Документ описывает полезную модель механизма привода вала отбора мощности мобильных энергетических средств, содержащую планетарный редуктор и гидроуправляемую фрикционную муфту. Основные задачи модели включают блокировку редуктора и обеспечение реверсивного вращения вала отбора мощности, что решается путем установки синхронизатора и механизма управления блокировкой. Этот механизм предназначен для повышения эффективности работы в нестабилизированном режиме и уменьшения потерь мощности.
![BY 6480 U 2010.08.30
2
Полезная модель относится к области транспортного машиностроения и может быть
использована в системах отбора мощности.
Известен механизм привода вала отбора мощности мобильных энергетических
средств, содержащий планетарный редуктор, гидроуправляемую фрикционную муфту,
дроссель-распределитель, гидромотор, датчик и задатчик частоты вращения хвостовика
вала отбора мощности [1].
Недостатками данного механизма привода вала отбора мощности являются отсутствие
возможности блокировки планетарного редуктора, вследствие чего требуется постоянная
стабилизация частоты вращения хвостовика вала отбора мощности путем управления гид-
ромотором, что ведет к увеличению потерь мощности, и отсутствие реверсивного враще-
ния хвостовика вала отбора мощности.
Техническими задачами данной полезной модели являются: блокировка планетарного
редуктора при работе в режиме нестабилизированного вала отбора мощности, обеспече-
ние реверсивного вращения хвостовика вала отбора мощности.
Поставленные технические задачи решаются путем использования механизма привода
вала отбора мощности мобильных энергетических средств, содержащего планетарный ре-
дуктор, хвостовик вала отбора мощности, гидроуправляемую фрикционную муфту, вал
привода, гидромотор, имеющий кинематическую связь с одним из звеньев планетарного
редуктора, дроссель-распределитель, датчик частоты вращения хвостовика вала отбора
мощности, блок управления работой, где установлен синхронизатор, кинематически свя-
занный с коронной и солнечной шестернями планетарного редуктора, также содержится
механизм управления блокировкой планетарного редуктора.
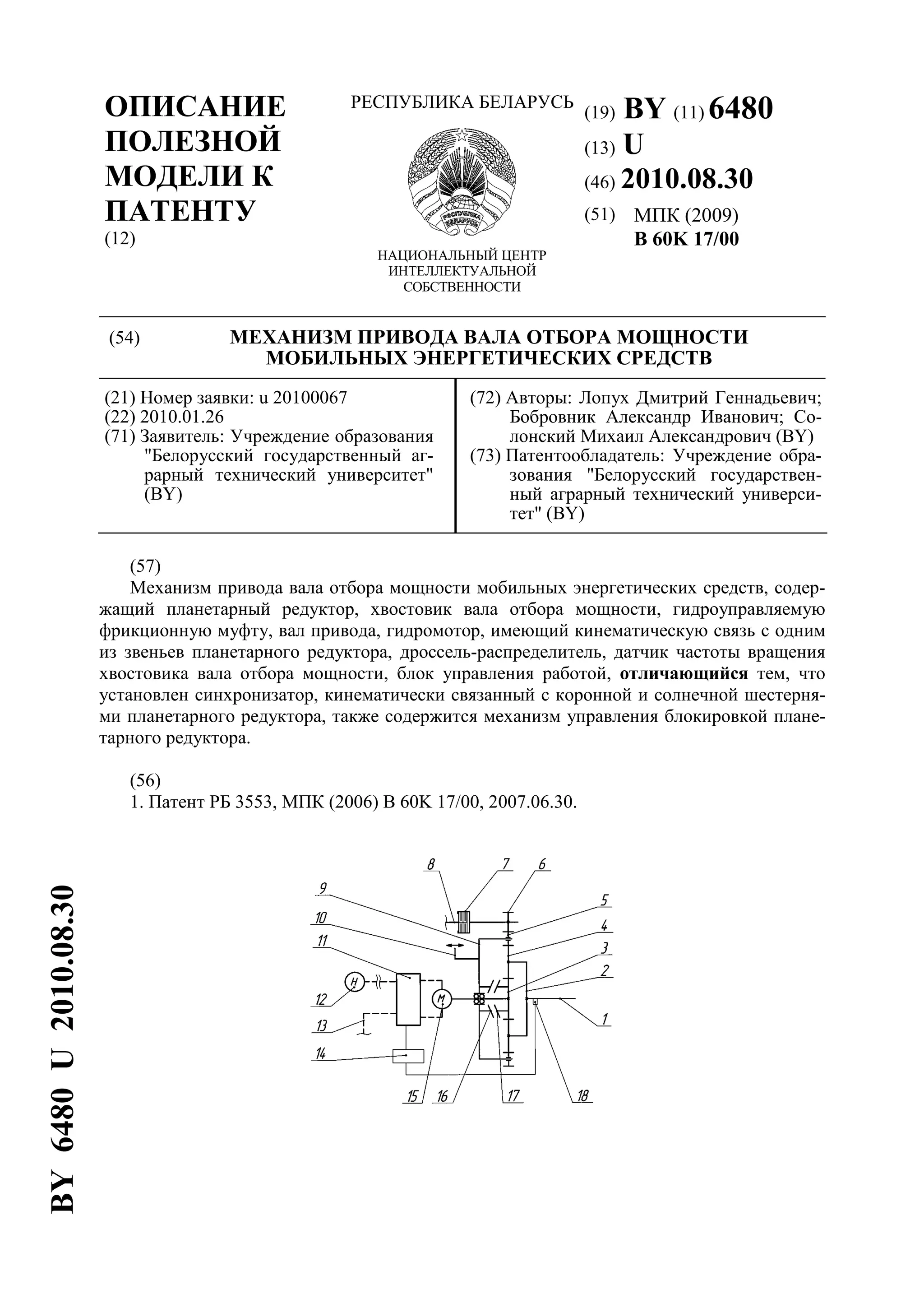
На фигуре изображена примерная схема механизма привода вала отбора мощности
