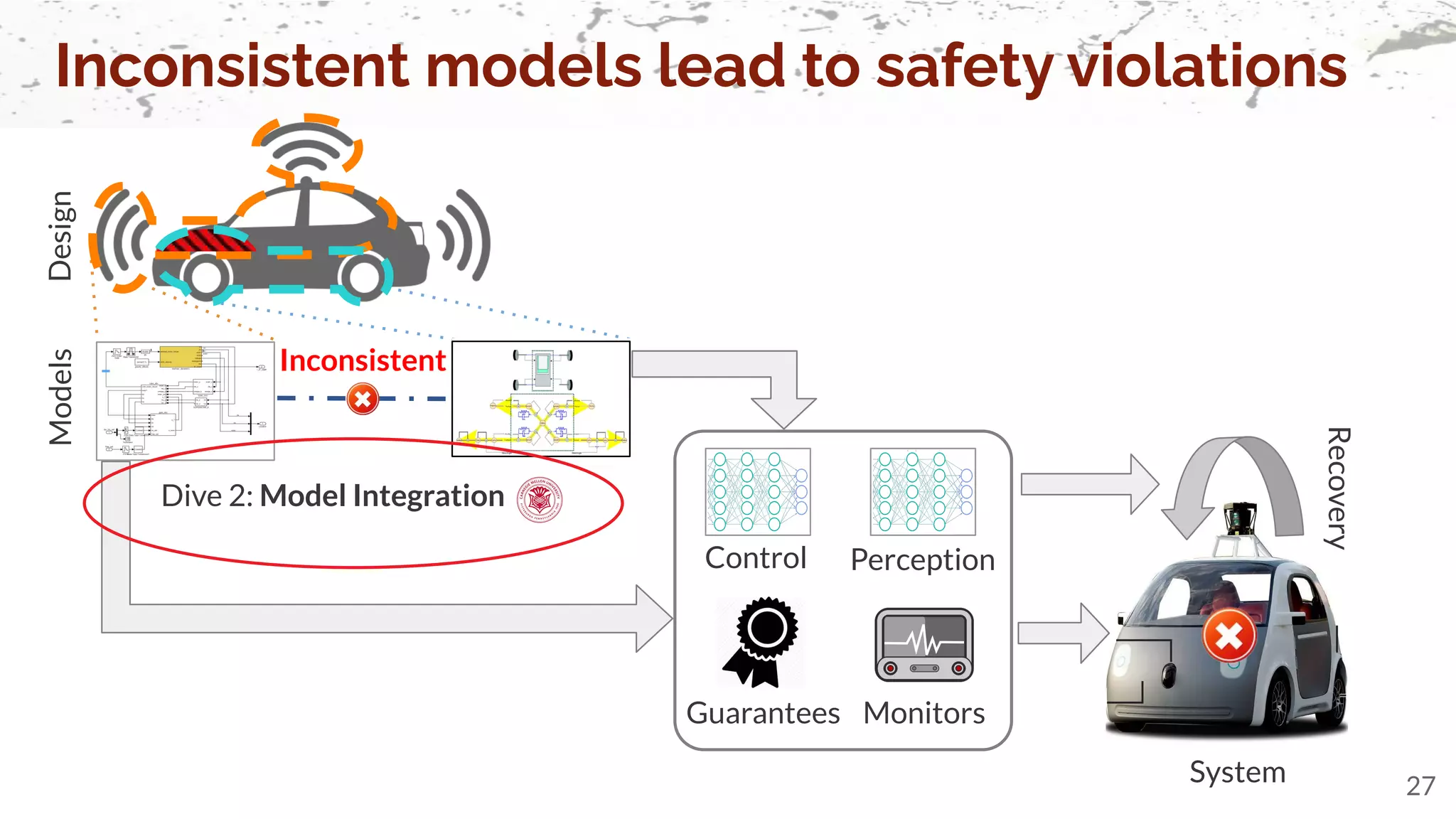
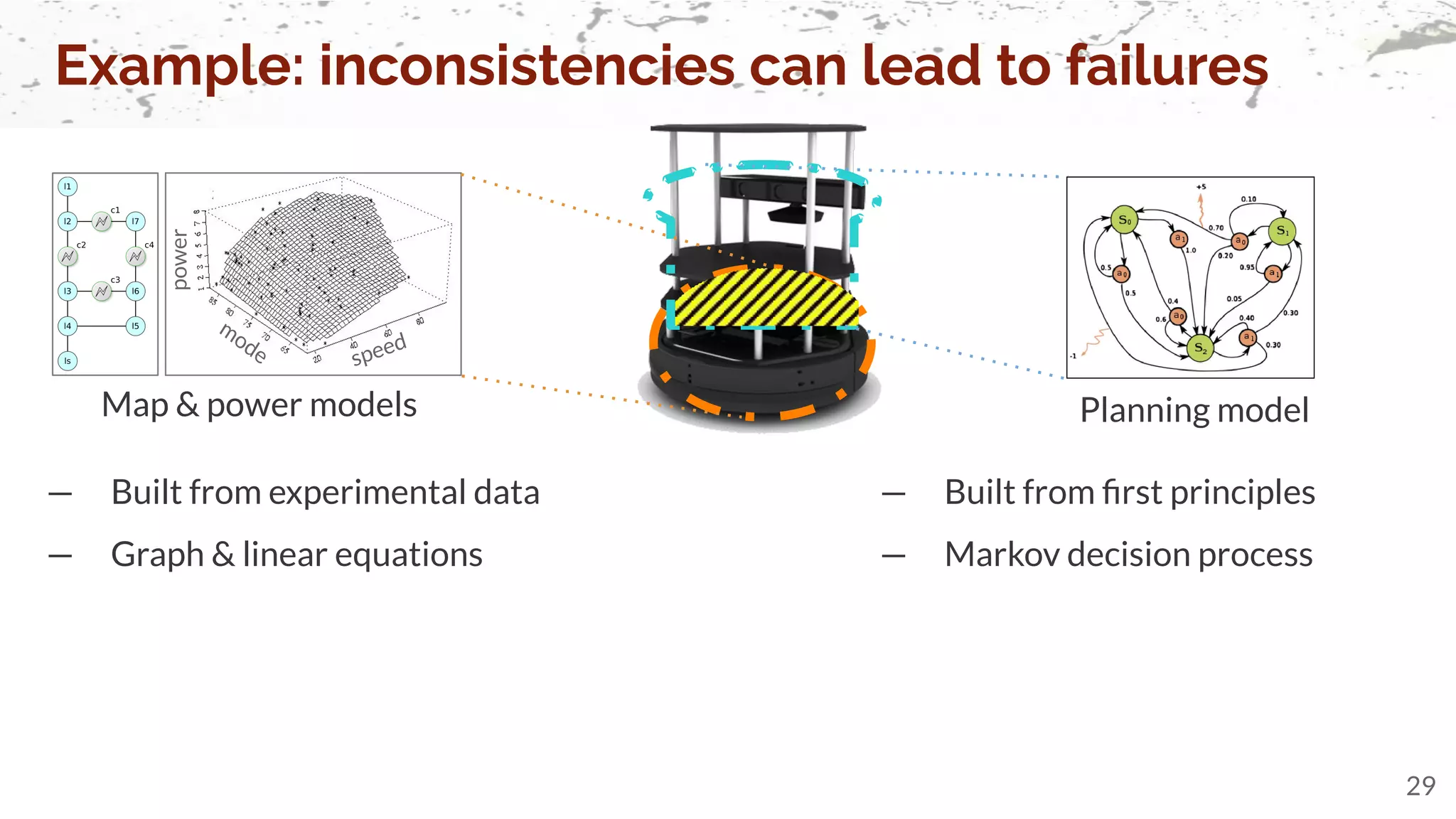
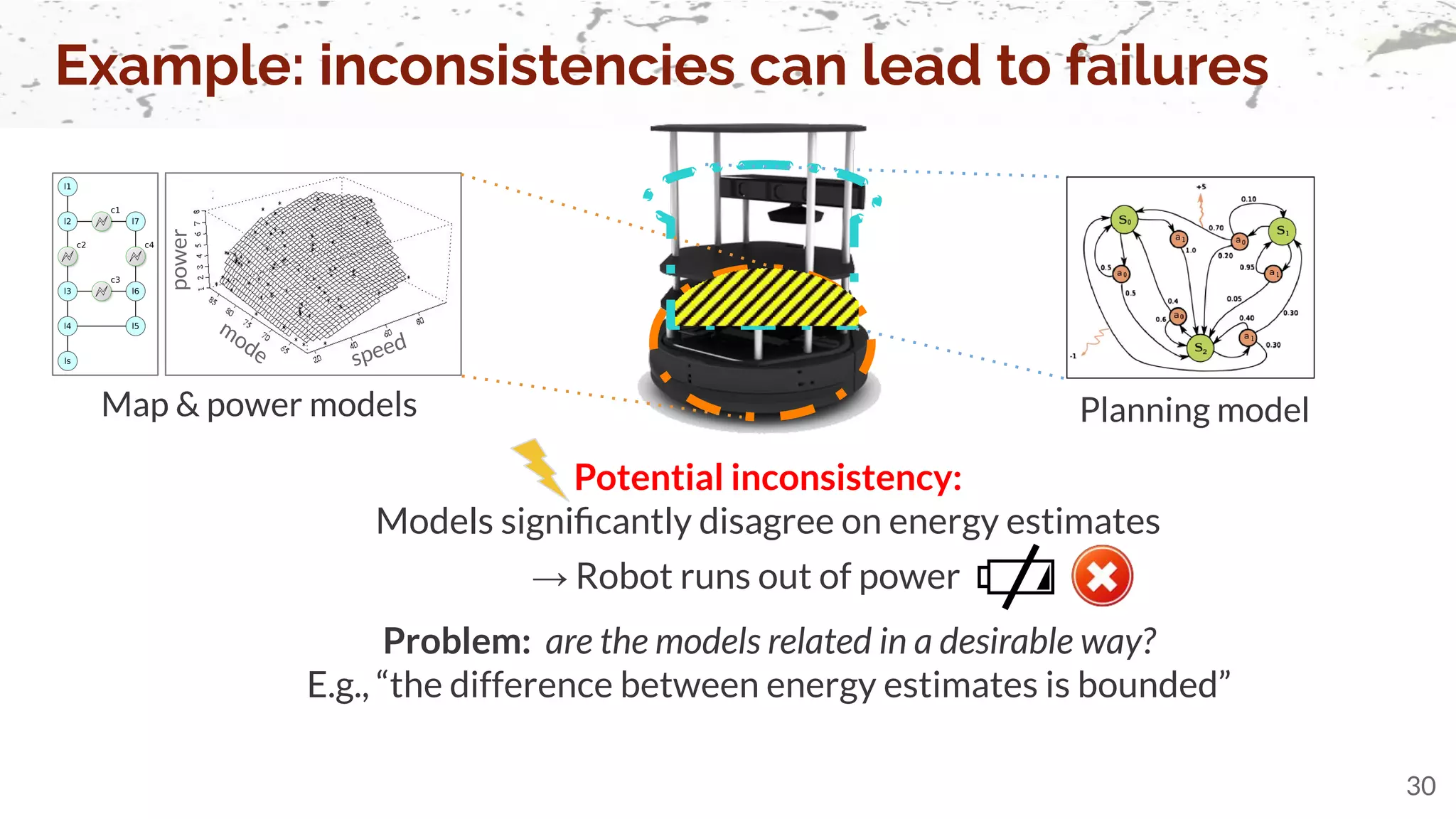
![Relating model structures and behaviors is hard
31
mode speed
power
?
Map & power models Planning model
Structural integration → inexpressive
[Sztipanovits’14, Marinescu’16]
Logic combinations → intractable
[Gabbay’96, Barbosa’16]
Behavioral integration → impractical
[Girard’11, Rajhans’13]
Hybrid simulation → no guarantees
[Lee’14, Combemale’14]
Mission plans
