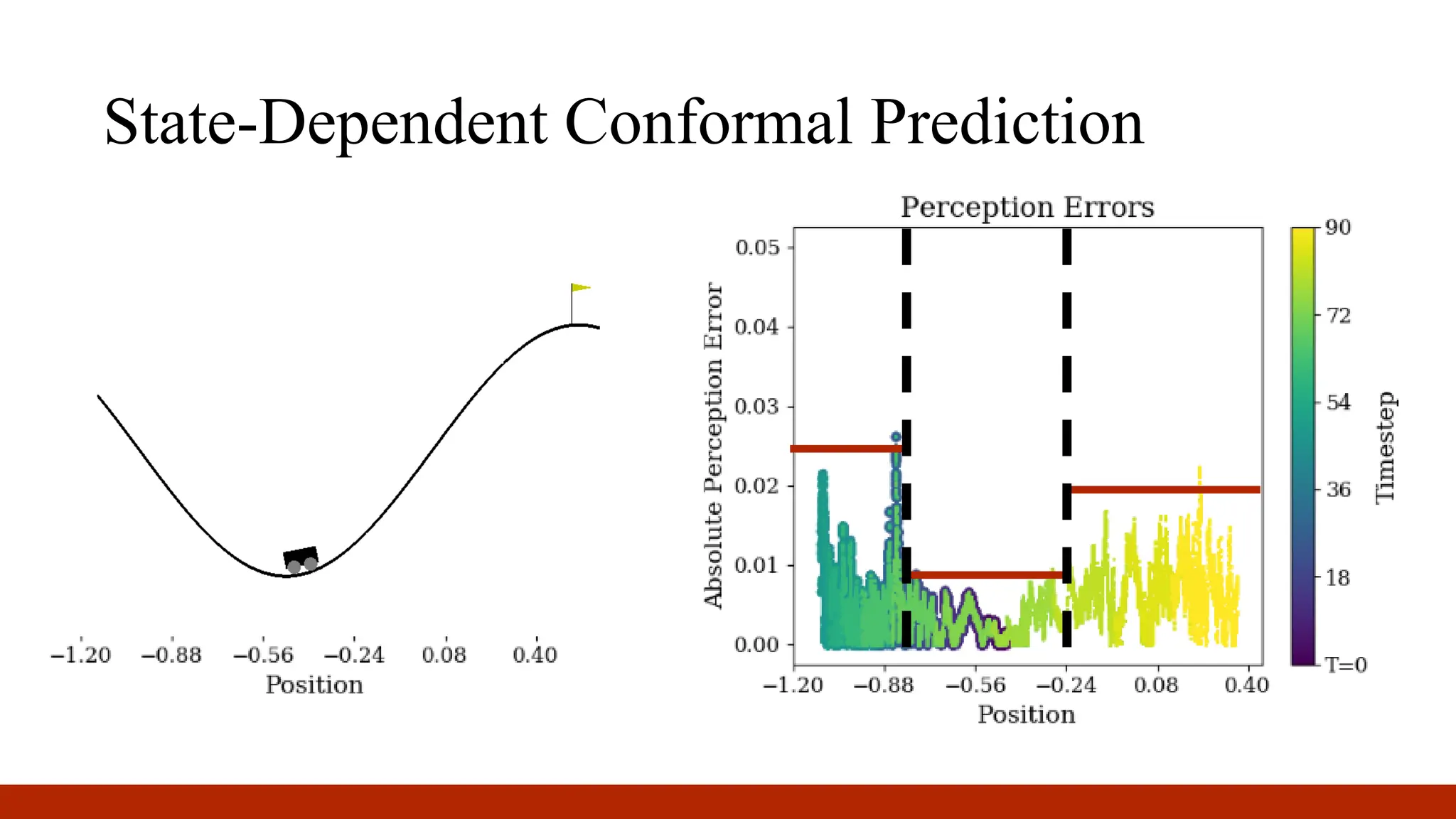
State-Dependent Conformal Perception Bounds for Neuro-Symbolic Verification of Autonomous Systems
1.
State-Dependent Conformal PerceptionBounds for
Neuro-Symbolic Verification of Autonomous Systems
Thomas Waite1, Yuang Geng2, Trevor Turnquist2, Ivan Ruchkin2*, Radoslav Ivanov1*
1RPI, 2UF, *Co-last authors: Equal contribution in supervision
NeuS 2025
2.
