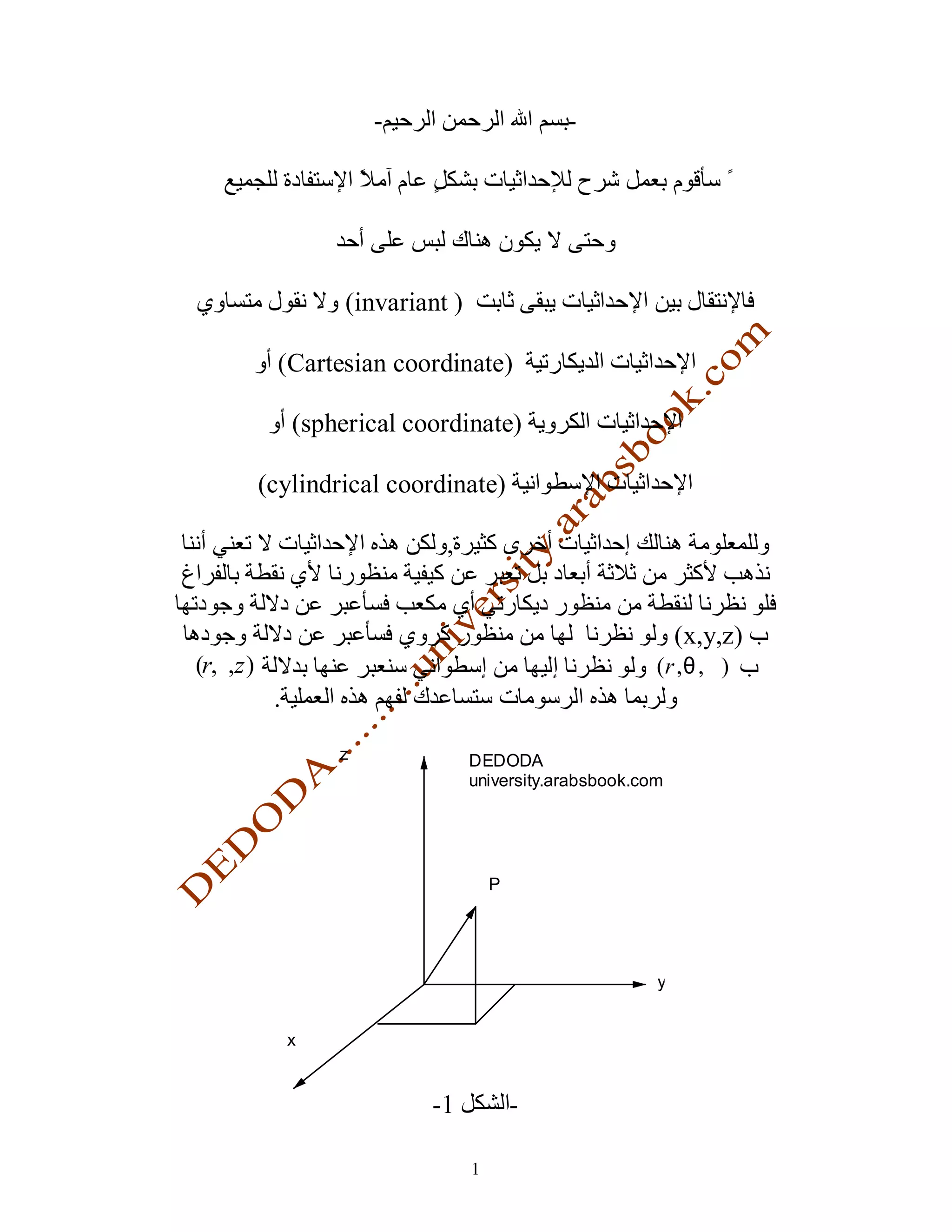
-3 -
.