Tasks & their energies](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-31-2048.jpg)
![Integration properties co-constrain models
32
Integration property
mode speed
power
Map & power models Planning model
Objects, types,
attributes, relations
→ first-order logic
Sets of traces,
past/future/chance
→ modal logic
“For any valid sequence of tasks on a map, its total energy
matches the energy in the corresponding mission plan.”
Integration Property Language (IPL) [FM’18]
Mission plans
Tasks & their energies
[FM’18] Ruchkin, Sunshine, Iraci, Schmerl, Garlan. IPL: An Integration Property Language for
Multi-Model Cyber-Physical Systems. In the Int’l Symp. on Formal Methods (FM), 2018](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-32-2048.jpg)
![Integration property
33
mode speed
power
Map & power models Planning model
“For any valid sequence of tasks on a map, its total energy
matches the energy in the corresponding mission plan.”
SMT Solver* Model checker
Integration properties can be verified
Mission plans
Tasks & their energies
Soundness theorem:
Verification returns an answer → it is correct
Termination theorem:
Verification always terminates on finite structures
Implementation:
https://github.com/bisc/IPL
*SMT = Satisfiability Modulo Theories
Verification
algorithm
[FM’18] Ruchkin, Sunshine, Iraci, Schmerl, Garlan. IPL: An Integration Property Language for
Multi-Model Cyber-Physical Systems. In the Int’l Symp. on Formal Methods (FM), 2018](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-33-2048.jpg)