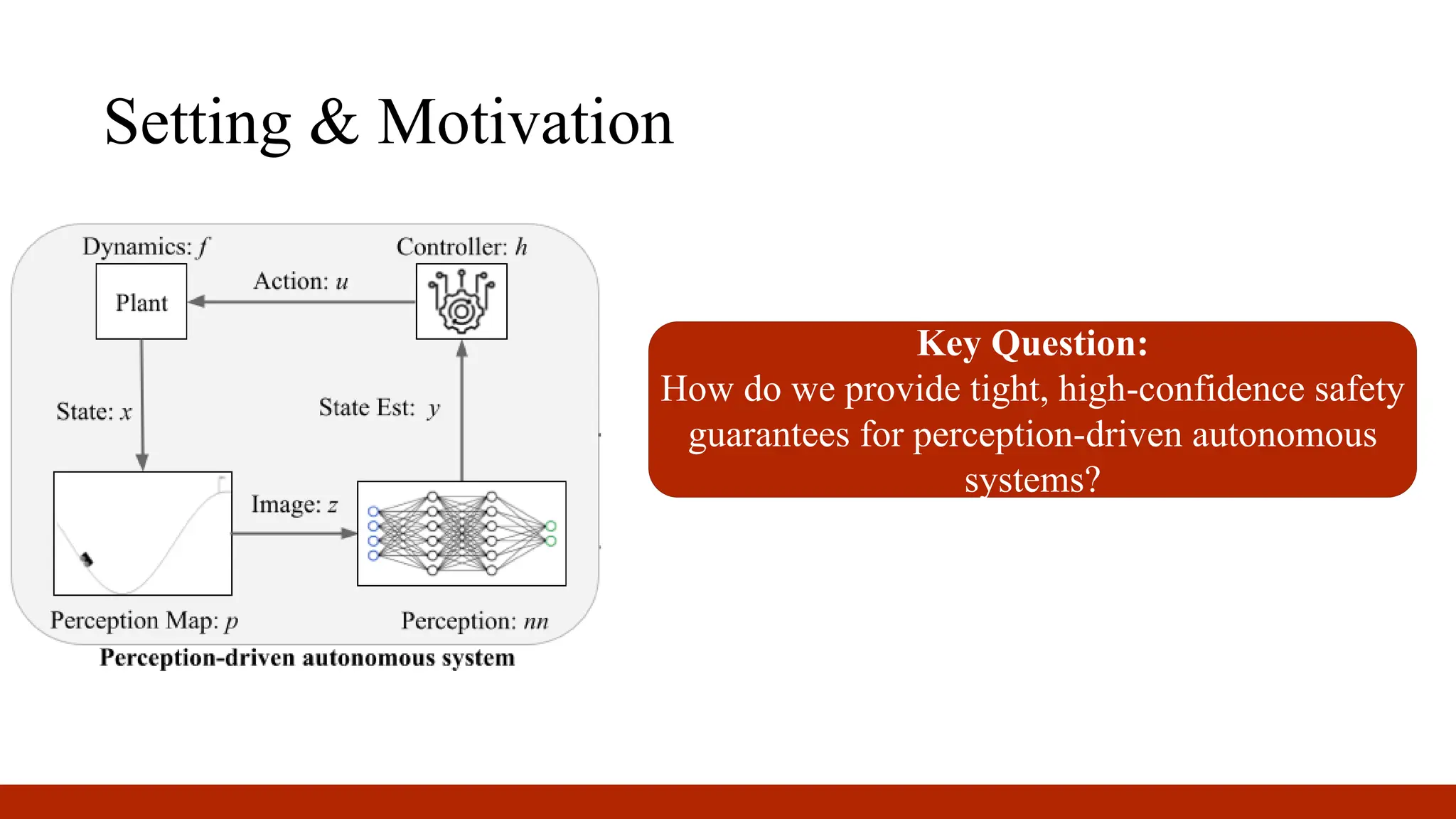
Setting & Motivation
KeyQuestion:
How do we provide tight, high-confidence safety
guarantees for perception-driven autonomous
systems?
3.
