Download to read offline


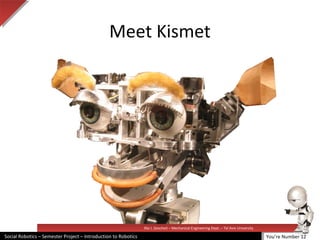
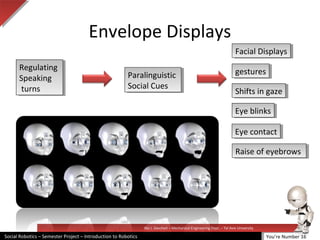
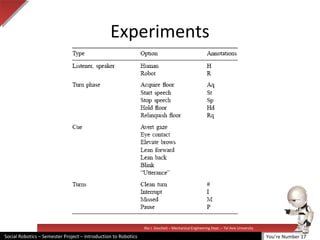
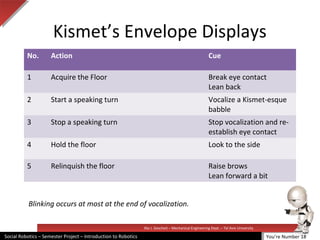
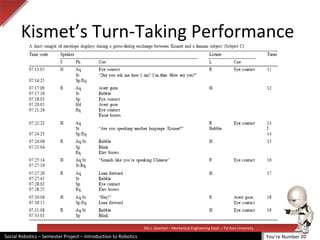
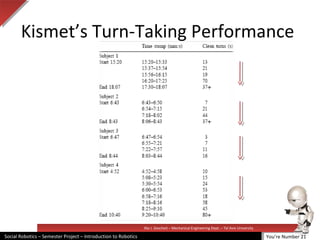
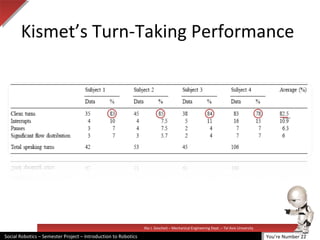

The document discusses social robotics and focuses on the robot Kismet. It describes Kismet as an early social robot created to interact with humans using social cues like turn-taking, eye contact and facial expressions. Experiments showed people responded intuitively to Kismet's social cues and engaged with it naturally through turn-taking exchanges, though Kismet had limitations in its perception, mechanics and responses. The document outlines the goals of evaluating social robots and improving their ability to naturally interact with humans.















