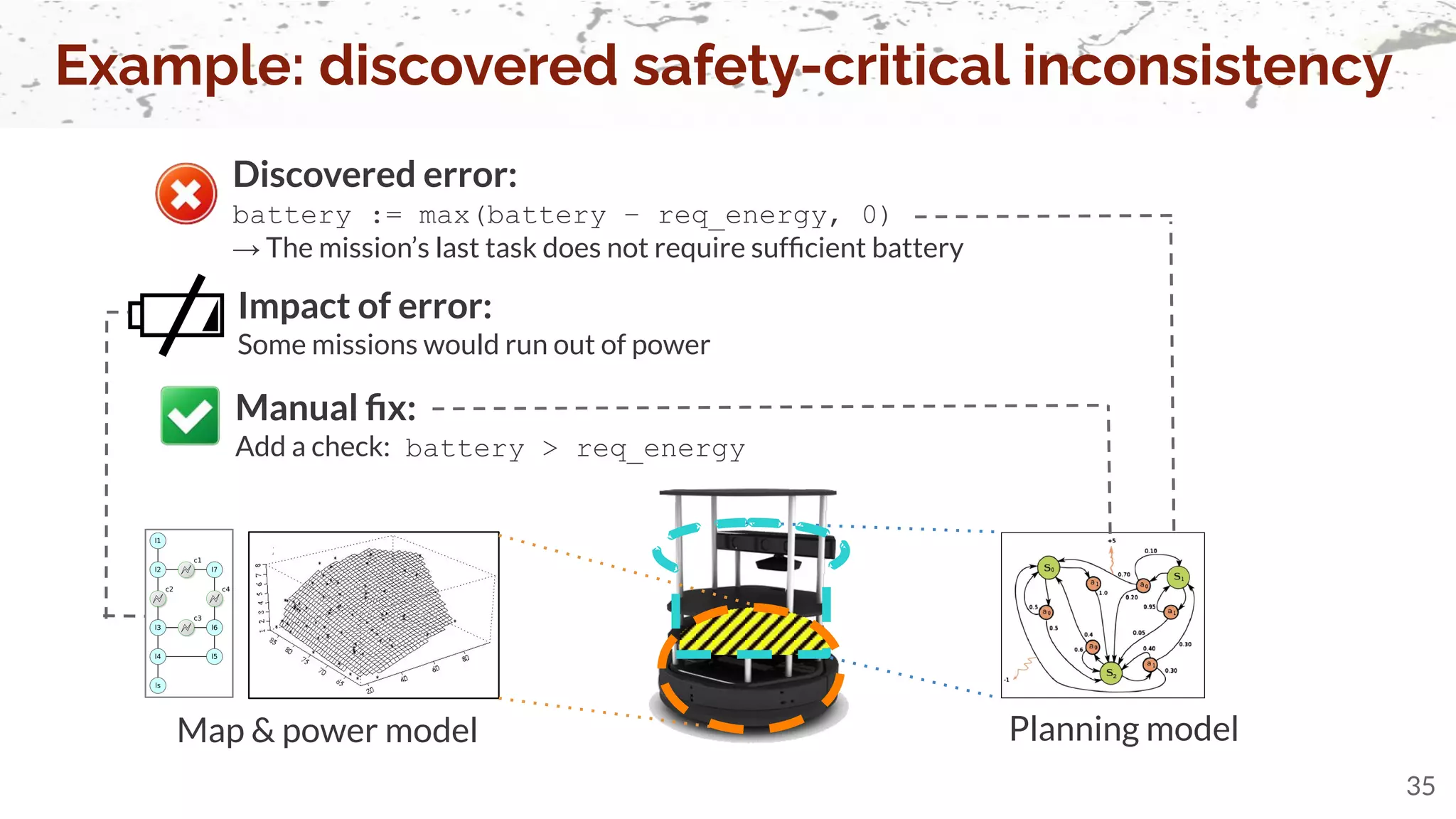
![Model integration is useful in practice
34
— Applied to the history of the robot’s models
— Practical utility:
○ Specified & verified 120+ power consistency properties
○ Verification time from seconds to dozens of hours
○ Discovered 17 real-world inconsistencies
[FM’18] Ruchkin, Sunshine, Iraci, Schmerl, Garlan. IPL: An Integration Property Language for