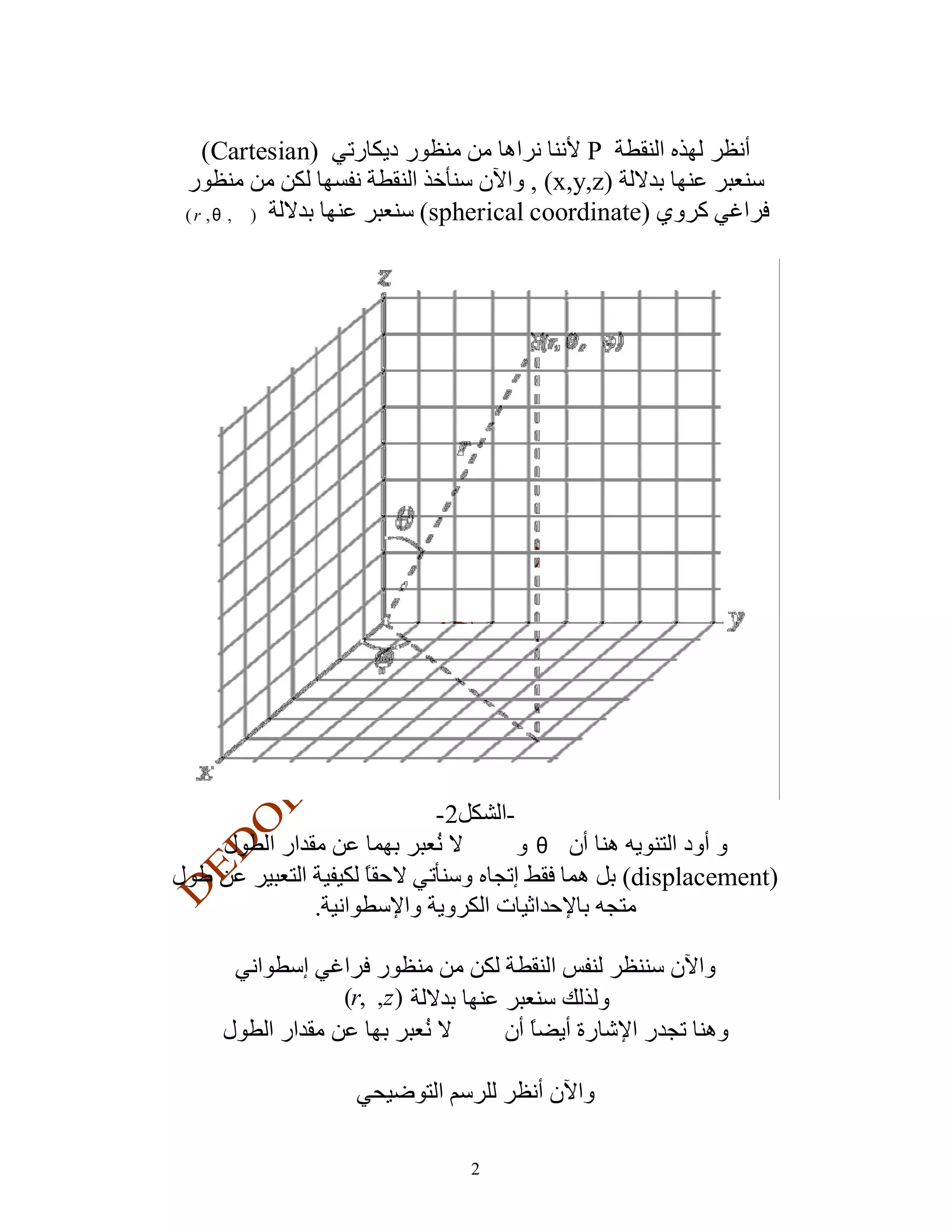
(Coordinate) (component)
r -:
A = 5i + 3 j − 4k
(unit vector) (i , j , k )
-:
i .i = 1 j.j = 1 k .k = 1
i × i = 0 j× j = 0 k × k = 0
i .j = 0 i .k = 0 j.k = 0
i × j= k j× k = i k × i = j
3
4.
(unit vectors)
(Cartesian coordinate)
(in general )
:
(a1 , a 2 , a3 )
a1.a1 = 1 a2 .a2 = 1 a3.a3 = 1
a1 × a1 = 0 a2 × a2 = 0 a3 × a3 = 0
a1.a2 = 0 a1.a3 = 0 a2 .a3 = 0
a1 × a2 = a3 a2 × a3 =a1 a3 × a2 = a1
(orthogonal unit curvilinear)
.
(Orthogonal curvilinear coordinate)
(Cartesian coordinate)
.
