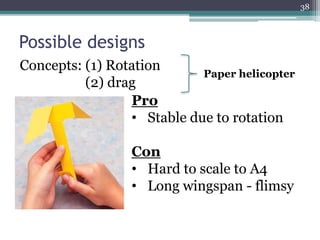
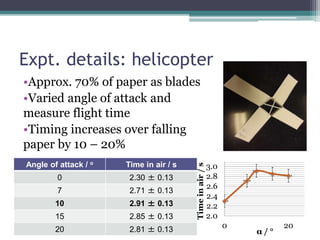
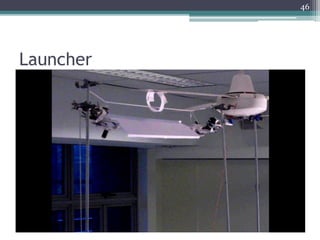
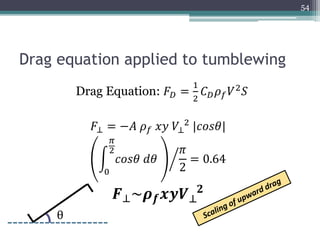
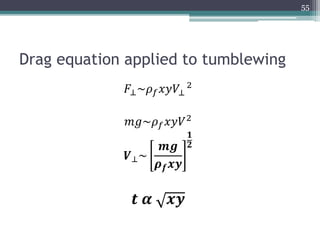
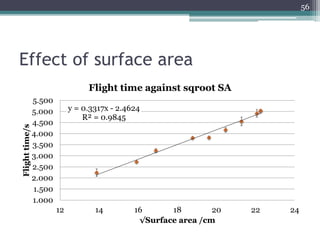
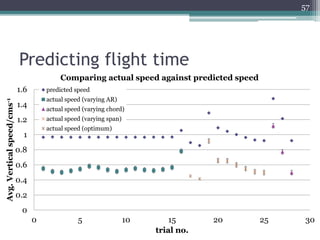
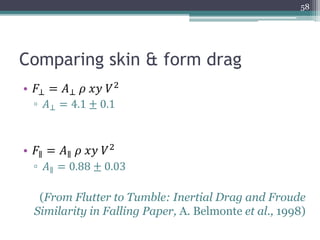
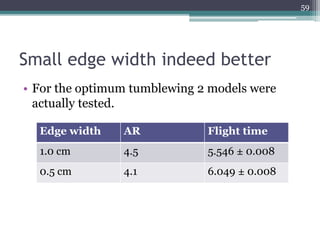
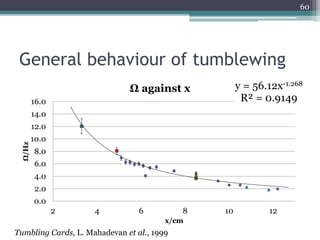
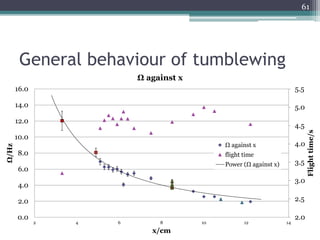
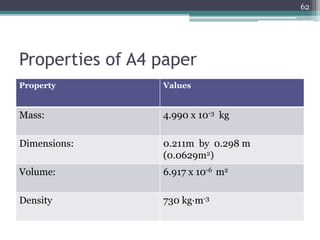
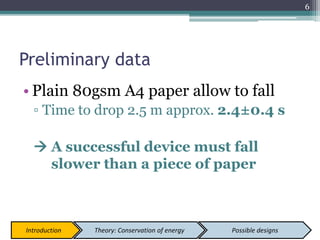
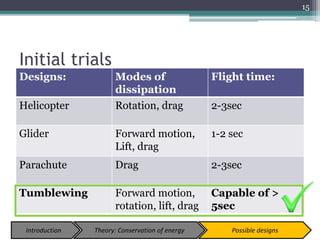
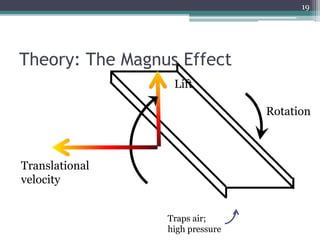
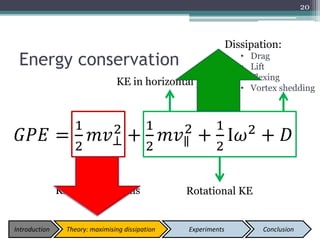
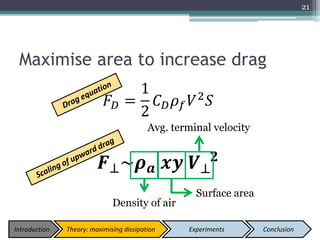
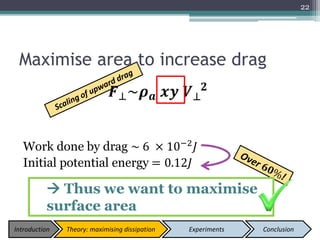
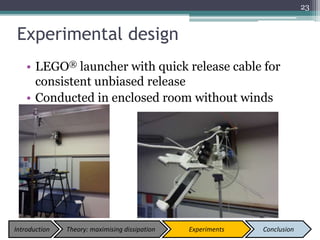
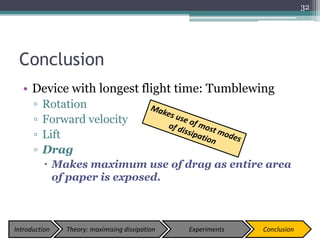
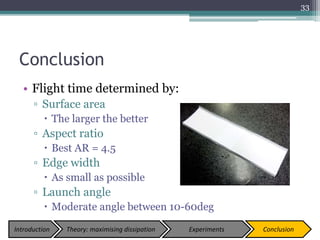
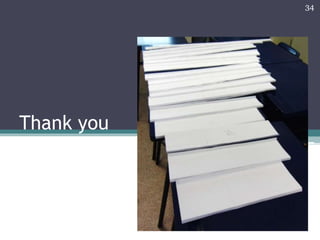
The document describes experiments to design a paper device that falls slowly through the air. It summarizes that a tumblewing design, which rotates and moves horizontally, works best by maximizing surface area for drag. Testing showed flight time increased with higher aspect ratio around 4.5, smaller edge width, and moderate launch angles between 10-60 degrees. The optimum design had an aspect ratio of 4.1, surface area of 573.5 cm^2, and edge width of 0.5 cm, achieving a maximum flight time of 6.5 seconds.


![[1] Effect of aspect ratio
• Independent variable: Aspect ratio y/x
• Dependent variable
▫ Flight time
• Constants:
▫ Area, xy (450±3)cm2
▫ Edge width (1.00±0.05)cm
▫ Mass (4.990±0.005)g
▫ Launch angle (45.0±0. 5)deg
24
x
y
3.0 4.1 4.5 5.0 6.2 8.0 10.0
11.0 11.7 12.1 12.9 13.9 14.9 16.0 17.2
Introduction Theory: maximising dissipation Experiments Conclusion](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-24-320.jpg)
![[1] Effect of aspect ratio
25
4.00
4.20
4.40
4.60
4.80
5.00
5.20
1.0 6.0 11.0 16.0
Flighttime/s
Aspect ratio
Flight time against AR
Introduction Theory: maximising dissipation Experiments Conclusion](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-25-320.jpg)
![• Variable: edge width, e
▫ 0.3 0.6 0.9 1.0 1.2 1.5 1.8 2.1cm
• Constants:
▫ Span, y (45.00±0.05)cm