Multi-Model Cyber-Physical Systems. In the Int’l Symp. on Formal Methods (FM), 2018](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-34-2048.jpg)
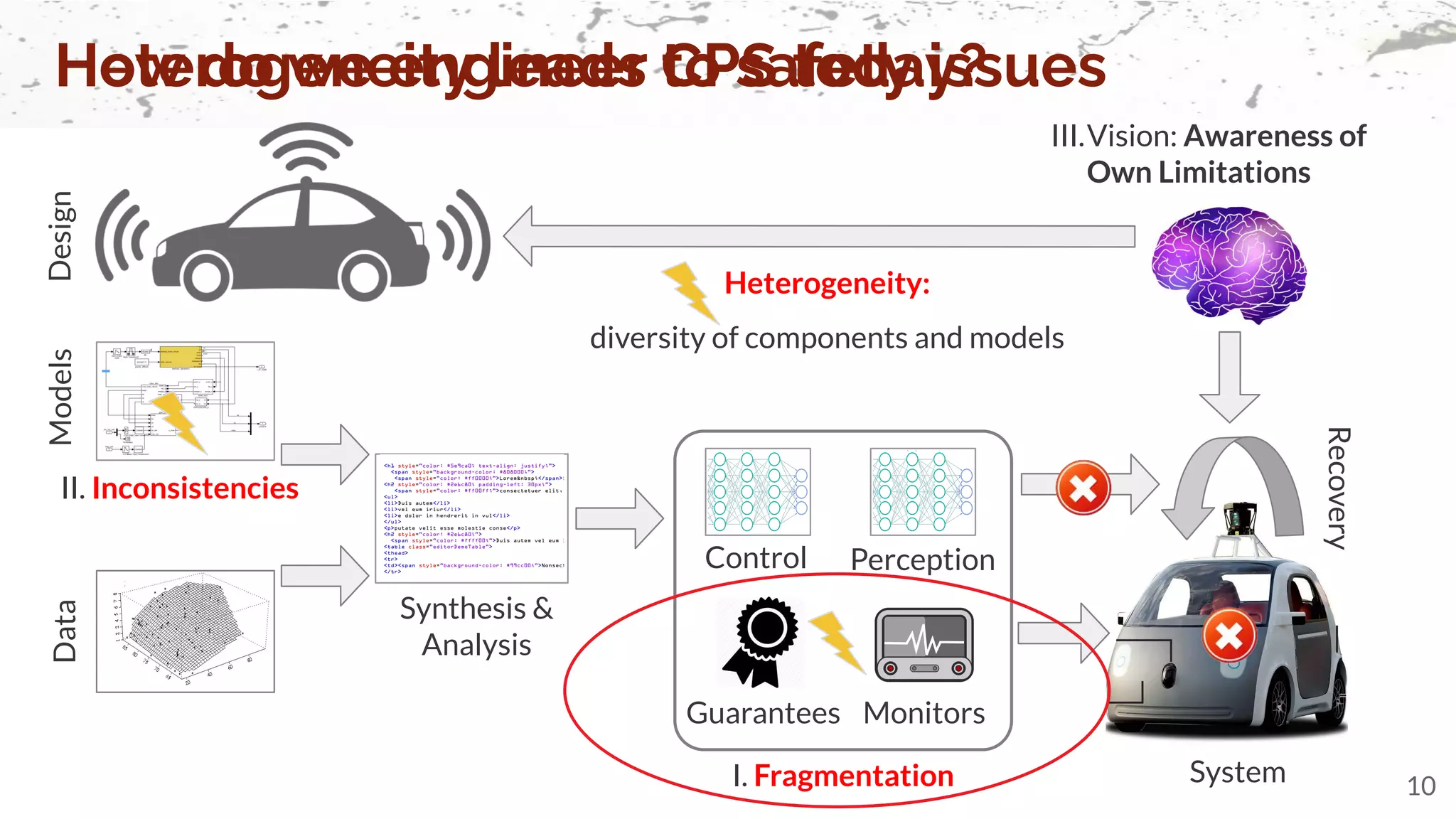
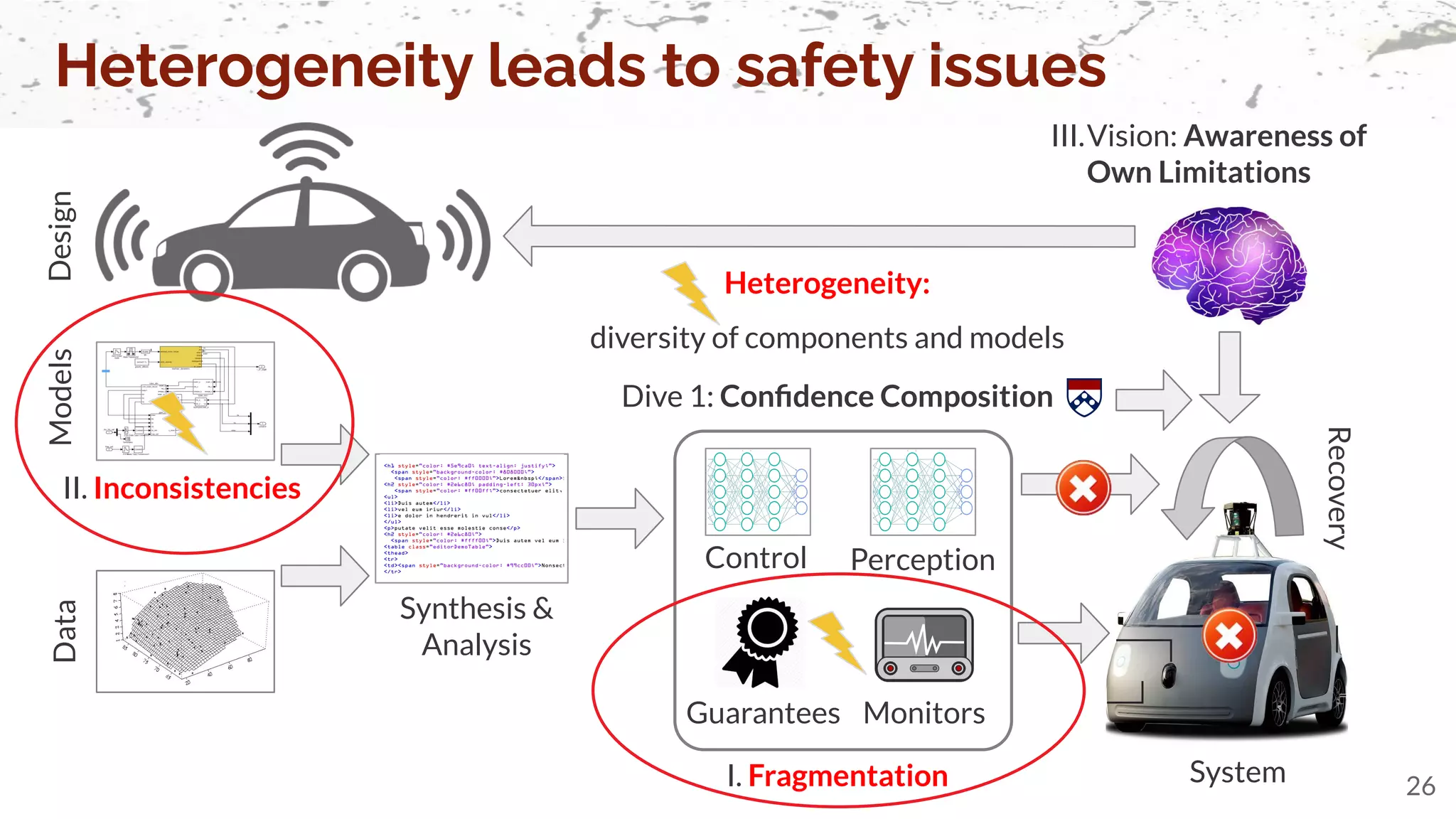
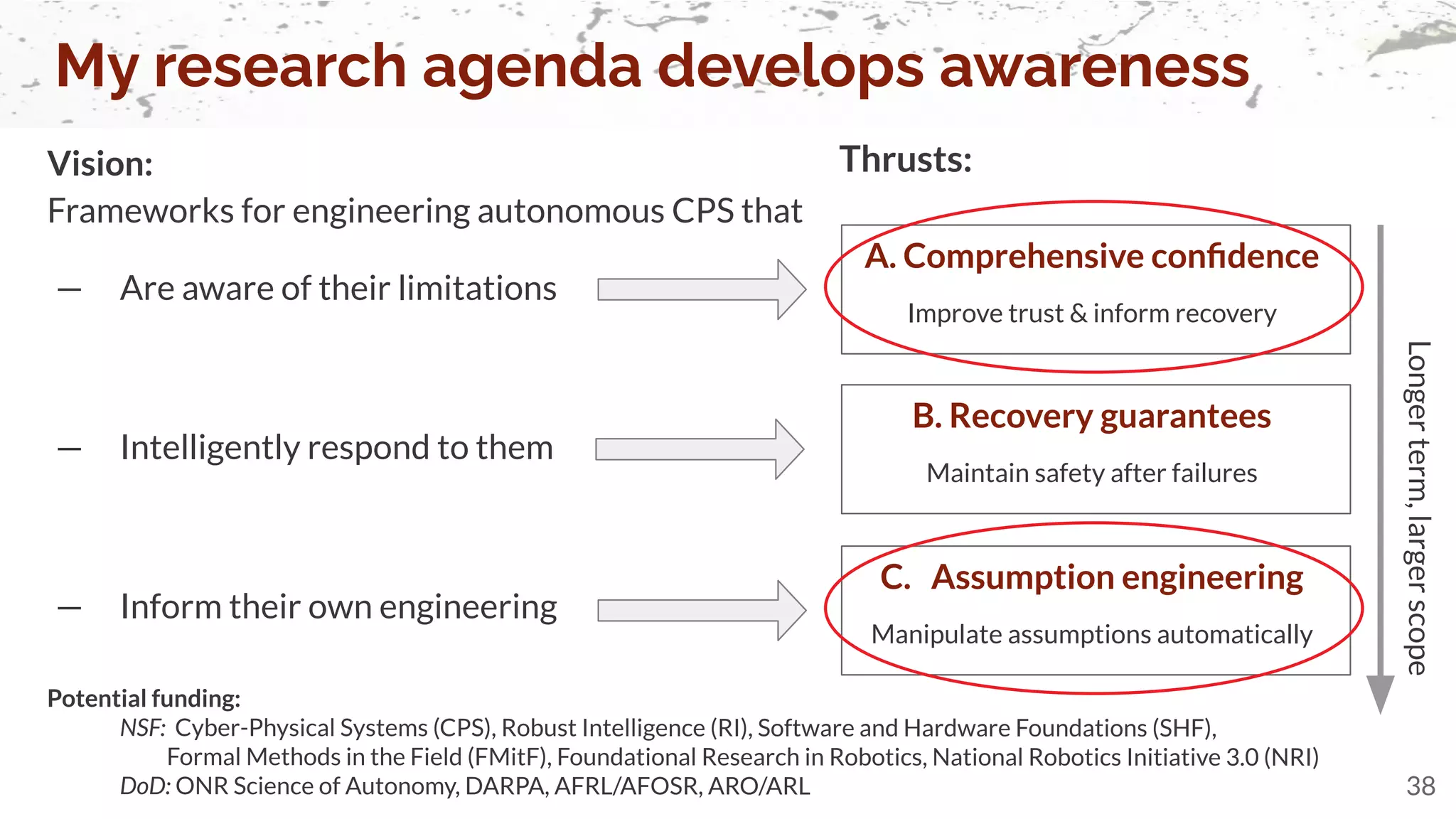
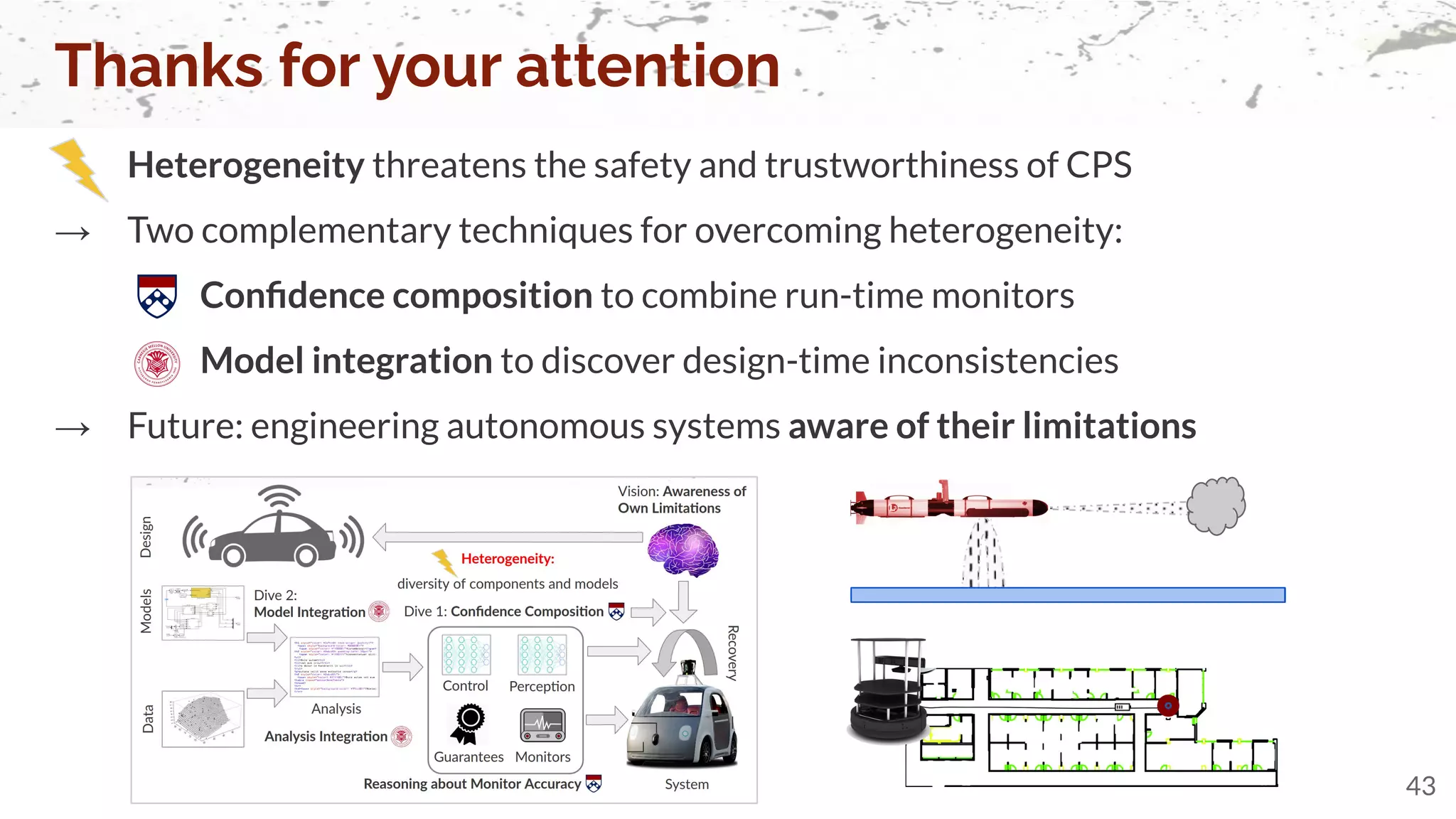
![Vision: Awareness of
Own Limitations
Data
Models
Heterogeneity leads to safety issues
37
Design
System
Control Perception
Monitors
Guarantees
Recovery
II. Inconsistencies
Dive 1: Confidence Composition
Dive 2:
Model Integration
Reasoning about Monitor Accuracy
Analysis Integration
Synthesis &
Analysis
III.
[EMSOFT’14, AVICPS’14, CPS-SPC’15, ACES-MB’15]
[EMSOFT’20, CHASE’21, ICCPS’22b, Submitted’22]
Heterogeneity:
diversity of components and models](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-37-2048.jpg)


![— [ICCPS’22a] Ruchkin, Cleaveland, Ivanov, Lu, Carpenter, Sokolsky, Lee. Confidence Composition for
Monitors of Verification Assumptions. In Proceedings of the International Conference on
Cyber-Physical Systems (ICCPS), 2022.