-:
r
l = x i +y j +z k ...........1-a
r
d l = dx i +dy j +dz k ...........(1-b)
r
(distance) (dl)
d l2 = dx 2 +dy 2 + dz 2 (2)
4
5.
z y x
x = F1 (q1, q2 , q3 ) (4-a)
y=F2 (q1, q2 , q3 ) (4-b)
z=F3 (q1, q2 , q3 ) (4-c)
(q 1 , q 2 , q 3 ) x
(q 1 , q 2 , q 3 ) y
(q 1 , q 2 , q 3 ) z
(certain value) qs
(2) (1-b) (1-a)
-: z y x
∂x ∂x ∂x
dx = dq1 + dq 2 + dq 3 (5-a)
∂q1 ∂q 2 ∂q 3
∂y ∂y ∂y
dy = dq1 + dq 2 + dq 3 (5-b)
∂q1 ∂q 2 ∂q 3
∂z ∂z ∂z
dz = dq1 + dq 2 + dq 3 (5-c)
∂q1 ∂q 2 ∂q 3
-:
3
∂x
dx = ∑i =1 ∂q i
dq i (6 -a )
3
∂y
dy = ∑i =1 ∂q i
dq i (6 -b )
3
∂z
dz = ∑
i =1 ∂q i
dq i (6 -c )
5
6.
3
∂x ∂x
dx 2 = ∑ dq i dq j (7-a)
i =1 ∂q i ∂ q j
3
∂y ∂y
dy 2 = ∑ dq i dq j (7-b)
i =1 ∂q i ∂ q j
3
∂z ∂z
dz 2 = ∑ dq i dq j (7-c)
i =1 ∂ q i ∂q j
(2) (7-c) (7-b) (7-a)
-: (2)
3 ∂x ∂x ∂y ∂y ∂z ∂z
dl = ∑
2
+ + dqi dq j (8)
i , j =1 ∂qi ∂q j ∂qi ∂q j ∂qi ∂q j
∂x ∂ x ∂y ∂y ∂z ∂ z
+ + = hij
∂q ∂q ∂q i ∂q j ∂q i ∂q j
i j
(8) (metric coefficients) (hij )
-:
3
dl =
2
∑ h dq dq
i , j =1
ij i j (9)
Kronecker delta
6
7.
hii = hi2
,i=j
hij = hij δij =
h ij = 0
,i ≠ j
(9)
3
d l2 = ∑hi2dqi2 (10)
i
d l2 = d l12 +d l22 +d l32
(metric coefficients)
∂x 2 ∂y 2 ∂z 2
h =
2
+ + (11)
∂q i ∂q i ∂q i
i
(10)
d l 1 = h1dq1 (12-a)
d l 2 = h 2dq 2 (12-b)
d l 3 = h3dq 3 (12-c)
(Curvilinear coordinate)
r
d l = hdq1 a1+h2dq2 a2 +hdq3 a3
1 3 (13)
r ∂l ∂l ∂l
dl= dq1 + dq2 + dq3 (14)
∂q1 ∂q 2 ∂q3
7
8.