▫ Chord, x (10.00±0.05)cm
▫ Launch angle (45.0±0. 5)deg
• Assumption:
▫ Change in mass will not affect
flight time
[2] Effect of edge width
26
e
x
y
Introduction Theory: maximising dissipation Experiments Conclusion](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-26-320.jpg)
![[2] Effect of edge width
27
3.00
3.50
4.00
4.50
5.00
5.50
6.00
0.0 0.5 1.0 1.5 2.0 2.5
Flighttime/s
Edge width /cm
Flight time against edge width
Introduction Theory: maximising dissipation Experiments Conclusion](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-27-320.jpg)
![[3] Effect of launch angle
• Variable: Launch angle θ
▫ 0 – 120deg, at 10deg intervals
• Dependent variable:
▫ time
• Constants:
▫ Span, y (45.00±0.05)cm
▫ Chord, x (10.00±0.05)cm
▫ Edge width (1.00±0.05)cm
28
θ
Direction of flight
Introduction Theory: maximising dissipation Experiments Conclusion](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-28-320.jpg)
![[3] Effect of launch angle
29
Introduction Theory: maximising dissipation Experiments Conclusion
“Dead
Zone”
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
6.0
0.0 20.0 40.0 60.0 80.0
Flighttime/s
θ/deg
Flight time against launch angle](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-29-320.jpg)
![[4] The best tumblewing
• Characteristics:
▫ AR of 4.5
▫ Maximum surface area
▫ Small edge width
▫ Moderate launch angle
• Optimum model:
30
Span/cm Chord/cm AR SA/cm2 Edge/cm
48.6 11.8 4.1 573.5 0.5
Introduction Theory: maximising dissipation Experiments Conclusion](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-30-320.jpg)
![[4] The best tumblewing
31
2.00
2.50
3.00
3.50
4.00
4.50
5.00
5.50
6.00
6.50
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Flighttime/s
Wing no.
Comparing flight times optimum
varying aspect ratio
varying chord
varying span
Introduction Theory: maximising dissipation Experiments Conclusion](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-31-320.jpg)
![[blank]
35](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-35-320.jpg)
![[blank]
36](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-36-320.jpg)
![[blank]
37](https://image.slidesharecdn.com/2ffcaef6-6431-4e80-939e-2502b734b7c9-170114042537/85/Slow-descent-v3_IYPT-37-320.jpg)