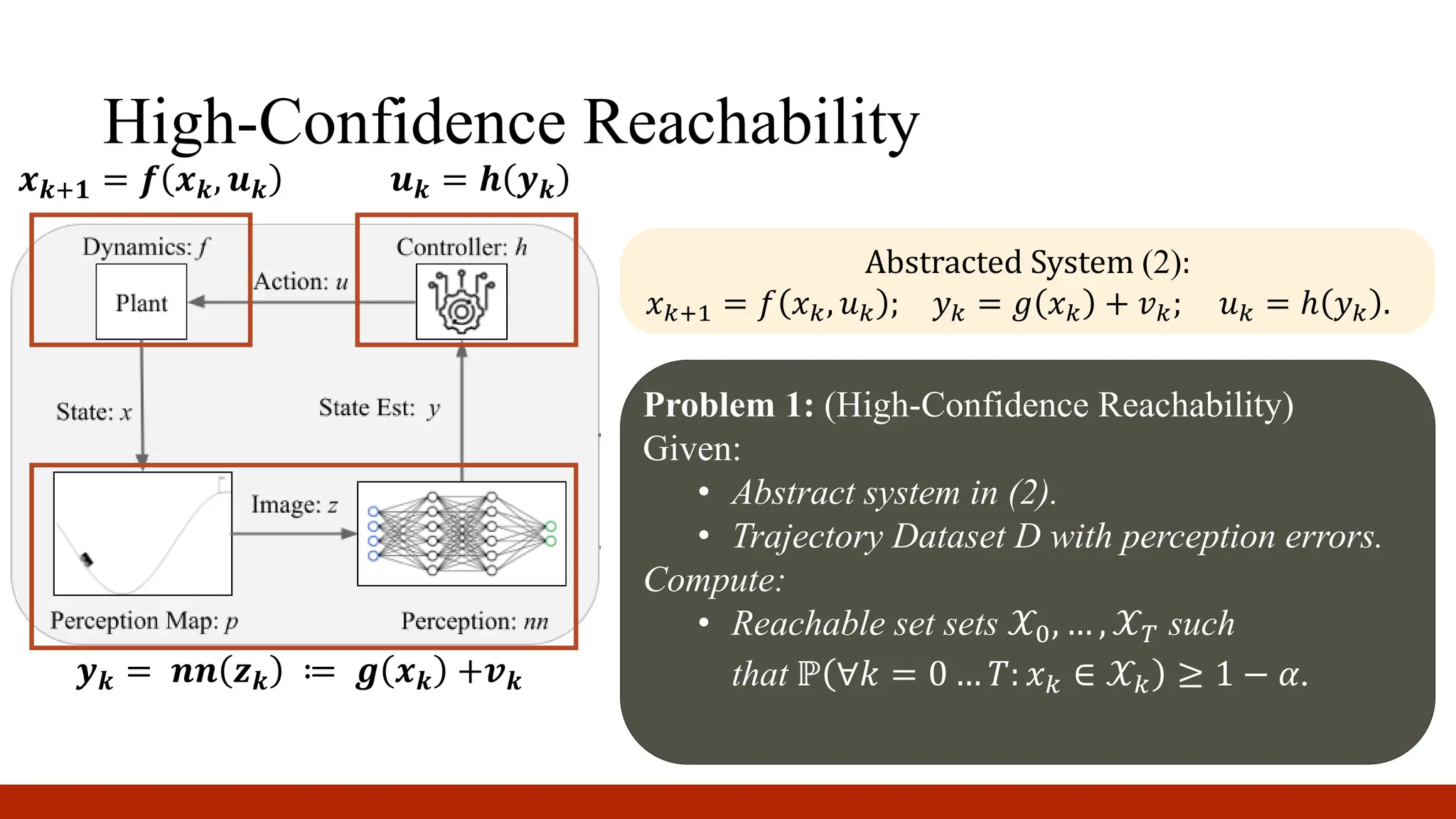
High-Confidence Reachability
Abstracted System(2):
𝑥𝑘+1 = 𝑓 𝑥𝑘, 𝑢𝑘 ; 𝑦𝑘 = 𝑔 𝑥𝑘 + 𝑣𝑘; 𝑢𝑘 = ℎ 𝑦𝑘 .
Problem 1: (High-Confidence Reachability)
Given:
• Abstract system in (2).
• Trajectory Dataset D with perception errors.
Compute:
• Reachable set sets 𝒳0, … , 𝒳𝑇 such
that ℙ ∀𝑘 = 0 … 𝑇: 𝑥𝑘 ∈ 𝒳𝑘 ≥ 1 − 𝛼.
𝒙𝒌+𝟏 = 𝒇 𝒙𝒌, 𝒖𝒌 𝒖𝒌 = 𝒉 𝒚𝒌
𝒚𝒌 = 𝒏𝒏 𝒛𝒌 ≔ 𝒈 𝒙𝒌 +𝒗𝒌

































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)





![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)