(14) (13)
1 ∂l
= a1 ( 1 5 -a )
h1 ∂q 1
1 ∂l
= a2 (1 5 -b )
h2 ∂q 2
1 ∂l
=a (1 5 -c )
h3 ∂q 3
3
1 ∂l
ai = (16)
hi ∂q i
(metric coefficients)
(11)
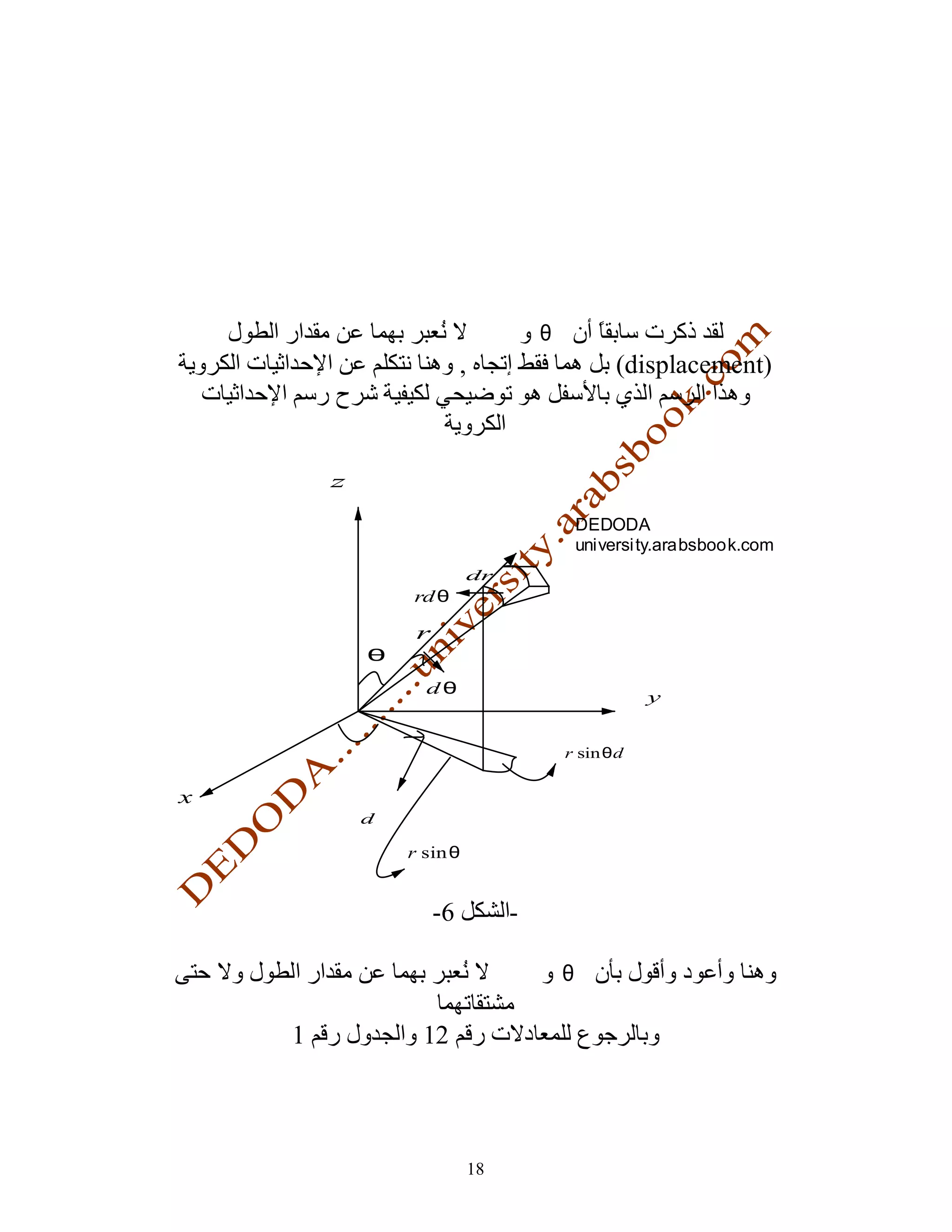
(spherical coordinate)
x = r s in θ c o s ϕ
y = r sin θ sin ϕ
z = r cosθ
q = (q r , q θ , q ϕ )
(11)
8
9.
∂x ∂y ∂z
2 2 2
h r2 = + +
∂r ∂r ∂r
h r = (sin θ cos ϕ ) 2
2
+ (sin θ sin ϕ ) 2 + (co s θ ) 2
h r2 = sin 2 θ co s 2 ϕ + sin 2 θ sin 2 ϕ + co s 2 θ
h r2 = sin 2 θ (co s 2 ϕ + sin 2 ϕ ) + co s 2 θ = 1
∴ hr = 1 (17 )
∂x ∂y ∂z
2 2 2
h =
θ
2
+ +
∂θ ∂θ ∂θ
hθ2 = r 2 cos 2 θ cos 2 ϕ + r 2 cos 2 θ sin 2 ϕ + r 2 sin 2 θ
hθ2 = r 2 →∴ hθ = r (18)
2 2 2
∂x ∂y ∂z
h =
2
ϕ + +
∂ϕ ∂ϕ ∂ϕ
hϕ2 = r 2 sin 2 θ sin 2 ϕ + r 2 sin 2 θ cos2 ϕ
hϕ2 = r 2 sin 2 θ →∴ hϕ = r sin θ (19)
(cylindrical coordinate)
x = r cosϕ
y = r s in ϕ
z = z
q = q r ,q ϕ ,q z
(11)
9
10.