— [FMOS’21] Ruchkin, Cleaveland, Sokolsky, Lee. Confidence Monitoring and Composition for Dynamic
Assurance of Learning-Enabled Autonomous Systems. In Formal Methods in Outer Space (FMOS):
Essays Dedicated to Klaus Havelund on the Occasion of His 65th Birthday, 2021.
— [EMSOFT’20] Ruchkin, Sokolsky, Weimer, Hedaoo, Lee. Compositional Probabilistic Analysis of
Temporal Properties Over Stochastic Detectors. In Proceedings of the International Conference on
Embedded Software (EMSOFT), 2020.
— [FM’18] Ruchkin, Sunshine, Iraci, Schmerl, Garlan. IPL: An Integration Property Language for
Multi-Model Cyber-Physical Systems. In Proceedings of the International Symposium on Formal
Methods (FM), 2018.
References: my work in the talk
44](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-44-2048.jpg)
![— [Pearl’88] Pearl. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference.
Morgan Kaufmann, 1988.
— [Scharf’91] Scharf. Statistical Signal Processing. Pearson, 1991.
— [Gabbay’96] Gabbay. Fibred Semantics and the Weaving of Logics Part 1: Modal and Intuitionistic
Logics. In the Journal of Symbolic Logic, 1996.
— [Sha’01] Sha. Using simplicity to control complexity. In IEEE Software, 2001.
— [Nelsen’06] Nelsen. An Introduction to Copulas. Springer-Verlag, 2006.
— [Koller’09] Koller, Friedman, Bach. Probabilistic Graphical Models: Principles and Techniques. MIT
Press, 2009.
— [Ranjan’10] Ranjan, Gneiting. Combining probability forecasts. In the Journal of the Royal Statistical
Society: Series B (Statistical Methodology), 2010.
— [Girard’11] Girard, Pappas. Approximate Bisimulation: A Bridge Between Computer Science and
Control Theory. In the European Journal of Control, 2011.
References: related work p.1
45](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-45-2048.jpg)
![— [Poor’13] Poor. An Introduction to Signal Detection and Estimation. Springer, 2013.
— [Rajhans’13] Rajhans, Krogh. Compositional Heterogeneous Abstraction. In Proceedings of the
International Conference on Hybrid Systems: Computation and Control (HSCC), 2013.
— [Mitsch’14] Mitsch, Platzer. ModelPlex: Verified Runtime Validation of Verified Cyber-Physical System
Models. In Proceedings of the International Conference on Runtime Verification (RV), 2014.
— [Sztipanovits’14] Sztipanovits, Bapty, Neema, Howard, Jackson. OpenMETA: A Model and
Component-Based Design Tool Chain for Cyber-Physical Systems. In From Programs to Systems - The
Systems Perspective in Computing, 2014.
— [Lee’14] Lee, Neuendorffer, Zhou. System Design, Modeling, and Simulation using Ptolemy II.
Ptolemy.org, 2014.
— [Combemale’14] Combemale, Deantoni, Baudry, France, Jezequel, Gray. Globalizing Modeling
Languages. In IEEE Computer, 2014.
References: related work p.2
46](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-46-2048.jpg)
![— [Marinescu’16] Marinescu. Model-driven Analysis and Verification of Automotive Embedded Systems.
PhD Thesis, Malardalen University, 2016.
— [Barbosa’16] Barbosa, Martins, Madeira, Neves. Reuse and Integration of Specification Logics: The
Hybridisation Perspective. In Theoretical Information Reuse and Integration, Springer, 2016.
— [Deshmukh’17] Deshmukh, Donze, Ghosh, Jin, Juniwal, Seshia. Robust Online Monitoring of Signal
Temporal Logic.
— [Guo’17] Guo, Pleiss, Sun, Weinberger. On calibration of modern neural networks. In Proceedings of
the 34th International Conference on Machine Learning (ICML), 2017.
— [Sagi’18] Sagi, Rokach. Ensemble learning: A survey. In Wiley Interdisciplinary Reviews: Data Mining
and Knowledge Discovery, 2018.
References: related work p.3
47](https://image.slidesharecdn.com/genericjobtalkspring2022nobackup-220429172101/75/Overcoming-Heterogeneity-in-Autonomous-Cyber-Physical-Systems-47-2048.jpg)

Ivan Ruchkin is a postdoctoral researcher at the University of Pennsylvania specializing in the safety and reliability of cyber-physical systems (CPS). His research focuses on integrating formal methods, machine learning, and software engineering to overcome challenges related to system heterogeneity and uncertainty. Key contributions include frameworks for confidence composition and model integration aimed at improving trustworthiness and safety in autonomous systems.






















































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)










