Download to read offline


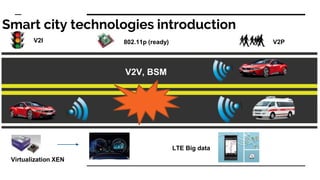
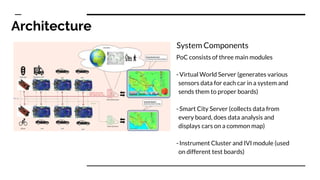
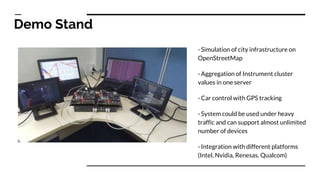
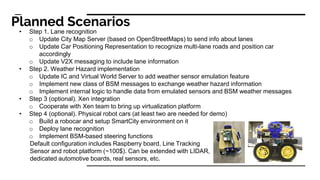

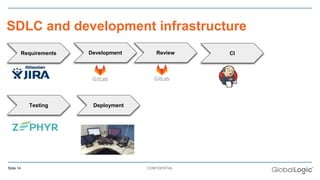

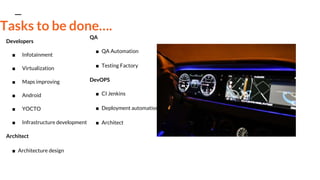

The document outlines a smart city technology framework developed by Viktoriia Taraniuk in September 2018, focusing on various components such as virtualization, data analysis, and vehicle-to-everything (V2X) communication. It describes a system comprising a virtual world server, a smart city server, and an instrument cluster for managing traffic data and integration with other platforms. The document also details a multi-step implementation plan for features like lane recognition and weather hazard handling, along with specified development goals and potential scenarios for demonstration.












































