∂x ∂y ∂z
2 2 2
h r2 = + +
∂r ∂r ∂r
h r = cos2
2
ϕ + sin 2 ϕ = 1
∴ h r =1 (2 0 )
2 2 2
∂x ∂y ∂z
h =
ϕ
2
+ +
∂ϕ ∂ϕ ∂ϕ
h ϕ2 = r 2 sin 2 ϕ + r 2 cos 2 ϕ
h ϕ2 = r 2 → ∴ h ϕ = r (21)
∂x ∂y ∂z
2 2 2
h =
2
+ +
∂z ∂z ∂z
z
hz2 = 1 →∴ hz = 1 (22)
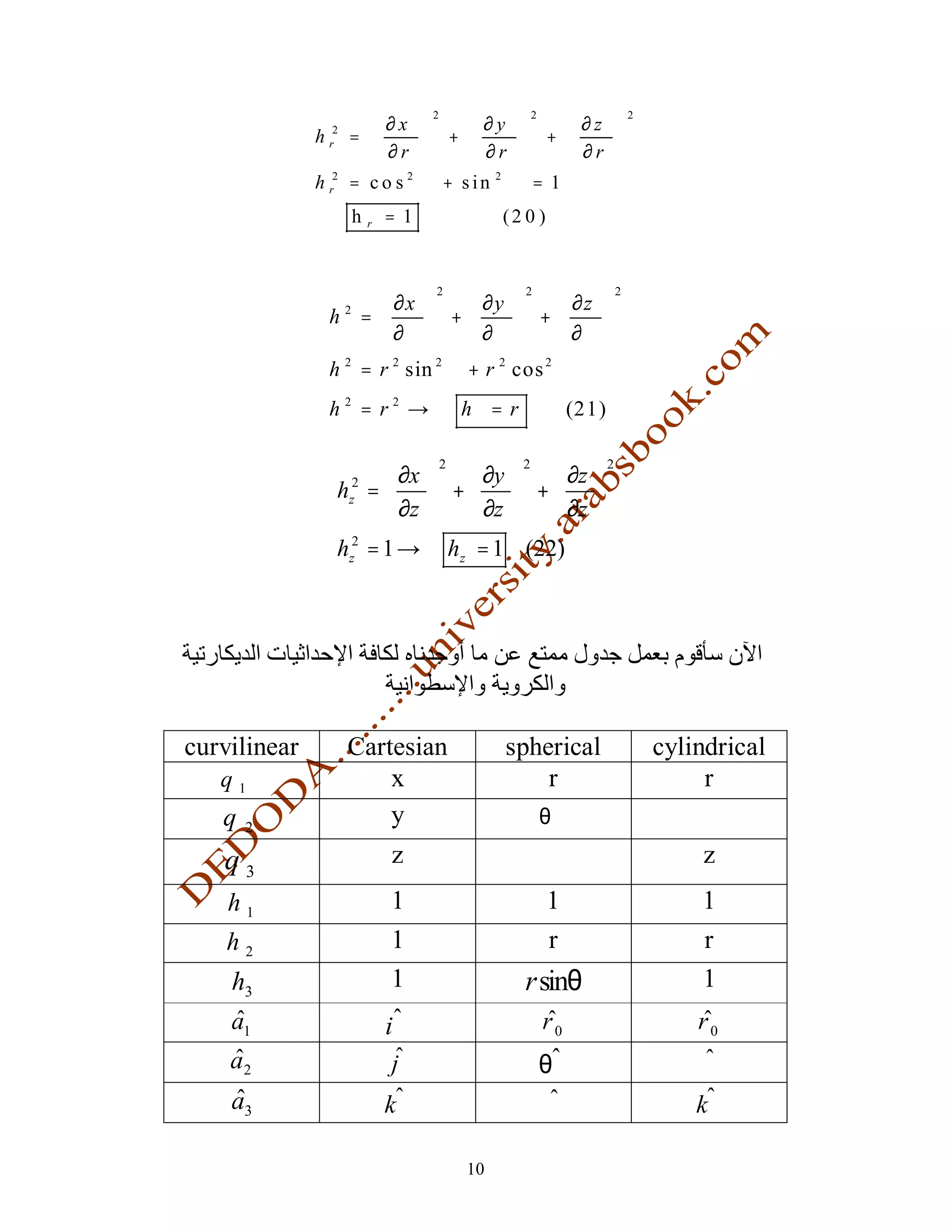
curvilinear Cartesian spherical cylindrical
q1 x r r
q y θ ϕ
2
q3 z ϕ z
h1 1 1 1
h2 1 r r
h3 1 r sinθ 1
a1 i r0 r0
a2 j θ ϕ
a3 k ϕ k
10