мобильных энергетических средств в режиме стабилизации частоты вращения хвостовика.
Механизм привода вала отбора мощности мобильных энергетических средств включа-
ет: хвостовик вала отбора мощности 1, планетарный редуктор, гидроуправляемую фрик-
ционную муфту 7, вал привода 8, механизм управления блокировкой планетарного
редуктора, дроссель-распределитель 11, источник давления 12, сливную магистраль 13,
блок управления работой 14, гидромотор 15, датчик частоты вращения хвостовика вала
отбора мощности 18.
В свою очередь, планетарный редуктор состоит из водила 2, солнечной шестерни 3,
сателлитов 4, коронной шестерни 5 и ведущей шестерни 6. Также механизм управления
блокировкой планетарного редуктора состоит из рычага блокировки планетарного редук-
тора 9, рычага управления синхронизатором 10 и синхронизатора, состоящего из ведущих
элементов 16 и ведомых элементов 17.
Механизм привода вала отбора мощности мобильных энергетических средств работа-
ет следующим образом: при работе механизма привода вала отбора мощности (ВОМ) мо-
бильных энергетических средств в стабилизированном режиме (поддержание постоянной
частоты вращения хвостовика вала отбора мощности 1) подается сигнал блоком управле-
ния 14 на дроссель-распределитель 11, который связывает источник давления 12 с гидро-
мотором 15, который в свою очередь вращает солнечную шестерню 3, в то же время
происходит включение гидроуправляемой фрикционной муфты 7 и передача вращения от
вала привода 8 через ведущую шестерню 6 на коронную шестерню 5, после чего происхо-
дит разгон хвостовика ВОМ 1, датчик частоты вращения хвостовика ВОМ 18 фиксирует
обороты и подает сигнал на блок управления работой 14. Блок управления 14 анализирует
поступающую информацию. Так, если частота вращения хвостовика вала отбора мощно-
сти 1 выше, чем установленная, то блок управления работой механизма 14 подает соот-
ветствующий сигнал на дроссель-распределитель 11, который связывает соответствую-
щую полость гидромотора 15 с источником давления 12, соответственно этому соединяет
вторую полость со сливной магистралью 13, и гидромотор 15 вращает солнечную шестер-](https://image.slidesharecdn.com/6480-151010195625-lva1-app6892/75/slide-2-2048.jpg)












































