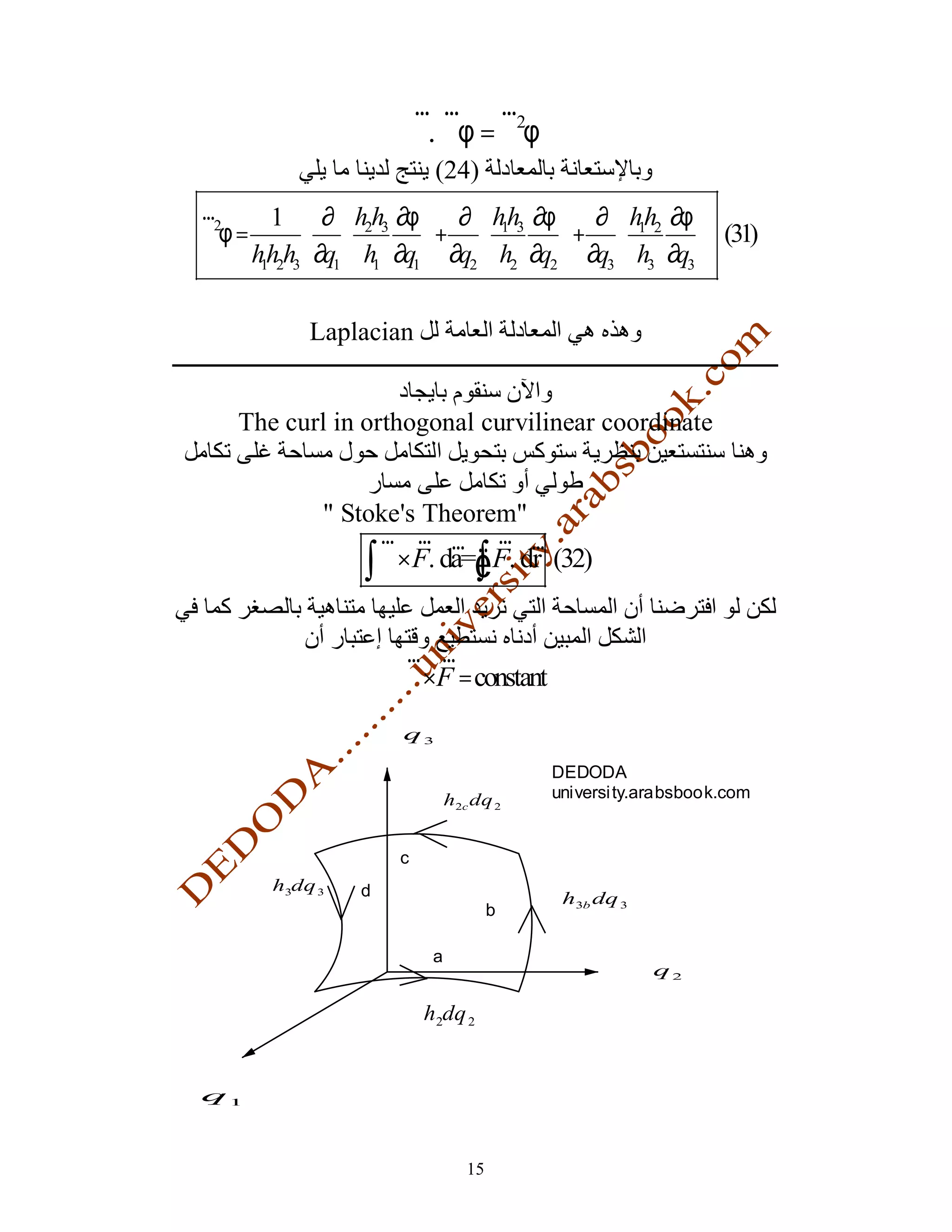
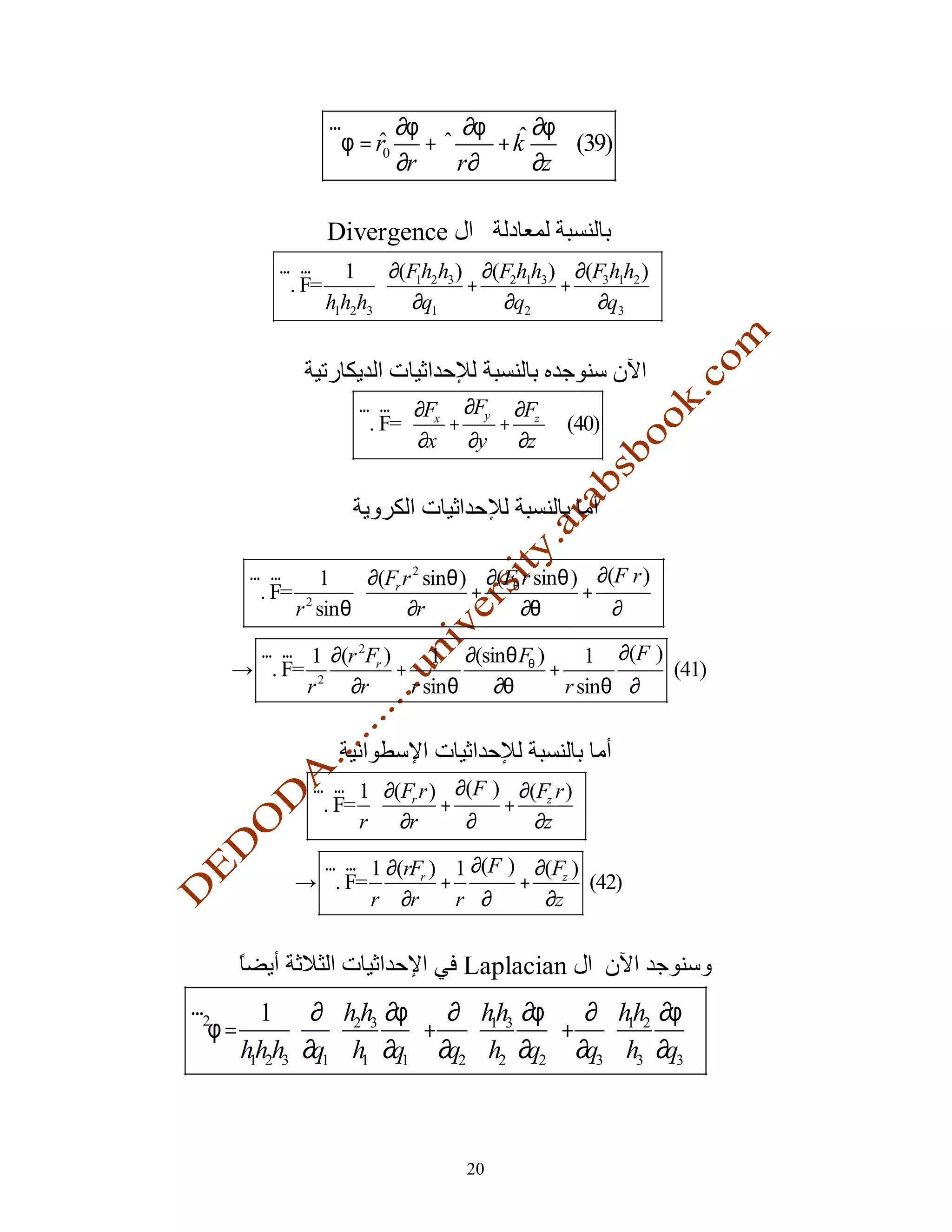
(Gauss's or Divergencetheorem)
r r r r
Ñ
∫
S
F .da = ∫ ∇.Fdτ
v
(25)
r r
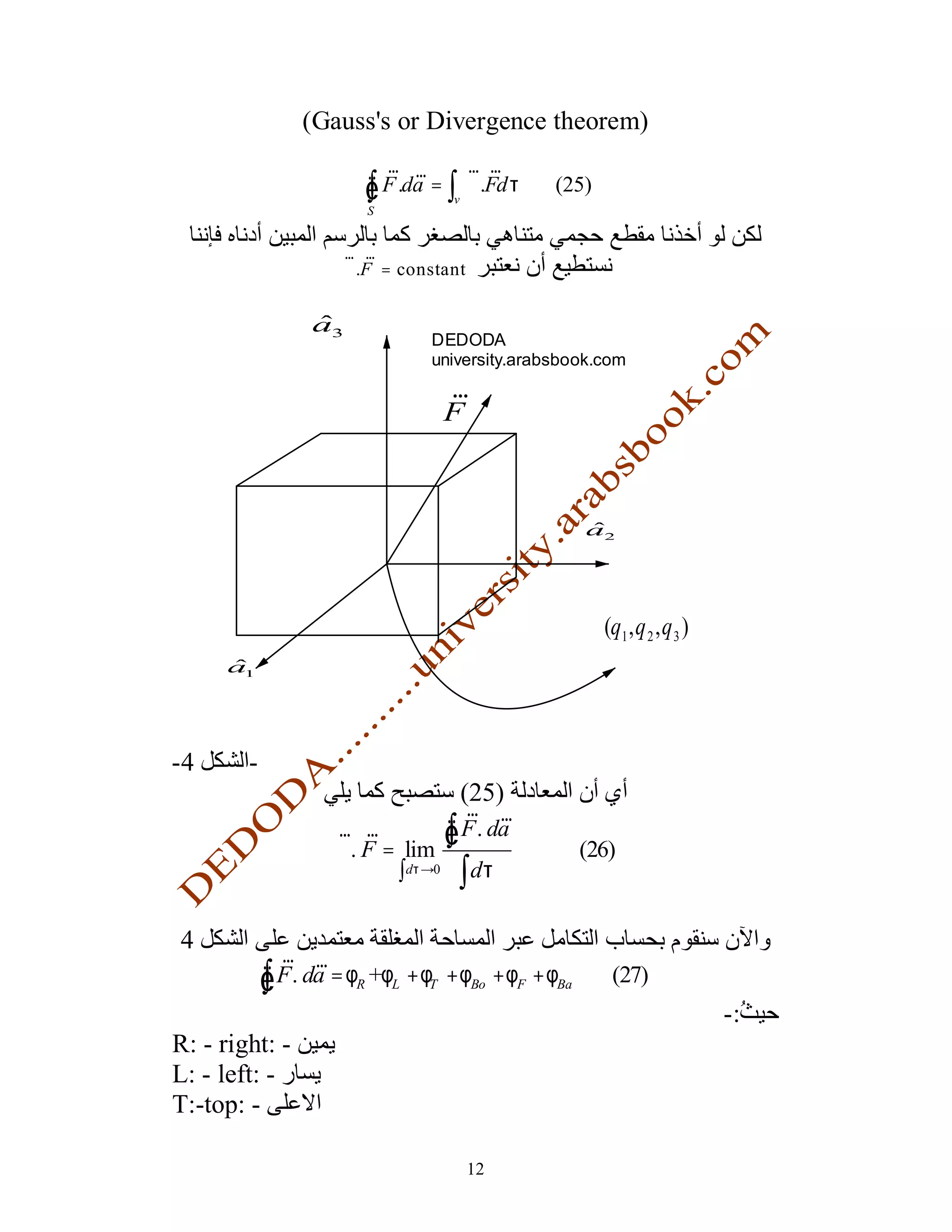
∇ .F = constant
a3
DEDODA
university.arabsbook.com
r
F
a2
(q1 , q 2 , q 3 )
a1
-4 -
(25)
r r
r r
∇. F = lim
Ñ
∫ F . da
(26)
∫dτ →0 ∫ dτ
4
r r
Ñ
∫ F . da = φR +φL + φT + φBo + φF + φBa (27)
-:
R: - right: -
L: - left: -
T:-top: -
12